交流旋转电机的控制装置
文献发布时间:2023-06-19 11:44:10
技术领域
本申请涉及交流旋转电机的控制装置。
背景技术
为了改善效率·提高输出,交流旋转电机的控制装置可能控制为施加至3相的绕组的施加电压的振幅超过电源电压的一半值的过调制状态。另一方面,若被控制为过调制状态,则变为施加到绕组的施加电压中包含有高次谐波分量,并且变为电源电流中也包含有高次谐波分量。另外,在逆变器与直流电源相连接的电源连接路径上,如果由逆变器的平滑电容器形成LC谐振电路,电源电流的高次谐波分量的频率与电源连接路径的谐振频率相一致,则电源电流的高次谐波分量被放大,从而可能对直流电源和与直流电源连接的其他装置造成不良影响。
在专利文献1的技术中,设置有对被提供至逆变器的电源电压进行升压的升压转换器,在谐振区域中,由升压转换器对电源电压进行升压,由此,进行控制,以使电源电压相对于施加到3相的绕组的施加电压的振幅而增加,以不处于过调制状态。
现有技术文献
专利文献
专利文献1:专利第5760934号公报
发明内容
发明所要解决的技术问题
然而,专利文献1的技术无法适应不具备升压转换器的交流旋转电机。因此,认为在不具备升压转换器的交流旋转电机中,若应用专利文献1的技术,则变为在谐振区域中无法进行转矩输出。
因此,希望有一种交流旋转电机的控制装置,该交流旋转电机的控制装置可通过电源连接路径的谐振电路,来抑制在过调制状态下所产生的电源电流的高次谐波分量被放大的情况,并且使转矩输出,而不使电源电压升压。
用于解决技术问题的技术手段
本申请所涉及的交流旋转电机的控制装置为经由具有平滑电容器的逆变器、来对具有设置了多个相的绕组的定子和转子的交流旋转电机进行控制的交流旋转电机的控制装置,包括:
电流检测部,该电流检测部检测流过所述多个相的绕组的电流;
旋转检测部,该旋转检测部检测或推定所述转子的旋转角速度;
电压检测部,该电压检测部对从直流电源被提供至所述逆变器的电源电压进行检测;
目标调制率设定部,该目标调制率设定部对所述多个相的绕组的施加电压的基波分量的振幅相对于所述电源电压的一半值的比率即调制率的目标值进行设定;
电流指令值计算部,该电流指令值计算部基于所述调制率的目标值,来设定电流指令值;
电压指令值计算部,该电压指令值计算部使施加至所述多个相的绕组的多个相的电压指令值变化,以使电流的检测值接近所述电流指令值;以及
开关控制部,该开关控制部基于所述多个相的电压指令值,使所述逆变器所具有的多个开关元件导通截止,并且将电压施加至所述多个相的绕组,
在与电源电流的高次谐波分量由于在将所述直流电源与所述逆变器相连接的电源连接路径中所产生的谐振而导致增大的运行区域相对应地设定的特定过调制运行区域中,所述目标调制率设定部使所述调制率的目标值的最大设定值比所述特定过调制运行区域以外的过调制的运行区域要低,该电源电流的高次谐波分量因所述多个相的电压指令值的振幅超过所述电源电压的一半值的过调制而产生。
发明效果
根据本申请所涉及的交流旋转电机的控制装置,在与因电源连接路径的谐振而导致电源电流的高次谐波分量增大的运行区域相对应地设定的特定过调制运行区域中,可以使调制率的目标值低于该特定过调制运行区域以外的过调制的运行区域,并且基于调制率的目标值来设定电流指令值。因此,可以在谐振区域中使调制率降低,抑制电源电流的高次谐波分量变大,并使转矩输出,而不使电源电压升压。
附图说明
图1是表示实施方式1所涉及的交流旋转电机和交流旋转电机的控制装置的概要结构图。
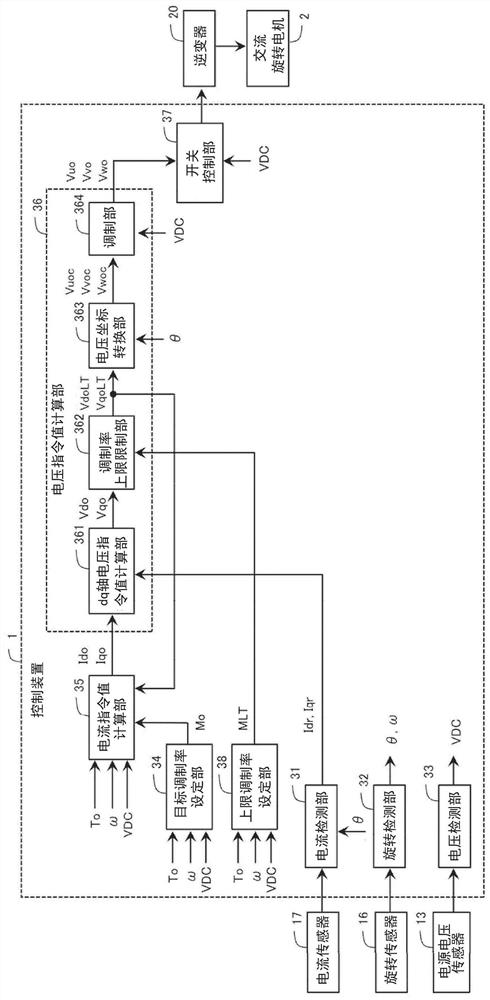
图2是表示实施方式1所涉及的交流旋转电机的控制装置的概要框图。
图3是表示实施方式1所涉及的交流旋转电机的控制装置的硬件结构框图。
图4是说明实施方式1所涉及的过调制状态的图。
图5是说明实施方式1所涉及的电源连接路径的谐振电路的图。
图6是示出实施方式1所涉及的电源连接路径的频率特性的图。
图7是说明实施方式1所涉及的因谐振而导致的电源电流的高次谐波分量的振幅的增加的图。
图8是说明实施方式1所涉及的调制率的目标值的设定的图。
图9是说明实施方式1所涉及的调制率的目标值的设定的图。
图10是实施方式1所涉及的电流指令值计算部的框图。
图11是实施方式1所涉及的电流指令值计算部的反馈控制器的框图。
图12是说明实施方式1所涉及的调制率的上限限制值的设定的图。
图13是说明实施方式1所涉及的调制率的上限限制值的设定的图。
图14是说明实施方式1所涉及的不进行调制率的上限限制的情况下的调制率的控制举动的时序图。
图15是说明实施方式1所涉及的进行调制率的上限限制的情况下的调制率的控制举动的时序图。
图16是说明实施方式1所涉及的调制率的上限限制的处理的图。
图17是说明实施方式2所涉及的目标调制率设定部和上限调制率设定部的框图。
图18是说明实施方式2所涉及的调制率的目标值和调制率的上限限制值的图。
具体实施方式
1.实施方式1
参照附图对实施方式1所涉及的交流旋转电机的控制装置1(以下简称为控制装置1)进行说明。图1是本实施方式所涉及的交流旋转电机2和控制装置1的概要结构图。
1-1.交流旋转电机
交流旋转电机2具有设置有多个相的绕组的定子和转子。在本实施方式中,设置U相、V相、W相这3相的绕组Cu、Cv、Cw。3相绕组Cu、Cv、Cw设为星形接线。另外,3相绕组也可设为三角形接线。交流旋转电机2设为永磁体式的同步旋转电机,在转子中设置有永磁体。
交流旋转电机2具备输出与转子的旋转角度相对应的电信号的旋转传感器16。旋转传感器16设为霍尔元件、编码器、或旋转变压器等。旋转传感器16的输出信号被输入到控制装置1。
1-2.逆变器等
逆变器20是在直流电源10与3相绕组之间进行功率转换的功率转换器,具有多个开关元件。逆变器20中,与3相各相的绕组相对应地,设置与直流电源10的正极侧相连接的正极侧的开关元件23H(上臂)和与直流电源10的负极侧相连接的负极侧的开关元件23L(下臂)串联连接的3个串联电路(腿)。逆变器20具备3个正极侧的开关元件23H、和3个负极侧的开关元件23L的合计6个开关元件。然后,正极侧的开关元件23H和负极侧的开关元件23L串联连接的连接点与相对应的相的绕组相连接。
具体而言,在各相的串联电路中,正极侧的开关元件23H的集电极端子与正极侧电线14相连接,正极侧的开关元件23H的发射极端子与负极侧的开关元件23L的集电极端子相连接,负极侧的开关元件23L的集电极端子与负极侧的电线15相连接。然后,正极侧的开关元件23H和负极侧的开关元件23L的连接点与相对应的相的绕组相连接。在开关元件中,使用了反向并联连接有二极管22的IGBT(Insulated Gate Bipolar Transistor:绝缘栅双极型晶体管)或具有反向并联连接的二极管的功能的MOSFET(Metal Oxide SemiconductorField Effect Transistor:金属氧化物半导体场效应晶体管)等。各开关元件的栅极端子与控制装置1相连接。各开关元件根据从控制装置1输出的控制信号而被导通或截止。
平滑电容器12连接于正极侧电线14与负极侧电线15之间。具备对从直流电源10提供至逆变器20的电源电压进行检测的电源电压传感器13。电源电压传感器13连接于正极侧电线14与负极侧电线15之间。电源电压传感器13的输出信号被输入到控制装置1。
电流传感器17输出与流过各相的绕组的电流相对应的电信号。在将开关元件的串联电路与绕组相连的各相的电线上,具备电流传感器17。电流传感器17的输出信号被输入到控制装置1。另外,在各相的串联电路上也可以具备电流传感器17。
在直流电源10中,使用有能够充放电的蓄电装置(例如,锂离子电池、镍氢电池、双电层电容器)。另外,在直流电源10中,也可以设置有对直流电压进行升压或者降压的直流功率转换器即DC-DC转换器。
1-3.控制装置
控制装置1经由逆变器20控制交流旋转电机2。如图2所示,控制装置1包括后文叙述的电流检测部31、旋转检测部32、电压检测部33、目标调制率设定部34、电流指令值计算部35、电压指令值计算部36、开关控制部37、以及上限调制率设定部38等。控制装置1的各功能由控制装置1所具备的处理电路来实现。具体地,如图3所示,作为处理电路,控制装置1包括CPU(Central Processing Unit:中央处理单元)等运算处理装置90(计算机)、与运算处理装置90进行数据交换的存储装置91、将外部的信号输入到运算处理装置90的输入电路92、以及将信号从运算处理装置90输出到外部的输出电路93等。
作为运算处理装置90,也可以包括ASIC(Application Specific IntegratedCircuit:专用集成电路)、IC(Integrated Circuit:集成电路)、DSP(Digital SignalProcessor:数字信号处理器)、FPGA(Field Programmable Gate Array:现场可编程门阵列)、各种逻辑电路、以及各种信号处理电路等。此外,作为运算处理装置90,也可以包括多个相同种类或多个不同种类的运算处理装置,分担并执行各处理。作为存储装置91,包括被构成为能够从运算处理装置90读取数据及对运算处理装置90写入数据的RAM(RandomAccess Memory:随机存取存储器)、被构成为能够从运算处理装置90读取数据的ROM(ReadOnly Memory:只读存储器)等。在输入电路92中,连接有电源电压传感器13、电流传感器17、旋转传感器16等各种传感器、开关,并且包括将这些传感器、开关的输出信号输入到运算处理装置90的A/D转换器等。在输出电路93中,连接有对开关元件进行导通截止驱动的栅极驱动电路等电负载,并且包括将控制信号从运算处理装置90输出到这些电负载的驱动电路等。
然后,通过运算处理装置90执行被存储于ROM等存储装置91中的软件(程序),并且与存储装置91、输入电路92、以及输出电路93等控制装置1的其他软件进行联动,从而实现控制装置1所具备的图2的各控制部31~38等的各功能。另外,各控制部31~38等所使用的调制率的目标值、调制率的上限限制值等设定数据作为软件(程序)的一部分,被存储于ROM等存储装置91中。以下,对控制装置1的各功能进行详细说明。
<旋转检测部32>
旋转检测部32检测电气角下的转子的磁极位置θ(转子的旋转角度θ)和旋转角速度ω。在本实施方式中,旋转检测部32基于旋转传感器16的输出信号,检测转子的磁极位置θ(旋转角度θ)和旋转角速度ω。在本实施方式中,磁极位置被设定成朝向设置在转子的永磁体的N极。另外,旋转检测部32也可以构成为,基于通过使高次谐波分量与电流指令值重叠而得到的电流信息等,在不使用旋转传感器的情况下,推定旋转角度(磁极位置)(所谓的无传感器方式)。
<电压检测部33>
电压检测部33检测从直流电源10被提供至逆变器20的电源电压VDC。在本实施方式中,电压检测部33基于电源电压传感器13的输出信号,检测电源电压VDC。
<电流检测部31>
电流检测部31检测流过3相的绕组的电流Iur、Ivr、Iwr。在本实施方式中,电流检测部31基于电流传感器17的输出信号,检测从逆变器20流过各相的绕组Cu、Cv、Cw的电流Iur、Ivr、Iwr。这里,Iur是U相的电流检测值,Ivr是V相的电流检测值,Iwr是W相的电流检测值。另外,也可以电流传感器17构成为检测2相的绕组电流,剩余1相的绕组电流基于2相的绕组电流的检测值来计算。例如,电流传感器17检测V相和W相的绕组电流Ivr、Iwr,相的绕组电流Iur可以通过Iur=-Ivr-Iwr来计算。
电流检测部31将3相的电流检测值Iur、Ivr、Iwr转换为d轴和q轴的旋转坐标系上的d轴的电流检测值Idr和q轴的电流检测值Iqr。d轴和q轴的旋转坐标系是由在检测出的磁极位置θ的方向上确定的d轴、和在电气角上比d轴前进90°的方向上确定的q轴构成的2个轴的旋转坐标,与转子的磁极位置的旋转同步地进行旋转。具体而言,电流检测部31基于磁极位置θ来对3相的电流检测值Iur、Ivr、Iwr进行3相2相转换和旋转坐标转换,以转换为d轴的电流检测值Idr和q轴的电流检测值Iqr。
<电流指令值计算部35>
电流指令值计算部35计算电流指令值。在本实施方式中,电流指令值计算部35计算d轴的电流指令值Ido和q轴的电流指令值Iqo。对于电流指令值计算部35的处理的详细情况,将在后文叙述。
<电压指令值计算部36>
电压指令值计算部36使施加至3相的绕组的3相的电压指令值Vuo、Vvo、Vwo变化,以使电流的检测值接近电流指令值。在本实施方式中,电压指令值计算部36具备dq轴电压指令值计算部361、调制率上限限制部362、电压坐标转换部363以及调制部364。
dq轴电压指令值计算部361进行通过PI控制等来使d轴的电压指令值Vdo和q轴的电压指令值Vqo变化的电流反馈控制,以使得d轴的电流检测值Idr接近d轴的电流指令值Ido,q轴的电流检测值Iqr接近q轴的电流指令值Iqo。另外,也可以进行用于防止d轴电流与q轴电流的干扰等的反馈控制。
调制率上限限制部362对于dq轴的电压指令值Vdo、Vqo进行后文叙述的调制率的上限限制处理,并且对限制后的d轴的电压指令值VdoLT和限制后的q轴的电压指令值VqoLT进行计算。
电压坐标转换部363基于磁极位置θ来对限制后的dq轴的电压指令值VdoLT、VqoLT进行固定坐标转换和2相3相转换,从而转换为坐标转换后的3相的电压指令值Vuoc、Vvoc、Vwoc。该坐标转换后的3相的电压指令值Vuoc、Vvoc、Vwoc变为正弦波,相当于3相的电压指令值或3相的绕组的施加电压的基波分量。
调制部364对正弦波的坐标转换后的3相的电压指令值Vuoc、Vvoc、Vwoc施加振幅减少调制,从而计算最终的3相的电压指令值Vuo、Vvo、Vwo。调制部364在至少坐标转换后的3相的电压指令值的调制率M变为比1大时,对于坐标转换后的3相的电压指令值,维持3相的电压指令值的线间电压,并增加将3相的电压指令值的振幅减少的振幅减少调制。
如下式所示,坐标转换后的3相的电压指令值的调制率M为作为基波分量的坐标转换后的3相的电压指令值的振幅VA相对于电源电压VDC的一半值的比率。另外,调制率M也是3相的绕组的施加电压或调制后的3相的电压指令值的基波分量的振幅VA相对于电源电压VDC的一半值的比率。
M=VA×2/VDC···(1)
如以下说明的那样,在本实施方式中,由于进行振幅减少调制,因而在调制率M为1.15以下时,变为通常调制状态,不使6次高次谐波分量与流过逆变器的逆变器电流重叠,在调制率大于1.15时,变为过调制状态,逆变器电流的6次高次谐波分量重叠,随着调制率M增加,电源电流的6次高次谐波分量增加。
1)M≦1.15的情况
通常调制状态,不存在逆变器电流的6次高次谐波分量
2)M>1.15的情况
过调制状态,存在逆变器电流的6次高次谐波分量
在图4中示出了旋转角速度ω和转矩指令值To与控制区域之间的关系。在旋转角速度ω较低的区域中,调制率M在1以下,因此,变为通常调制状态。如果旋转角速度ω增加,则调制率M大于1,变为1.15以下。然而,在存在振幅减少调制的情况下,保持在通常调制状态不变。如果旋转角速度ω进一步增加,则调制率M大于1.15,变为1.27(在本例中,为1.21以下)。在该情况下,即便存在振幅减少调制,也变为过调制状态。另外,在相同的转矩指令值To下,随着旋转角速度ω增加到基本转速,调制率M增加。在不进行后文叙述的最大调制率降低设定的情况下,在比基本转速要高的旋转角速度ω下,调制率M为恒定值(图10的电流设定数据被设定成使得调制率M变为恒定值)。
<通常调制状态(M≦1)>
在调制率M为1以下的情况下,即使施加调制,也不会发生坐标转换后的3相的电压指令值的振幅超过电源电压VDC的一半值的电压饱和,变为通常调制状态。另外,即使在调制率M为1以下的情况下,为了减少开关损耗的目的等,也可以施加后文叙述的2相调制等调制。
<通过振幅减少调制而得到的通常调制状态(1<M≦1.15)>
在不施加调制的情况下,如果调制率M变为比1要大,则发生坐标转换后的3相的电压指令值的振幅超过电源电压VDC的一半值的电压饱和,变为过调制状态。如果变为过调制状态,那么高次谐波分量与施加电压的线间电压重叠,产生转矩脉动分量、逆变器电流的高次谐波分量。
另一方面,通过施加振幅减少调制,直到调制率M变为比2/√3(≒1.15)要大为止,发生振幅减少调制后的3相的电压指令值的振幅超过电源电压VDC的一半值的电压饱和,变为通常调制状态。在振幅减少调制的方式中,使用有3次高次谐波重叠、min-max法(伪3次高次谐波重叠)、2相调制、以及梯形波调制等公知的各种方式。3次高次谐波重叠是使3次高次谐波与坐标转换后的3相的电压指令值重叠的方式。min-max法是使坐标转换后的3相的电压指令值的中间电压的1/2与坐标转换后的3相的电压指令值重叠的方式。2相调制是将任1相的电压指令值固定成0或电源电压VDC,并且以使得坐标转换后的3相的电压指令值的线间电压不变化的方式来使其他2相变化。
<过调制状态(1.15<M≦1.27)>
另一方面,如果调制率M变为比2/√3(≒1.15)要大,则即使进行振幅减少调制,也会发生3相的电压指令值的振幅超过电源电压VDC的一半值的电压饱和,变为过调制状态。调制率M可以增加到电压指令值为矩形波的最大值4/π(≒1.27)为止。
在与施加电压的线间电压重叠的高次谐波分量中,基波的频率(电气角下的旋转频率)的5次和7次的分量变大。另一方面,对于逆变器电流的高次谐波分量,表现为施加电压的5次和7次的分量变成6次的分量。
随着调制率M增加,与施加电压的线间电压重叠的高次谐波分量增加,转矩脉动分量、逆变器电流的高次谐波分量增加。在本实施方式中,为了抑制高次谐波分量的增加,将调制率M的最大设定值设定为比理论最大值1.27要小的值(例如,1.21)。
<开关控制部37>
开关控制部37基于3相的电压指令值Vuo、Vvo、Vwo,通过PWM(Pulse WidthModulation:脉冲宽度调制)控制来使多个开关元件导通截止。开关控制部37通过将3相的电压指令值Vuo、Vvo、Vwo分别与载波进行比较,从而生成使各相的开关元件导通截止的开关信号。载波设为在载波频率下以0为中心以电源电压VDC/2的振幅进行振动的三角波。开关控制部37在电压指令值高于载波的情况下使开关信号导通,在电压指令值低于载波的情况下使开关信号截止。将开关信号保持不变地传输至正极侧的开关元件,将使开关信号反转而得到的开关信号传输至负极侧的开关元件。各开关信号经由栅极驱动电路输入至逆变器20的各开关元件的栅极端子,使各开关元件导通或截止。
<利用电源连接路径的谐振的、电源电流的高次谐波分量的放大>
如果在过调制状态下产生的逆变器电流的6次的高次谐波分量的频率与电源连接路径的谐振频率相一致,则电源电流的高次谐波分量被放大,从而可能对直流电源10和与直流电源10连接的其他装置造成不良影响。
如图5所示,电源连接路径的谐振电路是由逆变器20的平滑电容器12的电容C、在直流电源10与平滑电容器12之间的连接路径上的电感L及电阻R组成的RLC串联谐振电路。该频率特性变为如图6所示那样,在谐振频带内,增益增加。
因此,如果在过调制状态下,旋转角速度ω的6次(6ω)的频率与电源连接路径的谐振频带重复,则电源电流的6次的高次谐波分量被放大。此外,在过调制状态下,调制率M越增加,则被放大之前的6次的高次谐振分量的振幅也就变得越大,与此成比例地,放大后的6次的高次谐波分量的振幅也变大。因此,在过调制状态下,需要使调制率M降低,以使放大后的6次的高次谐波分量的振幅不会变得过大。例如,在图7中,如在不进行后文叙述的最大调制率降低设定的情况下的示例所示那样,在过调制状态下,在旋转角速度ω的6次(6ω)与电源连接路径的谐振频带重复的区域中,随着调制率M变高,放大后的电源电流的6次的高次谐波分量的振幅变大。图7中,示出了等振幅线,随着朝右上行进,高次谐波分量的振幅增加。
<目标调制率设定部34>
这里,目标调制率设定部34设定调制率M的目标值。在与因3相的电压指令值Vuo、Vvo、Vwo的振幅超过电源电压VDC的一半值的过调制而产生的电源电流的高次谐波分量因在电源连接路径中所产生的谐振而导致增大的运行区域相对应地设定的特定过调制运行区域中,目标调制率设定部34进行使调制率的目标值Mo的最大设定值比特定过调制运行区域以外的过调制的运行区域(以下称为非特定过调制运行区域)要低的最大调制率降低设定。
如上所述那样,在过调制状态下,在旋转角速度ω变为与电源连接路径的谐振频带相对应的旋转角速度范围的情况下,随着调制率M增加,放大后的电源电流的高次谐波分量的振幅增加。根据上述的结构,在因该共振而导致电源电流的高次谐波分量增大的特定过调制运行区域中,调制率的目标值的最大设定值变为比其他运行区域要低,因此,降低调制率M,放大后的电源电流的高次谐波分量的振幅的增加被抑制。因此,可以抑制对直流电源10和与直流电源10相连接的其他装置造成不良影响。
例如,如图8所示,将特定过调制运行区域设定在图7中电源电流的高次谐波分量的振幅变大的右上的运行区域。例如,在特定过调制运行区域中,将调制率的目标值的最大设定值设定成1.15,在非特定过调制运行区域中,将调制率的目标值的最大设定值设定成1.21。
在特定过调制运行区域中,使调制率M降低,因此在后文叙述的电流指令值计算部35中,进行减弱磁通控制。减弱磁通控制的结果是,降低调制率的实际值Mr,减少电源电流的高次谐波分量。
在本实施方式中,目标调制率设定部34参照预先设定有旋转角速度ω和转矩指令值To与调制率的目标值Mo之间的关系的目标值设定数据,来计算与当前的旋转角速度ω和转矩指令值To相对应的调制率的目标值Mo。例如,目标值设定数据被设定为图8所示那样的映射数据。在特定过调制运行区域中,调制率的目标值Mo被设定为最大设定值的1.15,被控制成通常调制状态,可以使得逆变器电流中不产生高次谐波分量,可以使得不产生电源电流的高次谐波分量。如此,在本实施方式中,目标调制率设定部34将特定过调制运行区域的调制率的目标值Mo设定为与通常调制状态相对应的调制率M(在本例中为通常调制状态的调制率M的最大值1.15)。另外,也可以将特定过调制运行区域的调制率的目标值Mo设定为比1.15要小的调制率M。或者,也可以在可允许电源电流的高次谐波分量的范围内,将特定过调制运行区域的调制率的目标值Mo设定为比1.15要大的值。
另一方面,在非特定过调制运行区域中,将调制率的目标值Mo设定为最大设定值的1.21至1.15。另外,转矩指令值To可在控制装置1内被运算,也可从外部的装置被传输。
在本实施方式中,在调制率的实际值Mr高于调制率的目标值Mo的情况下,后文叙述的电流指令值计算部35利用减弱磁通控制来调整d轴的电流指令值Ido和q轴的电流指令值Iqo,由此,可使调制率的实际值Mr追随调制率的目标值Mo。另一方面,在调制率的实际值Mr低于调制率的目标值Mo的情况下,电流指令值计算部35进行对减弱磁通进行减弱的控制,但是朝着对减弱磁通进行减弱的一侧的操作宽度受限,因此,调制率的实际值Mr变为保持低于调制率的目标值Mo不变的状态。
即,电流指令值计算部35被构成为,可进行上限限制以使得调制率的实际值Mr不高于调制率的目标值Mo,但是在调制率的实际值Mr低于调制率的目标值Mo的情况下,变为保持低于不变的状态。因此,电流指令值计算部35的通过调制率的目标值Mo来对调制率的实际值Mr进行上限限制的功能提高。
因而,目标值设定数据也可被设定为图9所示那样的映射数据。即,在特定过调制运行区域中,将调制率的目标值Mo设定成最大设定值的1.15,在非特定过调制运行区域中,将调制率的目标值Mo设定成最大设定值的1.21。即使如此地进行设定,在特定过调制运行区域中,调制率的实际值Mr被上限限制为1.15,在非特定过调制运行区域中,调制率的实际值Mr被上限限制为1.21,并随着旋转角速度ω降低且转矩指令值To降低,与图8的设定相同,调制率的实际值Mr从1.21减少。若如图9那样进行设定,则与图8的设定的情况相比,可减少数据设定的操作步骤。
<电流指令值计算部35>
电流指令值计算部35基于调制率的目标值Mo,设定电流指令值。在本实施方式中,在调制率的目标值Mo降低的情况下,电流指令值计算部35维持转矩指令值To的转矩输出,并且计算进行减弱磁通的电流指令值。根据该结构,进行减弱磁通控制,由此,调制率M降低,并且维持转矩指令值To的转矩输出。
另外,在电流指令值由电压限制椭圆或电流限制圆来限制的情况下,转矩输出低于转矩指令值To,但尽可能地接近转矩指令值To。
在本实施方式中,电流指令值计算部35将调制率的目标值Mo乘以电源电压VDC,并且除以旋转角速度ω,从而计算交链磁通指令值的基本值Ψob。
详细而言,如图10和下式所示,电流指令值计算部35将调制率的目标值Mo乘以1/2×√(3/2)及电源电压VDC,并且除以旋转角速度ω,从而计算交链磁通指令值的基本值Ψob。
Ψob=Mo×1/2×√(3/2)×VDC/ω···(2)
然后,如图10和下式所示,电流指令值计算部35将交链磁通指令值的基本值Ψob加上后文叙述的交链磁通校正值Ψoc,从而计算交链磁通指令值Ψo。
Ψo=Ψob+Ψoc···(3)
电流指令值计算部35基于交链磁通指令值Ψo和转矩指令值To,计算d轴的电流指令值Ido和q轴的电流指令值Iqo。电流指令值计算部35参照预先设定有交链磁通指令值Ψo和转矩指令值To与d轴的电流指令值Ido之间的关系的d轴电流设定数据,计算与所计算出的交链磁通指令值Ψo和转矩指令值To相对应的d轴的电流指令值Ido。电流指令值计算部35参照预先设定有交链磁通指令值Ψo和转矩指令值To与q轴的电流指令值Iqo之间的关系的q轴电流设定数据,计算与所计算出的交链磁通指令值Ψo和转矩指令值To相对应的q轴的电流指令值Iqo。
电流指令值计算部35进行使电流指令值变化以使得调制率的实际值Mr接近调制率的目标值Mo的反馈控制。在本实施方式中,电流指令值计算部35在调制率的实际值Mr高于调制率的目标值Mo的情况下,维持转矩指令值To的转矩输出并使电流指令值在进行减弱磁通的方向上变化,在调制率的实际值Mr低于调制率的目标值Mo的情况下,维持转矩指令值To的转矩输出并使电流指令值在对减弱磁通进行减弱的方向上变化。利用反馈控制,可调整减弱磁通的程度,维持转矩指令值To的转矩输出,并使调制率的实际值Mr接近调制率的目标值Mo。
在本实施方式中,电流指令值计算部35使对交链磁通指令值Ψo进行校正的交链磁通校正值Ψoc变化,以使得将调制率的实际值Mr接近调制率的目标值Mo。
如图11和下式所示,电流指令值计算部35计算调制率的实际值Mr相对于调制率的目标值Mo的偏差ΔM,将偏差ΔM乘以1/2×√(3/2)和电源电压VDC并且除以旋转角速度ω,从而计算控制值U。然后,电流指令值计算部35用附条件积分器对将控制值U乘以控制增益Km而得到的值进行积分,并且计算积分值作为交链磁通校正值Ψoc。附条件积分器具有所谓的抗饱和的功能。即,在交链磁通指令值Ψo达到在d轴电流设定数据中所设定的交链磁通指令值Ψo的上限值(可操作宽度的上限值)的情况下,积分器保持积分值而不使积分值增加,而在交链磁通指令值Ψo达到在d轴电流设定数据中所设定的交链磁通指令值Ψo的下限值(可操作宽度的下限值)的情况下,积分器保持积分值而不使积分值减少。
ΔM=Mo-Mr
U=ΔM×1/2×√(3/2)×VDC/ω···(4)
Ψoc=∫(Km×U)
<特定过调制运行区域中的减弱磁通控制>
在特定过调制运行区域中,若降低调制率的目标值Mo,则交链磁通指令值的基本值Ψob降低。此外,在特定过调制运行区域中,如果调制率的实际值Mr高于调制率的目标值Mo,则交链磁通校正值Ψoc减少。因此,在特定过调制运行区域中,降低调制率的目标值Mo,由此交链磁通指令值Ψo降低。若交链磁通指令值Ψo降低,则维持转矩指令值To的转矩输出,并且进行减弱磁通,因而,d轴的电流指令值Ido在负方向上增加,q轴的电流指令值Iqo根据需要而减少。进行减弱磁通控制,由此可使调制率的实际值Mr降低。另外,如上述那样,在朝着d轴的电流指令值Ido的负方向增加的过程中,存在因电压限制椭圆和电流限制圆等而产生的上限,直到达到上限值(在本例中,为在d轴电流设定数据中所设定的交链磁通指令值Ψo的下限值)为止,可使调制率的实际值Mr降低。
因此,在特定过调制运行区域中,降低调制率的目标值Mo,由此,可以在负方向上增加d轴的电流指令值Ido,进行减弱磁通控制,维持转矩指令值To的转矩输出,并使调制率的实际值Mr降低。另一方面,如果d轴的电流指令值Ido达到朝着负方向增加的上限值,则变为无法使调制率的实际值Mr进一步降低,但是该上限值通常被设定为交链磁通为零的值,因此,在达到时刻,调制率M已被减少到接近零,可以得到充分的减少效果。
<在非特定过调制运行区域中调制率的实际值Mr低于调制率的目标值Mo的情况>
另一方面,若调制率的实际值Mr低于调制率的目标值Mo,则交链磁通校正值Ψoc增加,使d轴的电流指令值Ido在正方向上增加,对减弱磁通进行减弱。然而,朝着对减弱磁通进行减弱的方向的操作宽度不大,因而,交链磁通指令值Ψo达到在d轴电流设定数据中所设定的交链磁通指令值Ψo的上限值,如上述那样,调制率的实际值Mr保持低于调制率的目标值Mo不变。
<上限调制率设定部38>
上限调制率设定部38设定调制率的上限限制值MLT。上限调制率设定部38将调制率的上限限制值MLT设定成比调制率的目标值Mo要大的值,并且在特定过调制运行区域中,使调制率的上限限制值的最大设定值比特定过调制运行区域以外的过调制的运行区域要低。
在本实施方式中,上限调制率设定部38参照预先设定有旋转角速度ω和转矩指令值To与调制率的上限限制值MLT之间的关系的上限值设定数据,来计算与当前的旋转角速度ω和转矩指令值To相对应的调制率的上限限制值MLT。例如,上限值设定数据被设定为图12所示那样的映射数据。在特定过调制运行区域中,将调制率的上限限制值MLT设定为比图8的调制率的目标值Mo的1.15要大的最大设定值的1.17。另一方面,在非特定过调制运行区域中,将调制率的上限限制值MLT设定为比图8的调制率的目标值Mo要大,设定为最大设定值的1.23至1.17。然而,在通常调制区域中,为了不使电流控制的响应性恶化,也可不进行这样的设定。
在如图9那样地设定目标值设定数据时,上限值设定数据被设定为如图13所示那样的映射数据。在特定过调制运行区域中,将调制率的上限限制值MLT设定为比图9的调制率的目标值Mo的1.15要大的最大设定值的1.17。另外,目标调制率设定部34也可将特定过调制运行区域的调制率的上限限制值MLT设定为与通常调制状态相对应的调制率M(例如通常调制状态的调制率M的最大值1.15)。在该情况下,可将特定过调制运行区域的调制率的目标值Mo设定为比1.15要小的调制率M(例如1.12)。
另一方面,在非特定过调制运行区域中,将调制率的上限限制值MLT设定为比图9的调制率的目标值Mo的1.21要大的1.23。
<调制率上限限制部362>
电压指令值计算部36使3相的电压指令值变化,以使得3相的电压指令值的调制率变为在调制率的上限限制值MLT以下。在本实施方式中,调制率上限限制部362被构成为,对于dq轴的电压指令值Vdo、Vqo进行调制率的上限限制处理,并对限制后的d轴的电压指令值VdoLT和限制后的q轴的电压指令值VqoLT进行计算。
在不进行调制率的上限限制处理的情况下,如图14所示,在旋转角速度ω上升时等过渡时,调制率的实际值Mr过冲调制率的目标值Mo。因此,电源电流的高次谐波分量可能无意地变大。另一方面,在进行调制率的上限限制处理的情况下,如图15所示,可以进行上限限制以使得调制率的实际值Mr不超过调制率的上限限制值MLT,可管理过冲量。调制率的上限限制处理直接限制电压指令值的调制率,因此,能可靠地对调制率的实际值Mr进行上限控制。
如图16所示,为了将dq轴的电压指令值Vdo、Vqo的调制率M限制为在调制率的上限限制值MLT以下,需要将dq轴的电压指令值Vdo、Vqo限制为在调制率M变为上限限制值MLT的限制圆的范围内。如下式所示,限制圆的半径VLT为将调制率的上限限制值MLT乘以1/2×√(3/2)和电源电压VDC而得到的值。
VLT=MLT×1/2×√(3/2)×VDC···(5)
如图16所示,在dq轴的电压指令值Vdo、Vqo的调制率Mdqv高于调制率的上限限制值MLT的情况下,调制率上限控制部362使dq轴的电压指令值Vdo、Vqo变化为将q轴的电压指令值Vdo、Vqo和原点相连结的线与限制圆的交点。
如果将该处理用数学式来表示,则为如下式那样。即,调制率上限限制部362在dq轴的电压指令值Vdo、Vqo的调制率Mdqv高于调制率的上限限制值MLT的情况下,将调制率的上限限制值MLT除以调制率Mdqv而得到的值乘以dq轴的电压指令值Vdo、Vqo,从而计算限制后的dq轴的电压指令值VdoLT、VqoLT,在调制率Mdqv为在调制率的上限限制值MLT以下的情况下,将dq轴的电压指令值Vdo、Vqo保持不变地设定成限制后的dq轴的电压指令值VdoLT、VqoLT。
Mdqv=√(Vdo2+Vdo2)/{1/2×√(3/2)×VDC}
1)Mdqv>MLT的情况
[VdoLT,VqoLT]=MLT/Mdqv×[Vdo,Vqo]
2)Mdqv≦MLT的情况···(6)
[VdoLT,VqoLT]=[Vdo,Vqo]
2.实施方式2
说明实施方式2所涉及的控制装置1。省略对与上述的实施方式1相同的结构部分的说明。本实施方式所涉及的控制装置1的基本结构与实施方式1相同,但目标调制率设定部34中的调制率的目标值Mo的计算方法、和上限调制率设定部38中的调制率的上限限制值MLT的计算方法与实施方式1不同。
<目标调制率设定部34>
在本实施方式中,在图17中,目标调制率设定部34基于调制率的实际值Mr,计算流过逆变器的逆变器电流中所包含的逆变器高次谐波电流分量的振幅ΔIinH,使用电源连接路径的频率特性来计算电源连接路径的放大增益KH,将逆变器高次谐波电流分量的振幅ΔIinH乘以放大增益KH,计算电源电流的高次谐波分量的振幅ΔIdcH。然后,目标调制率设定部34构成为基于电源电流的高次谐波分量的振幅ΔIdcH来计算调制率的目标值Mo。
详细来说,如图17的框图所示那样地构成。目标调制率设定部34基于电压指令值来计算调制率的实际值Mr。目标调制率设定部34基于dq轴电流与dq轴电压之间的相位差来计算功率因数PF。然后,目标调制率设定部34参照设定有调制率M和功率因数PF与6次的高次谐波分量相对于交流功率的比例RacH之间的关系的比例设定数据,来计算与所计算出的调制率的实际值Mr和功率因数PF相对应的6次的高次谐波分量的比例RacH。
目标调制率设定部34将dq轴电流和dq轴电压相乘来计算交流功率Pac。目标调制率设定部34将交流功率Pac乘以6次的高次谐波分量的比例RacH,从而计算交流功率Pac中所包含的6次的高次谐波分量的振幅ΔPacH。目标调制率设定部34将6次的高次谐波分量的振幅ΔPacH除以电源电压VDC,以计算逆变器电流中所包含的6次的逆变器高次谐波分量的振幅ΔIinH。
此外,目标调制率设定部34参照预先设定有频率与放大增益KH之间的关系的电源连接路径的频率特性,来计算与旋转角速度ω的6倍的频率相对应的放大增益KH。目标调制率设定部34将6次的逆变器高次谐波分量的振幅ΔIinH乘以放大增益KH,从而计算电源电流的6次的高次谐波分量的振幅ΔIdcH。
目标调制率设定部34参照预先设定有高次谐波分量的振幅ΔIdcH与调制率的目标值Mo之间的关系的目标值设定数据,来计算与所计算出的电源电流的6次的高次谐波分量的振幅ΔIdcH相对应的调制率的目标值Mo。该目标值设定数据也可以如图18所示那样地被设定。在电源电流的高次谐波分量的振幅ΔIdcH较小的情况下,与非特定过调制运行区域相对应,因而调制率的目标值Mo被设定成较高的值,例如1.21。另一方面,在电源电流的高次谐波分量的振幅ΔIdcH较大的情况下,与特定过调制运行区域相对应,因而调制率的目标值Mo被设定为较低的值,例如1.15。如此,随着电源电流的高次谐波分量的振幅ΔIdcH增加,降低调制率的目标值Mo。本实施方式的设定与实施方式1的图9的设定接近。如此,在本实施方式中,将特定过调制运行区域的调制率的目标值Mo设定成与通常调制状态相对应的调制率M(在本例中为通常调制状态的调制率M的最大值1.15)。另外,也可以将特定过调制运行区域的调制率的目标值Mo设定为比1.15要小的调制率M。
<上限调制率设定部38>
与目标调制率设定部34相同地,上限调制率设定部38基于调制率的实际值Mr,计算流过逆变器的逆变器电流中所包含的逆变器高次谐波电流分量的振幅ΔIinH,使用电源连接路径的频率特性来计算电源连接路径的放大增益KH,将逆变器高次谐波电流分量的振幅ΔIinH乘以放大增益KH,计算电源电流的高次谐波分量的振幅ΔIdcH。然后,上限调制率设定部38构成为基于电源电流的高次谐波分量的振幅ΔIdcH来计算调制率的上限限制值MLT。
如图17所示,目标调制率设定部34与上限调制率设定部38之间被通用为电源电流的高次谐波分量的振幅ΔIdcH的计算部分。然后,上限调制率设定部38参照预先设定有高次谐波分量的振幅ΔIdcH与调制率的上限限制值MLT之间的关系的上限限制值设定数据,来计算与所计算出的电源电流的6次的高次谐波分量的振幅ΔIdcH相对应的调制率的上限限制值MLT。
该上限限制值设定数据也可以如图18所示那样地被设定。在电源电流的高次谐波分量的振幅ΔIdcH较小的情况下,与非特定过调制运行区域相对应,调制率的上限限制值MLT被设定为比调制率的目标值Mo要大的值,例如1.23。另一方面,在电源电流的高次谐波分量的振幅ΔIdcH较大的情况下,与特定过调制运行区域相对应,调制率的上限限制值MLT被设定为比调制率的目标值Mo要大的值,例如1.17。如此,随着电源电流的高次谐波分量的振幅ΔIdcH增加,调制率的上限限制值MLT在为比调制率的目标值Mo要大的值的状态下被降低。本实施方式的设定与实施方式1的图13的设定接近。另外,也可将特定过调制运行区域的调制率的上限限制值MLT设定为与通常调制状态相对应的调制率M(例如通常调制状态的调制率M的最大值1.15)。在该情况下,可以将特定过调制运行区域的调制率的目标值Mo设定为比1.15要小的调制率M(例如1.12)。
<转用例>
在上述的各实施方式中,以设置3相的绕组的情况为例进行了说明。然而,绕组的相数只要是多个相,也可设定成2相、4相等任意的数量。
在上述的各实施方式中,以设置1组3相的绕组和逆变器的情况为例进行了说明。然而,也可以设置2组以上的3相绕组和逆变器,并且对各组的3相绕组和逆变器进行与各实施方式相同的控制。
在上述的各实施方式中,以设置1组3相的绕组和逆变器的情况为例进行了说明。然而,也可以设置2组以上的3相绕组和逆变器,并且对各组的3相绕组和逆变器进行与各实施方式相同的控制。
在上述的各实施方式中,以如下情况为例进行了说明:即、电流指令值计算部35使用交链磁通指令值来作为中间参数,基于调制率的目标值Mo等使交链磁通指令值变化,并基于交链磁通指令值设定电流指令值。然而,电流指令值计算部35也可在不使用交链磁通指令值的情况下设定电流指令值。例如,如日本专利特开2012—200073号公报所公开的那样,电流指令值计算部35也可以使用电压不足比例作为中间参数,基于调制率的目标值Mo等来使电压不足比例变化,并基于电压不足比例来设定电流指令值。
本申请虽然记载了各种示例性的实施方式及实施例,但在1个或多个实施方式中所记载的各种特征、形态、和功能并不限于适用于特定的实施方式,也可单独地或进行各种组合地适用于实施方式。因此,可以认为未例示出的无数变形例也包含在本申请说明书所公开的技术范围内。例如,设为也包含对至少1个结构要素进行变形的情况、进行追加的情况或者进行省略的情况、以及提取至少1个结构要素并且与其他实施方式的结构要素进行组合的情况。
标号说明
1交流旋转电机的控制装置,2交流旋转电机,10直流电源,12平滑电容器,20逆变器,31电流检测部,32旋转检测部,33电压检测部,34目标调制率设定部,35电流指令值计算部,36电压指令值计算部,37开关控制部,38上限调制率设定部,M调制率,MLT调制率的上限限制值,Mo调制率的目标值,Mr调制率的实际值,To转矩指令值,VDC电源电压,ω旋转角速度。
- 交流旋转电机的控制装置、具备交流旋转电机的控制装置的交流旋转电机驱动系统及电动助力转向系统
- 交流旋转电机的控制装置、以及具备交流旋转电机的控制装置的电动助力转向系统