一种小模数渐开线齿轮齿形误差测量方法
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及一种小模数渐开线齿轮齿形误差测量方法,尤其是涉及一种基于白光共聚焦技术的小模数渐开线齿轮齿形误差测量方法。
背景技术
小模数齿轮广泛应用于航天航空、国防、电子产品、钟表等领域的精密仪器仪表的制造中。作为关键的运动传动件,其质量直接影响到仪器仪表的运动精度、噪音和寿命等。因此,实现对小模数齿轮的高精度测量是保证仪器仪表质量的一个关键技术问题。目前在齿轮测量领域,中模数齿轮测量技术已经成熟,而相对中模数齿轮,小模数齿轮的齿槽间隙小、轮齿惯性小、刚性差,实现小模数齿轮的测量(特别是微小齿轮的测量)一直是齿轮业界的难题。近年来,随着科学技术的发展,以光学测量方法为代表的非接触式表面测量技术逐渐实现了小模数齿轮的测量。相比于视觉测量和激光测量方法,本发明提出的基于白光共聚焦技术的测量方法,操作更方便,测量精度更高,分辨率可达纳米级别。
发明内容
本发明的目的:为了解决在传统测量方法中,小模数齿轮整体尺寸小、齿槽间隙更小使得测针探头难以对准齿槽,测试人员操作稍有不慎易碰撞损坏测针探头,而齿轮刚性差使得齿轮齿形误差难以提取,测量精度和重复性都难以保证,因此本发明提出一种小模数渐开线齿轮齿形误差测量方法。
为实现上述目的,本发明采用以下技术方案:
S1通过ST400三维表面形貌仪获得齿轮齿面图像及其数据,保存测量结果。
S2用professional 3D打开上述结果文件,将被测图像调平并填充非测量点。
S3旋转齿面图像使齿面纹理和坐标轴对齐。
S4提取属于渐开线区域内齿廓,导出渐开线轮廓二维坐标点数据。
S5二维数据点导入matlab中,用压缩粒子群算法对渐开线隐函数方程进行拟合。
S6设置算法运行次数,输出拟合残差平方和最小值的结果组。
S7通过拟合参数计算齿轮齿形误差。
所述S1具体还包括以下步骤:
S1.1.选择合适量程探头安装后,对测量系统做背底噪声处理。
S1.2.在形貌仪平台上固定好夹具后,齿轮轴线平行于工作台且使光学测量探头发射的白光光点聚焦于齿面上。
S1.3.选择面扫描方式和扫描区域,设置采样频率和步长,开始测量。
相对于现有技术,本发明的有益效果为:
本发明提出的基于三维表面形貌仪的小模数渐开线齿轮齿形误差测量方法,该方法具有测量精度高,速度快,测量重复性好的优点,可适用于小模数直齿、锥齿和斜齿轮的齿形误差测量,也可用于不同材料的小模数齿轮齿形误差测量。测量方法通用性强,既可用于0.1~1mm模数的小模数齿轮,也可用于0.1mm模数以下的微小模数齿轮。
附图说明
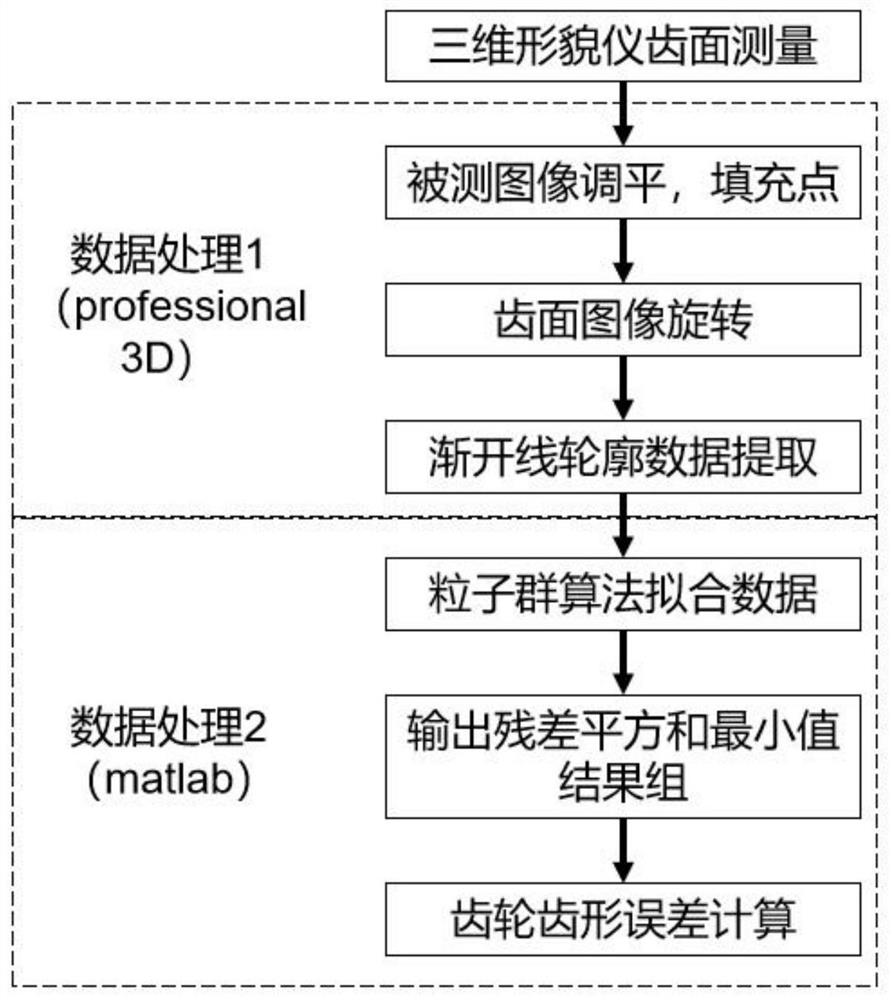
图1小模数渐开线齿轮齿形误差测量流程。
图2三维齿面形貌及二维渐开线轮廓。
图3直角坐标系的渐开线表示。
其中:O(x0,y0)为基圆圆心坐标,θ为渐开线与基圆所在交点与圆心连线与x轴的夹角,
图4渐开线测量数据及其拟合曲线。
具体实施方式
以下结合附图和实施例对本发明进行详细说明。
本发明采用的技术方案为一种小模数渐开线齿轮齿形误差测量方法,该方法的技术实施流程如下:
1)数据处理1:
被测图像调平,填充点:
用professional 3D打开三维表面形貌仪结果文件,用LS最小方形平面方法将被测图像调平,并依据从领域值计算出的光滑外形填充非测量点得到处理后的齿面三维形貌如图2上图所示。
齿面图像旋转:
旋转齿面图像使齿面纹理和y轴对齐,保证后续提取的渐开线轮廓线位于一个截面内,其结果如图2下图所示。
渐开线轮廓数据提取:
从表面提取垂直截面,观察区分齿渐开线、齿底倒圆所属区域轮廓线,用一条合适长度的剖面线提取属于渐开线区域内齿廓,以二维坐标点数据的形式导出渐开线轮廓曲线。
2)数据处理2:
粒子群算法拟合数据:
渐开线轮廓在直角坐标系下可用图3表示,因此易得其隐函数方程为:
采用数据处理1得到的二维坐标点p
v
c=c
其中:v
输出残差平方和最小值结果组:
一次拟合结果如图4所示,由于算法每一次运行结果相近,为寻找拟合最优结果,引入拟合残差平方和作为评判标准,因此设置好算法重复运行次数后,输出残差平方和为最小值的拟合结果。
齿轮齿形误差计算:
由渐开线发生线上线段长度等于基圆上被滚过的弧长可知,小模数渐开线齿形误差可表示为:f
- 一种小模数渐开线齿轮齿形误差测量方法
- 基于机器视觉的直齿渐开线小模数齿轮的测量方法