飞轮车骑乘动作的感测与回馈系统及其方法
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及一种飞轮车骑乘动作的感测与回馈系统及其方法。
背景技术
飞轮车(spinning bike)运动中,使用者往往为了挑战自我极限,将阻力调整过大,在过长的运动时间内超出自己肌肉所能承受的力量,导致身体必须使用其他部位的肌肉进行代偿,而在不良的姿势下进行运动,因此造成了运动伤害。
在现有的技术中的运动回馈装置,仅能在使用者发生不良姿势时给予警告,且仅提供单一的检测阈值,当检测阈值设置过低时容易因频繁发送的警示影响训练的情况,而检测阈值设置过高时则使得运动伤害发生的机会增加,导致使用者在没有专门人员协助时,难以进行自我训练的窘境。
发明内容
本发明提供一种飞轮车骑乘动作的感测与回馈系统及其方法,通过分析使用者的多个历史记录,达到提前预测并发出警示的效果。
根据本发明公开内容的一实施例,提供一种飞轮车骑乘动作的感测与回馈系统,包含:至少一影像传感器,设置于一使用者与该使用者骑乘的飞轮车的后方,用以检测该使用者的多个下肢关节点;一存储装置,存储该使用者的多个历史记录;一处理器,根据该些下肢关节点的检测记录,计算该飞轮车的车轮的转速,再根据该飞轮车的车轮的该转速、飞轮车的车轮的转动阻力、以及该使用者的骑乘时间,计算该使用者的一功率消耗,其中该处理器还包含一分析模型,该分析模型根据该使用者的该些历史记录,分析得出多个功率阈值,该处理器并比较该功率消耗与该些功率阈值;一警示器,当该功率消耗接近该些功率阈值的其中之一时,发出警示。
根据本发明公开内容的一实施例,提供一种飞轮车骑乘动作的感测与回馈方法,包含:检测骑乘于飞轮车的一使用者的多个下肢关节点;根据该些下肢关节点的检测记录,计算该飞轮车的车轮的转速;根据该飞轮车的车轮的该转速、该飞轮车的车轮的转动阻力、以及该使用者的骑乘时间,计算该使用者的一功率消耗;利用一分析模型,根据该使用者的多个历史记录,分析得出多个功率阈值;比较该功率消耗与该些功率阈值,当该功率消耗接近该些功率阈值的其中之一时,即发出警示。
附图说明
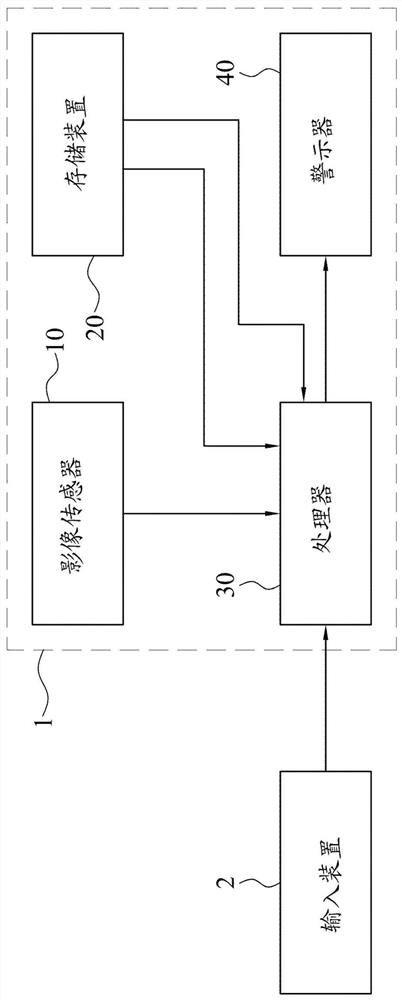
图1为本发明一实施例的飞轮车骑乘动作的感测与回馈系统的示意图;
图2为本发明一实施例的飞轮车骑乘动作的感测与回馈系统的应用示意图;
图3为本发明一实施例中检测的下肢关节点的示意图;
图4为本发明一实施例的飞轮车骑乘动作的感测与回馈系统的流程图;
图5为本发明一实施例中的使用者历史记录之一的示意图;
图6为图5中的使用者历史记录进行对比放大程序后的示意图;
图7为图6中的使用者历史记录进行噪声滤除程序后的示意图。
符号说明
1:飞轮车骑乘动作的感测与回馈系统
2:输入装置
10:影像传感器
20:存储装置
30:处理器
40:警示器
S:飞轮车
U:使用者
R:后方区域
L:下肢关节点
H:髋关节点
K:膝关节点
A:踝关节点
100、200、300、400、500:步骤
T1、T2、T3:歪斜门槛值(歪斜阈值)
P1、P2、P3、P4、P5:功率阈值
具体实施方式
以下是参照所附的附图详细叙述本发明的实施例。附图中相同的标号是用以标示相同或类似的部分。需注意的是,附图已简化以利清楚说明实施例的内容,附图上的尺寸比例并非按照实际比例绘制,因此并非作为限缩本发明保护范围之用。
图1绘示本发明一实施例的飞轮车骑乘动作的感测与回馈系统1的示意图。感测与回馈系统1包含影像传感器10、存储装置20、处理器30、以及警示器40。在使用者骑乘飞轮车进行运动时,影像传感器10检测使用者的多个下肢关节点L,并将检测结果传送至处理器30进行运算处理,以获得使用者在骑乘飞轮车进行运动时,该飞轮车的车轮的转速。处理器30再从外部的输入装置2接收飞轮车的车轮的转动阻力,以根据飞轮车的车轮的转速与转动阻力、以及使用者的运动时间,计算使用者的功率消耗。处理器30再根据存储装置20所存储的使用者历史记录进行运算分析,以获得多个功率阈值。处理器30依据使用者的功率消耗与该些功率阈值进行比较,当使用者的功率消耗与该些功率阈值的其中之一接近时,则通过警示器40发出警示。功率消耗(K)的计算例如可依据公式
其中,影像传感器10在每一时间间隔对使用者的多个下肢关节点L进行检测,时间间隔可由使用者自行调整,例如是1秒。使用者的每一个历史记录中,包含多个消耗功率对应于歪斜角度的记录,该歪斜角度为使用者骑乘飞轮车时,所检测到的下肢关节点Y相较于正常运动状态的下肢关节点位置的偏移角度,正常运动状态的下肢关节点位置可由使用者进行设定、或是由影像传感器10自动检测使用者骑乘飞轮车前静止时的下肢关节点位置,以进行设定。使用者历史记录中记录的各个歪斜角度,可以根据至少一歪斜门槛值,用以判断使用者骑乘飞轮机时的歪斜程度,例如,当歪斜角度为15度时为轻度歪斜、当歪斜角度为30度时为中度歪斜、以及当歪斜角度为45度时为重度歪斜。其中,歪斜门槛值的设定可根据使用者的需求进行个别调整,故本发明并不以本实施例的公开为限。
如前段所述,使用者的每一个历史记录中,包含多个消耗功率对应于歪斜角度的记录,处理器30将使用者的历史记录之一与多个歪斜门槛值比对后,即可得出使用者在该次历史记录中,发生轻度歪斜、中度歪斜、以及重度歪斜时所进行的功率消耗,并进行标记。处理器30包含一分析模型,将使用者的每一笔历史记录统合分析,以获得多个功率阈值,该些功率阈值分别代表了使用者在达到多少的消耗功率后,容易密集发生轻度歪斜、中度歪斜、以及重度歪斜的状况。其中,该分析模型例如是基于一卷积神经网络(ConvolutionalNeural Network,CNN)模型。
在本实施例中,处理器30可还包含一对比放大模块与一噪声滤除模块,用来对使用者的历史记录进行一前处理程序。存储装置20可还包含至少一预设功率阈值,当使用者初次使用本发明的感测与回馈系统1,使用者的历史记录为空白时,处理器30可根据预设功率阈值与功率消耗的比较结果,在功率消耗接近预设功率阈值时,通过警示器40发出警示。
在本实施例中,输入装置2设置于飞轮车上,输入装置2直接将飞轮车的车轮被设定的转动阻力,通过无线传输的方式,提供给感测与回馈系统1的处理器30,以降低运算误差。在其他实施例中,输入装置2也可以例如是键盘、PDA、手机、或是任何感测装置,通过无线或是有线的方式,连接至本发明的感测与回馈系统1,以感测或直接输入的方式,传输飞轮车的车轮的转动阻力以供本发明的飞轮车骑乘动作的感测与回馈系统1进行运算分析,本发明并不以此实施例公开内容为限。
在本实施例中,感测与回馈系统1中存储装置20、处理器30、以及警示器40整合于单一的实体装置中,例如是手机,影像传感器10则通过无线传输的方式连接至存储装置20、处理器30、以及警示器40。在其他实施例中,影像传感器10、存储装置20、处理器30、以及警示器40也可全部整合于单一的实体装置,或是分别设置于不同的实体位置,再通过无线或有线的方式进行连接,本发明并不以此实施例公开内容为限。
在本实施例中,警示器40是手机中的扬声器,但在其他实施例中,警示器40也可以例如是铃铛、发光元件、震动元件、或是任何能发出信号给使用者以达到警示效果的装置,故本发明并不以此实施例公开内容为限。
图2绘示本发明一实施例的飞轮车骑乘动作的感测与回馈系统1的应用示意图。当使用者U骑乘于飞轮机S进行运动时,感测与回馈系统1的影像传感器10则设置于飞轮机S的后方区域R,以检测使用者的多个下肢关节点L。飞轮机S的后方区域R不限制于飞轮机S的正后方,任何在飞轮机S侧后方且便于检测骑乘于飞轮机S的使用者U的多个下肢关节点L的位置,均可归类为飞轮机S的后方区域R。在本实施例中,影像传感器10的数量为1个,设置于使用者U骑乘的飞轮机S的正后方。在其他实施例中,影像传感器10的数量也可以是多个,同时设置在后方区域R的任何位置,以利由不同的角度进行检测,故本发明并不以此实施例公开内容为限。
图3绘示本发明一实施例中检测的下肢关节点L的示意图。在本实施例中,下肢关节点L至少包含髋关节点H,并可还包含膝关节点K与踝关节点A。在其他实施例中,下肢关节点L还可还包含足尖点(未绘示),故本发明并不以此实施例公开内容为限。本发明的感测与回馈系统1的影像传感器10检测下肢关节点L的运动轨迹并传送至处理器30,处理器30除了可根据检测记录计算出飞轮机S的车轮的转速,也可根据检测记录,判断使用者U骑乘飞轮机S时是否有发生动作歪斜的状况。
图4绘示本发明一实施例的飞轮车骑乘动作的感测与回馈方法流程图。首先,在步骤100中,检测骑乘于飞轮车的一使用者的多个下肢关节点Y。接着,在步骤200中,根据下肢关节点Y的检测记录,计算飞轮车的车轮的转速。然后,在步骤300中,根据飞轮车的车轮的转速与飞轮车的车轮的阻力,计算使用者的功率消耗。进而在步骤400中,利用一分析模型,根据使用者的多个历史记录,分析得出多个功率阈值。最后,在步骤500中,比较使用者的功率消耗与多个功率阈值,当使用者的功率消耗接近该些功率阈值的其中之一时,即发出警示。
其中,检测使用者的多个下肢关节点L在每一时间间隔进行,时间间隔可由使用者自行调整,例如是1秒。使用者的每一个历史记录中,包含多个消耗功率对应于歪斜角度的记录,该歪斜角度为使用者骑乘飞轮车时,所检测到的下肢关节点Y相较于正常运动状态的下肢关节点的偏移角度,正常运动状态的下肢关节点位置可由使用者进行设定、或是根据使用者骑乘飞轮车前静止时所检测到的下肢关节点位置,以进行正常运动状态的下肢关节点位置设定。使用者历史记录中记录的各个歪斜角度,可以根据至少一歪斜门槛值,用以判断使用者骑乘飞轮机时的歪斜程度,例如,当歪斜角度为15度时为轻度歪斜、当歪斜角度为30度时为中度歪斜、以及当歪斜角度为45度时为重度歪斜。其中,歪斜门槛值的设定可根据使用者的需求进行个别调整,故本发明并不以本实施例的公开为限。
如前段所述,使用者的每一个历史记录中,包含多个消耗功率对应于歪斜角度的记录,将使用者的历史记录之一与多个歪斜门槛值比对后,即可得出使用者在该次历史记录中,发生轻度歪斜、中度歪斜、以及重度歪斜时所进行的功率消耗,并进行标记。进而如步骤400中所述,根据一分析模型,将使用者的每一笔历史记录统合分析,以获得多个功率阈值,该些功率阈值分别代表了使用者在达到多少的消耗功率后,容易密集发生轻度歪斜、中度歪斜、以及重度歪斜的状况。其中,该分析模型例如是基于一卷积神经网络(Convolutional Neural Network,CNN)模型。
在本实施例中,在步骤400之前,可还包含对使用者的历史记录进行一前处理程序,前处理程序包含一对比放大程序与一噪声滤除程序。在步骤500中,当使用者初次使用本发明的感测与回馈系统1,使用者的历史记录为空白时,可根据一预设功率阈值与功率消耗的比较结果,在功率消耗接近预设功率阈值时发出警示。
图5至图7绘示本发明一实施例中的使用者历史记录之一进行前处理程序的示意图。其中,图5绘示本发明一实施例中的使用者历史记录之一的示意图。在图5中,消耗功率在水平轴由左至右增加,歪斜角度在垂直轴由下至上增加,其中,其中,歪斜角度T1设定为轻度歪斜的歪斜角度,歪斜角度T2设定为中度歪斜的歪斜角度,歪斜角度T3设定为重度歪斜的歪斜角度。
图6绘示图5中的使用者历史记录进行对比放大程序后的示意图。在进行对比放大程序后,原先在图5中高于歪斜角度T3的记录可较为显著的被辨认出。图7绘示图6中的使用者历史记录进行噪声滤除程序后的示意图。在进行噪声滤除程序后,歪斜角度未大于T3的记录被滤除。在使用者历史记录完成前处理程序后,仅包含多个消耗功率P1至P5对应于歪斜角度的记录。在本实施例中,前处理程序是以歪斜角度T3为基准进行对比放大与噪声滤除,在其他实施例中,也可以其他歪斜角度为基准进行滤除,或仅择一进行噪声滤除程序与对比放大程序,故本发明的感测与回馈方法不以本实施例的公开为限。
综上所述,本发明所提供的飞轮车骑乘运动的感测与回馈方法,通过整合分析使用者的多个历史记录,能有效得出符合使用者体能状态的多个功率阈值,并在使用者进行飞轮车骑乘运动消耗功率接近各功率阈值时发出警示提醒,以达到提前警示以预防运动伤害发生的效果。
虽然结合以上实施例公开公开了本发明,然而其并非用以限定本发明。本发明所属技术领域中具有通常知识者,在不脱离本发明的精神和范围内,可作各种的更动与润饰。因此,本发明的保护范围应当以附上的权利要求所界定的为准。
- 飞轮车骑乘动作的感测与回馈系统及其方法
- 飞轮车骑乘动作的感测与回馈系统及其方法