一种基于虚拟场景变换的智能驾驶车辆车路在环测试方法
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及智能驾驶车辆测试技术领域,特别涉及一种基于虚拟场景变换的智能驾驶车辆车路在环测试方法。
背景技术
随着智能驾驶车辆技术的发展,针对智能车辆的测试,也变得尤为重要。仿真测试和硬件在环测试虽然可以通过虚拟环境模拟出各种不同复杂度的场景,然而仿真的车辆动力学特性与真实车辆相差较大,导致其测试结果的可信度较低。寻找一种风险小、成本低、可信度高的测试方法对于快速提升智能车辆的自主水平极为重要。
现有技术的不足之处在于,传统的实际车辆测试存在着测试场景有限,测试成本高大,测试风险大、测试场地要求高等问题。
发明内容
本发明的目的克服现有技术存在的不足,为实现以上目的,采用一种基于虚拟场景变换的智能驾驶车辆车路在环测试方法,以解决上述背景技术中提出的问题。
一种基于虚拟场景变换的智能驾驶车辆车路在环测试方法,包括:
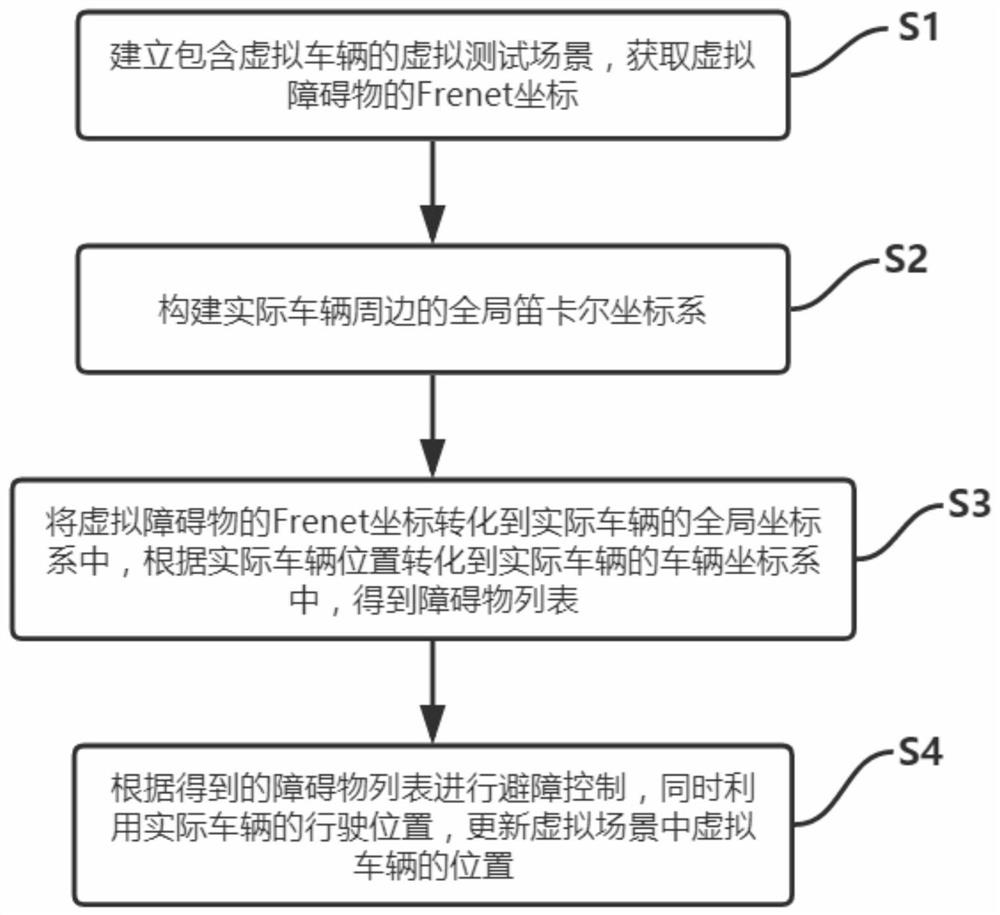
建立包含虚拟车辆的虚拟测试场景,获取虚拟障碍物的Frenet坐标;
构建实际车辆周边的全局笛卡尔坐标系;
将虚拟障碍物的Frenet坐标转化到实际车辆的全局坐标系中,根据实际车辆位置转化到实际车辆的车辆坐标系中,得到障碍物列表;
根据得到的障碍物列表进行避障控制,同时利用实际车辆的行驶位置,更新虚拟场景中虚拟车辆的位置。
作为本发明进一步的技术方案:所述建立包含虚拟车辆的虚拟测试场景,获取虚拟障碍物的Frenet坐标的具体步骤包括:
建立用于虚拟车辆测试的虚拟场景;
根据虚拟场景的虚拟传感器,获取虚拟车辆周边的虚拟障碍物在车辆坐标系下的位置坐标(x
其中,θ为虚拟车辆的航向;
根据虚拟场景中虚拟车辆以期望轨迹S
其中,(x
再根据障碍物坐标(x
作为本发明进一步的技术方案:所述构建实际车辆周边的全局笛卡尔坐标系的具体步骤包括:
构建实际车辆的全局坐标系,设定全局坐标系中的坐标原点;
获取坐标原点的经纬度信息(lat
其中,(x,y)为转化后的实际车辆直角坐标。
作为本发明进一步的技术方案:所述将虚拟障碍物的Frenet坐标转化到实际车辆的全局坐标系中,根据实际车辆位置转化到实际车辆的车辆坐标系中,得到障碍物列表的具体步骤包括:
驾驶实际车辆,采集一条实际道路期望轨迹点的GPS信息S
并且计算出每一个直角坐标点对应的距起点的轨迹长度s,得到一个实际车辆期望轨迹数组data=[x,y,s,d],其中d=0;
然后在实际车辆自主运行过程中,根据其GPS位置转化的直角坐标,向期望轨迹做垂线,在期望轨迹上,根据垂足前后的直角坐标点拟合出垂足坐标点,并计算出垂足坐标点的S
根据得到的虚拟场景下的障碍物Frenet坐标Obstacle(s,d)中的s,与数组data=[x,y,s,d]中的s进行匹配,找到数组data=[x,y,s,d]中对应点的x和y的值;
根据Obstacle(s,d)中的d求得虚拟场景下的虚拟障碍物在实际场景下的全局坐标(x
根据虚拟车辆的航向、实际车辆直角坐标(x,y)以及全局坐标(x
作为本发明进一步的技术方案:所述根据得到的障碍物列表进行避障控制,同时利用实际车辆的行驶位置,更新虚拟场景中虚拟车辆的位置的具体步骤包括:
根据计算出实际车辆的期望轨迹S
其中,s
根据试验车辆以及障碍物的位置信息,得到车辆数据信息,并进行安全性指标和舒适性指标评定。
作为本发明进一步的技术方案:所述根据试验车辆以及障碍物的位置信息,得到车辆数据信息,并进行安全性指标和舒适性指标评定的具体步骤包括:
根据试验车辆以及障碍物的位置信息,计算试验车辆和障碍物之间的距离L,以及车辆的状态信息,所述状态信息包括车辆的纵向加速度a、横摆角速度w、质心侧偏角β、方向盘转角sw、方向盘的转动角速度r,以及方向盘角加速度b;
根据上述车辆的状态信息的参数进行安全性指标和舒适性指标评定;
指标评定公式为:
总评价指标公式为:
S=K
其中,L为本车与障碍物的距离,w为车辆横摆角速度,β为车辆的质心侧偏角,sw为方向盘转角,γ
与现有技术相比,本发明存在以下技术效果:
通过采用上述的技术方案,利用在仿真系统中建立虚拟环境的虚拟车辆及虚拟障碍物信息,且能够转化成实际车辆环境下的相对障碍物信息。根据实际车辆行驶的Frenet坐标,反馈回虚拟场景,根据虚拟车辆以及实际车辆各自的Frenet坐标中的s值进行PID控制,得到虚拟车辆的期望速度,发送给虚拟车辆,从而保证虚拟车辆和试验车辆的行驶路径长度在Frenet坐标的s上的分量动态保持一致。同时虚拟环境和实际环境下两者的路径依赖性低。同时建立虚拟环境的环境检测方式,减少了对实际道路测试环境的要求和依赖,选用虚拟的障碍物测试人员及车辆无需产生损坏。使得智能车辆的测试不再受到地域限制,能利用实际场景中的有限场地完成对虚拟驾驶场景中搭建的任意尺寸复杂危险工况的实车测试。
附图说明
下面结合附图,对本发明的具体实施方式进行详细描述:
图1为本申请公开的一些实施例的智能驾驶车辆车路在环测试方法的步骤示意图;
图2为本申请公开的一些实施例的智能驾驶车辆车路在环测试方法的流程框图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参考图1和图2,本发明实施例中,一种基于虚拟场景变换的智能驾驶车辆车路在环测试方法,具体步骤包括:
S1、建立包含虚拟车辆的虚拟测试场景,获取虚拟障碍物的Frenet坐标,具体步骤包括:
首先通过仿真软件系统建立用于虚拟车辆测试的虚拟场景,根据智能车辆测试要求,完成相应场景的搭建,并且配置好对应功能的虚拟传感器,用于完成在虚拟环境中虚拟车辆行驶过程中周边障碍物信息的获取。
具体的,测试要求主要包括车辆换道避障、车辆减速避障、车辆跟车、车辆路口遇行人急停、车辆十字路口左右转以及车辆在红绿灯路口行驶等。仿真场景主要包括直道、弯道、十字路口、红绿灯、路口行人、路边停止车辆、变速行驶车辆、路上抛锚车辆等物件。以及自车上搭载的位置传感器、障碍物检测传感器等虚拟传感器。且需要对配置好的虚拟传感器的输出数据进行整合处理,以便于后续使用。
在一些具体的实施例中,获取虚拟车辆起点位置的虚拟障碍物的Frenet坐标的具体步骤包括:
根据虚拟场景的虚拟传感器,获取虚拟车辆周边的虚拟障碍物在车辆坐标系下的位置坐标(x
其中,θ为虚拟车辆的航向角;
根据虚拟场景中虚拟车辆以期望轨迹S
其中,(x
再根据上述计算得到的障碍物坐标(x
S2、构建实际车辆周边的全局笛卡尔坐标系,具体步骤包括:
构建实际车辆所在的实际环境中的全局坐标系,在实际车辆所在环境的周边选取一点,将此点设定为实际环境的全局坐标系中的坐标原点;
获取该坐标原点的经纬度信息(lat
其中,(x,y)为转化后的实际车辆直角坐标,π为圆周率。
S3、将虚拟障碍物的Frenet坐标转化到实际车辆的全局坐标系中,根据实际车辆位置转化到实际车辆的车辆坐标系中,得到障碍物列表;
具体步骤包括:
驾驶实际车辆,采集一条实际道路期望轨迹点的GPS信息S
并且计算出每一个直角坐标点对应的距起点的轨迹长度s,得到一个实际车辆期望轨迹的数组data=[x,y,s,d],其中d=0;
然后在实际车辆自主运行过程中,根据其GPS位置转化的直角坐标,向期望轨迹做垂线,在期望轨迹上,根据垂足前后的直角坐标点拟合出垂足坐标点,并计算出垂足坐标点的S
根据得到的虚拟场景下的障碍物Frenet坐标Obstacle(s,d)中的s,与上述数组data=[x,y,s,d]中的s进行匹配,并找到数组data=[x,y,s,d]中对应点的x和y的值;
根据Obstacle(s,d)中的d求得虚拟场景下的虚拟障碍物在实际场景下的全局坐标(x
根据虚拟车辆的航向、实际车辆直角坐标(x,y)以及全局坐标(x
S4、根据得到的障碍物列表进行避障控制,同时利用实际车辆的行驶位置,更新虚拟场景中虚拟车辆的位置,具体步骤包括:
根据计算出实际车辆的期望轨迹S
具体虚拟车辆的期望速度公式如下:
其中,s
根据试验车辆以及障碍物的位置信息,得到车辆数据信息,并进行安全性指标和舒适性指标评定。
在一些具体的实施例中,所述根据试验车辆以及障碍物的位置信息,得到车辆数据信息,并进行安全性指标和舒适性指标评定的具体步骤包括:
根据试验车辆以及障碍物的位置信息,计算试验车辆和障碍物之间的距离L,以及车辆的状态信息,所述状态信息包括车辆的纵向加速度a、横摆角速度w、质心侧偏角β、方向盘转角sw、方向盘的转动角速度r,以及方向盘角加速度b;
根据上述车辆的状态信息的参数进行安全性指标和舒适性指标评定;
指标评定公式为:
总评价指标公式为:
S=K
其中,L为本车与障碍物的距离,w为车辆横摆角速度,β为车辆的质心侧偏角,sw为方向盘转角,γ
根据求得的评价指数,判断出测试结果,如果指数越高,则此系统性能越优越。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定,均应包含在本发明的保护范围之内。
- 一种基于虚拟场景变换的智能驾驶车辆车路在环测试方法
- 一种车辆在环的智能驾驶车辆测试方法、车载控制装置和测试系统