一种盂肱关节仿生机构及盂肱关节角度识别方法
文献发布时间:2023-06-19 11:40:48
技术领域
本发明属于外骨骼机器人技术、主从遥操作及康复检测等领域,具体地说是一种盂肱关节仿生机构及盂肱关节角度识别方法,主要用于人体肩部盂肱关节运动信息获取及远程再现等仿生操作。
背景技术
随着工业技术的迅速发展,外骨骼机器人因具有较高的灵活性、适应性及主动避障能力,能够在一些特殊要求和环境下(如核辐射、火灾及反恐作战现场等非结构、多样化环境)通过操作人员主动参与去控制远程机械手臂顺利完成复杂的作业任务,以及主从遥操作作业方法。但现有外骨骼式主从遥操作系统中,一方面外骨骼肩部多采用简单的三轴垂直正交的结构布局方式来复现人体盂肱关节运动,该布局方式最大缺点是内旋外旋关节布置在盂肱关节上方,限制操作人员手臂的外展运动范围(≤45°),超限将造成人机碰撞,严重影响外骨骼式遥操作主手的肩部运动灵活性与可靠性;另一方面,三轴垂直正交的结构布局方式造成肩部尺寸过大,肩部轮廓兼容性差,影响穿戴舒适性。
发明内容
为了解决现有外骨骼式遥操作主手存在肩部盂肱关节运动兼容性及轮廓兼容性差等问题,本发明的目的在于提供一种盂肱关节仿生机构及盂肱关节角度识别方法。
本发明的目的是通过以下技术方案来实现的:
一种盂肱关节仿生机构,包括肩部前伸后缩固定架、外展内收固定架及位于该肩部前伸后缩固定架与外展内收固定架之间的两个球面菱形机构,其中每个球面菱形机构的四条边均为弧形,且相邻边均通过转轴转动连接,一个所述球面菱形机构的一个端点处的转轴安装于肩部前伸后缩固定架上,相对的端点与另一个所述球面菱形机构的一个端点共用一根转轴,另一个所述球面菱形机构上相对的端点处的转轴安装于外展内收固定架上;所述肩部前伸后缩固定架连接于人体大臂,所述外展内收固定架与人体背部连接。
所述两个球面菱形机构包括第一肩部短杆、第二肩部短杆、第三肩部短杆、第四肩部短杆、第一肩部长杆及第二肩部长杆,该第一肩部长杆与第二肩部长杆呈“X”形,中间通过肩部中心轴转动连接;所述第一肩部短杆的一端与第一肩部长杆的一端通过第一肩部共用转轴连接,该第一肩部短杆的另一端与所述第三肩部短杆的一端通过前伸后缩转轴连接,所述第三肩部短杆的另一端与所述第二肩部长杆的一端通过第三肩部共用转轴连接,所述第二肩部短杆的一端与第一肩部长杆的另一端通过第二肩部共用转轴连接,该第二肩部短杆的另一端与第四肩部短杆的一端通过外展内收转轴连接,所述第四肩部短杆的另一端与所述第二肩部长杆的另一端通过第四肩部共用转轴连接;所述第一肩部长杆及第二肩部长杆为两个球面菱形机构的共用杆,所述前伸后缩转轴与外展内收转轴分别安装于肩部前伸后缩固定架及外展内收固定架上。
所述肩部中心轴、前伸后缩转轴及外展内收转轴上分别安装有记录球面菱形机构各连杆在运动过程之中相对角度的编码器。
所述第一肩部长杆、第二肩部长杆的弧度相等,第一肩部短杆、第二肩部短杆、第三肩部短杆及第四肩部自短杆的弧度相等,该第一肩部长杆与第二肩部长杆的弧度是第一肩部短杆、第二肩部短杆、第三肩部短杆及第四肩部自短杆弧度的两倍。
所述第一肩部长杆与第三肩部短杆、第四肩部短杆的曲率半径相同,所述第二肩部长杆与第一肩部短杆、第二肩部短杆的曲率半径相同。
所述第一肩部共用转轴、第二肩部共用转轴、第三肩部共用转轴、第四肩部共用转轴、肩部中心轴、前伸后缩转轴及外展内收转轴(K)的回转轴线交汇于球心。
所述孟肱关节仿生机构在穿戴后,所述前伸后缩转轴的前伸后缩转轴回转轴线与人体盂肱关节前伸后缩关节轴线重合,外展内收转轴的外展内收转轴回转轴线与人体前伸后缩关节轴线重合,盂肱关节仿生机构在内旋外旋过程中的虚拟回转轴线与人体盂肱关节内旋外旋关节轴线重合,且前伸后缩转轴回转轴线、外展内收转轴回转轴线及虚拟回转轴线在初始状态相互垂直相交于球心,该球心(O)始终与人体盂肱关节运动中心重合。
所述肩部中心轴、前伸后缩转轴及外展内收转轴上分别设有用于确定盂肱关节仿生机构初始姿态的初始定位基准。
一种盂肱关节角度识别方法,包括:在人体盂肱关节处穿戴上权利要求2所述的盂肱关节仿生机构,并在所述外展内收转轴上安装第一编码器,在肩部中心轴上安装第二编码器,在前伸后缩转轴上安装第三编码器;所述第二编码器记录的角度φ
肩部内旋外旋角度为
肩部外展内收角度为
肩部前伸后缩角度为
本发明的优点与积极效果为:
1.本发明创新设计了基于球面菱形机构的仿生盂肱关节,球面菱形机构分布在人体盂肱关节外侧,可有效避免大范围外展运动中外骨骼与人体头部干涉,具备较高的运动兼容性,大幅提升肩部运动灵活性。
2.本发明的盂肱关节仿生机构为球面包裹结构,且结构简单、紧凑,重量轻,与人体盂肱关节外部轮廓兼容性强,提升穿戴舒适性。
3.本发明的关节角识别方法,可通过检测各构件运动夹角,实时获取人体盂肱关节的运动数据,用于遥操作作业任务及关节运动能力检测。
附图说明
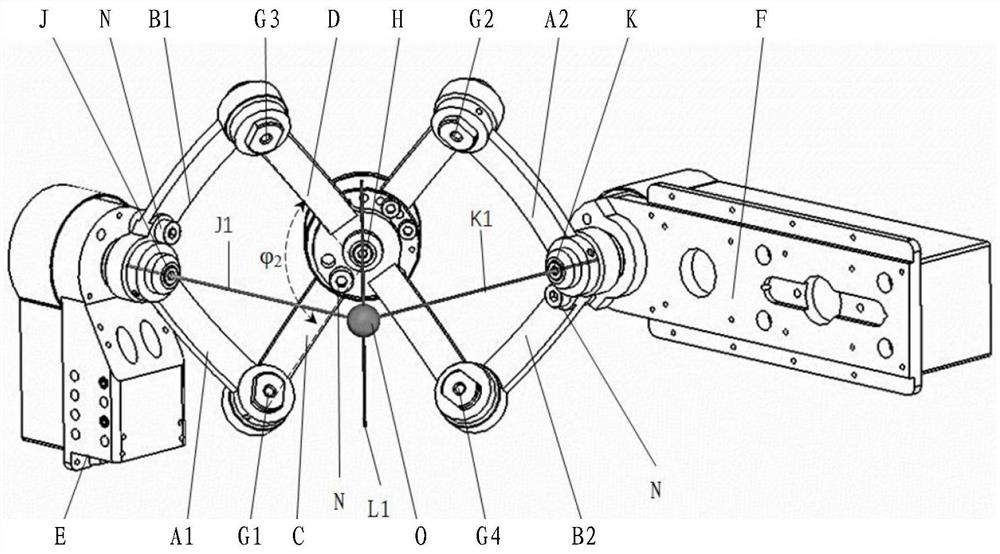
图1为本发明盂肱关节仿生机构正面的结构示意图;
图2为本发明盂肱关节仿生机构背面的结构示意图;
其中:A1为第一肩部短杆,A2为第二肩部短杆,B1为第三肩部短杆,B2为第四肩部短杆,C为第一肩部长杆,D为第二肩部长杆,E为肩部前伸后缩固定架,F为外展内收固定架,G1为第一肩部共用转轴,G2为第二肩部共用转轴,G3为第三肩部共用转轴,G4为第四肩部共用转轴,H为肩部中心轴,J为前伸后缩转轴,J1为前伸后缩转轴回转轴线,K为外展内收转轴,K1为外展内收转轴回转轴线,L1为虚拟回转轴线,M1为第一编码器,M2为第二编码器,M3为第三编码器,N为初始定位基准,O为球心。
具体实施方式
下面结合附图对本发明作进一步详述。
如图1、图2所示,本发明盂肱关节仿生机构包括肩部前伸后缩固定架E、外展内收固定架F及位于该肩部前伸后缩固定架E与外展内收固定架F之间的两个球面菱形机构,两个球面菱形机构并排设并排设置,每个球面菱形机构的四条边均为弧形,且相邻边均通过转轴转动连接,一个球面菱形机构的一个端点处的转轴安装于肩部前伸后缩固定架E上,相对的端点与另一个球面菱形机构的一个端点共用一根转轴,另一个球面菱形机构上相对的端点处的转轴安装于外展内收固定架F上;肩部前伸后缩固定架E连接于人体大臂,外展内收固定架F与人体背部连接。
本实施例的两个球面菱形机构包括第一肩部短杆A1、第二肩部短杆A2、第三肩部短杆B1、第四肩部短杆B2、第一肩部长杆C及第二肩部长杆D,四个肩部短杆及两个肩部长杆均为弧形杆,且均向同一侧弯曲;第一肩部长杆C与第二肩部长杆D呈“X”形,中间通过肩部中心轴H转动连接;第一肩部短杆A1的一端与第一肩部长杆C的一端通过第一肩部共用转轴G1连接,该第一肩部短杆A1的另一端与第三肩部短杆B1的一端通过前伸后缩转轴J连接,第三肩部短杆B1的另一端与第二肩部长杆D的一端通过第三肩部共用转轴G3连接,第二肩部短杆A2的一端与第一肩部长杆C的另一端通过第二肩部共用转轴G2连接,该第二肩部短杆A2的另一端与第四肩部短杆B2的一端通过外展内收转轴K连接,第四肩部短杆B2的另一端与第二肩部长杆D的另一端通过第四肩部共用转轴G4连接;第一肩部长杆C及第二肩部长杆D作为两个球面菱形机构的共用杆,其余四个肩部短杆之间以及肩部短杆与肩部长杆之间均通过相同的方式连接,即采用转轴转动连接,各个转轴均通过轴承与肩部短杆或肩部长杆完成连接;前伸后缩转轴J与外展内收转轴K分别安装于肩部前伸后缩固定架E及外展内收固定架F上。本实施例在外展内收转轴K上安装第一编码器M1,在肩部中心轴H上安装第二编码器M2,在前伸后缩转轴J上安装第三编码器M3;肩部中心轴H、前伸后缩转轴J及外展内收转轴K上分别设有用于确定盂肱关节仿生机构初始姿态的初始定位基准N,本实施例的初始定位基准N采用螺钉与螺孔配合确定盂肱关节仿生机构的初始状态。
本实施例的第一肩部长杆C、第二肩部长杆D的弧度相等,第一肩部短杆A1、第二肩部短杆A2、第三肩部短杆B1及第四肩部自短杆B2的弧度相等,该第一肩部长杆C与第二肩部长杆D的弧度是第一肩部短杆A1、第二肩部短杆A2、第三肩部短杆B1及第四肩部自短杆B2弧度的两倍。第一肩部长杆C与第三肩部短杆B1、第四肩部短杆B2的曲率半径相同,第二肩部长杆D与第一肩部短杆A1、第二肩部短杆A2的曲率半径相同。
本实施例的第一肩部共用转轴G1、第二肩部共用转轴G2、第三肩部共用转轴G3、第四肩部共用转轴G4、肩部中心轴H、前伸后缩转轴J及外展内收转轴K的回转轴线交汇于球心O。孟肱关节仿生机构在穿戴后,前伸后缩转轴J的前伸后缩转轴回转轴线J1与人体盂肱关节前伸后缩关节轴线重合,外展内收转轴K的外展内收转轴回转轴线K1与人体前伸后缩关节轴线重合,盂肱关节仿生机构在内旋外旋过程中的虚拟回转轴线L1与人体盂肱关节内旋外旋关节轴线重合,且前伸后缩转轴回转轴线J1、外展内收转轴回转轴线K1及虚拟回转轴线L1在初始状态相互垂直相交于球心O,该球心O始终与人体盂肱关节运动中心重合。本实施例的盂肱关节仿生机构具有球面包裹结构,与人体盂肱关节外部轮廓兼容性强;同时球面菱形机构分布在人体盂肱关节外侧,可有效避免传统外骨骼大范围外展内收运动中人机干涉。
本发明盂肱关节角度识别方法为:
在人体盂肱关节处穿戴上盂肱关节仿生机构,并在外展内收转轴K上安装第一编码器M1,在肩部中心轴H上安装第二编码器M2,在前伸后缩转轴J上安装第三编码器M3;第二编码器M2记录的角度φ
肩部内旋外旋角度为
肩部外展内收角度为
肩部前伸后缩角度为
通过实时记录球面菱形机构中肩部短杆、肩部长杆在运动过程之中相对角度,并利用关节角度识别算法可实时获取人体盂肱关节的运动数据。
- 一种盂肱关节仿生机构及盂肱关节角度识别方法
- 一种盂肱关节仿生助力柔性外骨骼机构