一种带四驱电动轮底盘及其工作方法
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及智能化运输领域,是一种带四驱电动轮底盘及其工作方法。
背景技术
随着社会的进步与发展,进行日常的学习、工作和生活。四驱电动轮底盘应用场景广泛如,智能化机器人、医用电动轮椅、共享代步车等产品。其中四驱电动轮底盘作为一种理想的代步工具,市场需求量大,医用四驱电动轮椅适合于下肢残疾和行走不便的年老体弱者使用,相对于四驱电动轮底盘轮椅,活动范围大,适用人群多,功能强大。四驱电动轮底盘作为智能电动轮椅的主要组成部分,它是残疾人控制四驱电动轮椅最直接的部分。使用者通过操控器控制四驱电动轮椅,表达操作意图,实现对四驱电动轮椅行驶速度和行驶方向的控制,所以四驱电动轮底盘对于整个医用电动轮椅,智能机器人,共享代步车等产品的运行至关重要,四轮驱动、用于雪天、泥泞路段、山路、爬坡、草坪地、越障性能好等,以获得更强劲的通行能力。
但现有的四驱电动轮底盘直行不够稳定,且刹车距离较长容易出现不能及时停下撞伤人的问题,旋转半径较大,无法在狭窄空间内实现调转,行驶安全性较低。
发明内容
鉴于现有技术的不足,本发明所要解决的技术问题是提供一种带四驱电动轮底盘及其工作方法,不仅结构稳定,而且操作安全简单。
为了解决上述技术问题,本发明的技术方案是:一种带四驱电动轮底盘,包括底盘及连接在底盘上端的车身架,所述底盘由两左右平行的侧板与前后平行的前连杆、后连板围设组成,所述侧板后端内侧均固设有电机且该电机输出轴均横向朝外贯穿侧板与橡胶轮相连,所述侧板前端外侧均连接有全向轮,同侧的橡胶轮与全向轮之间经皮带轮组件连接同步转动,所述车身架上设有若干缓震弹簧并朝下延伸与底盘连接。
进一步的,所述皮带轮组件的前侧的皮带轮均与全向轮同轴设置并带其转动,后侧的皮带轮均与橡胶轮同轴设置并套设在输出轴外且与其键连接。
进一步的,两全向轮及两橡胶轮均左右对称设置在两侧板外侧,两侧板外端面上均设有松紧轮并经皮带绕接穿过,该松紧轮中心经轴承与连轴连接,所述侧板外端面均沿其长度方向开设供松紧轮前后滑移调位的调位槽,所述连轴内端延伸入调位槽,于松紧轮与侧板之间的连轴上固设有定位板,所述侧板上间隔开设有若干与定位板经螺栓固定的连接孔。
进一步的,所述缓震弹簧上下端均经铰接座分别与车身架及底盘连接,缓震弹簧供设有四个,其中两个左右平行设在车身架外侧并竖向延伸与侧板外端面连接,另外两个均转动连接设置在车身架后端并朝后下方斜向延伸与后连板连接。
进一步的,所述前连杆左右端均经连接块与两侧板连接,所述车身架前端固连有斜向下延伸的U型杆,该U型杆开口朝上且下端经呈L状的支撑板支撑固定,所述支撑板水平段固连在前连杆上。
进一步的,所述前连杆上铰接有脚踏板。
进一步的,所述橡胶轮作为驱动轮,与作为转向轮的全向轮组合驱动。
一种带四驱电动轮底盘的工作方法,其行驶方式主要包括以下几种:
(1)向前方直行时:左右两个驱动电机同时正向转动带动后皮带轮经同步带动前皮带轮一起转动,进而带动全向轮转动行走实现向前直行动作;
(2)向后方直行时:左右两个驱动电机同时反向转动带动后皮带轮经同步带带动前皮带轮一起转动,进而带动全向轮转动行走实现向后直行动作;
(3)向左方向行走时:左驱动电机放慢转速或停止转动,但右驱动电机以正常时速或加速状态下运转工作,带动后皮带轮经同步带带动前皮带轮一起转动,进而带动右侧的全向轮转动实现行走,此时右侧橡胶轮及全向轮转速大于左侧,即可实现向左方向转动行驶动作;
(4)向右方向行走时:右驱动电机放慢转速或停止转动,但左驱动电机以正常时速或加速状态下运转工作,带动后皮带轮经同步带带动前皮带轮一起转动,进而带动左侧的全向轮转动实现行走,此时左侧橡胶轮及全向轮转速大于右侧,即可实现向右方向转动行驶动作;
(5)向左原地中心旋转时:左侧驱动电机反向转动,右侧驱动电机正向转动,且以同等速度状态下运转工作,即可实现向左原地中心360度旋转行驶动作。
(6)向右原地中心旋转时:左侧驱动电机正向转动,右侧驱动电机反向向转动,且以同等速度状态下运转工作,即可实现向左原地中心360度旋转行驶动作。
与现有技术相比,本发明具有以下有益效果:该带四驱电动轮底盘,行驶于路面上更加平稳舒适,直行不易左右偏摆,刹车距离短而更安全,旋转半径小可在狭窄空间调转。四轮驱动、适用于雪天、泥泞路段、山路、爬坡、草坪地等环境、越障性能好等,具有更强劲的通行能力。
四驱电动底盘采用全向轮转向方式减少转向旋转半径距离使上方座椅更稳不易侧翻倾倒,保证行驶更安全,提高轮椅行驶过程工作效率。
下面结合附图和具体实施方式对本发明做进一步详细的说明。
附图说明
图1为本发明实施例的构造示意图;
图2为本发明实施例的仰视图;
图3为本发明实施例的侧视图;
图4为本发明实施例中去除脚踏板的构造示意图;
图5为本发明实施例中松紧轮与侧板的连接示意图;
图6为本发明实施例中前连杆与侧板的连接示意图;
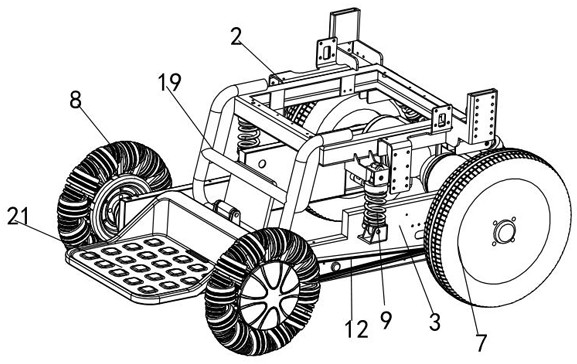
图7为本发明实施例的立体图。
图中:1-底盘,2-车身架,3-侧板,4-前连杆,5-后连板,6-电机,7-橡胶轮,8-全向轮,9-缓震弹簧,10-皮带轮,11-松紧轮,12-皮带,13-轴承,14-连轴,15-调位槽,16-定位板,17-连接孔,18-连接块,19-U型杆,20-支撑板,21-脚踏板。
具体实施方式
为让本发明的上述特征和优点能更明显易懂,下文特举实施例,并配合附图,作详细说明如下。
如图1~6所示,一种带四驱电动轮底盘,包括底盘1及连接在底盘上端的车身架2,所述底盘由两左右平行的侧板3与前后平行的前连杆4、后连板5围设组成,所述侧板后端内侧均固设有电机6且该电机输出轴均横向朝外贯穿侧板与橡胶轮7相连,所述侧板前端外侧均连接有全向轮8,左右方向同侧的橡胶轮与全向轮之间经皮带轮组件连接同步转动,所述车身架上设有若干缓震弹簧9并朝下延伸与底盘连接。
在本发明实施例中,所述皮带轮组件的前侧的皮带轮10均与全向轮同轴设置并带其转动,后侧的皮带轮均与橡胶轮同轴设置并套设在输出轴外且与其键连接。
在本发明实施例中,两全向轮及两橡胶轮均左右对称设置在两侧板外侧,两侧板外端面上均设有松紧轮11并经皮带12绕接穿过,该松紧轮中心经轴承13与连轴14连接,所述侧板外端面均沿其长度方向开设供松紧轮前后滑移调位的调位槽15,所述连轴内端延伸入调位槽,于松紧轮与侧板之间的连轴上固设有定位板16,固定板套设在连轴上且固设为一体,所述侧板上间隔开设有若干与定位板经螺栓固定的连接孔17,所述定位板为方形,该连接孔设有两排,且沿调位槽上下对称设置,该松紧轮下端压接在皮带上或上端顶接在皮带上,可通过前后前后调节松紧轮,松紧轮与定位板沿调位槽前后滑移,进而调节皮带的松紧度。
在本发明实施例中,所述缓震弹簧上下端均经铰接座分别与车身架及底盘连接,缓震弹簧供设有四个,其中两个左右平行设在车身架外侧并竖向延伸与侧板外端面连接,另外两个均转动连接设置在车身架后端并朝后下方斜向延伸与后连板连接。
在本发明实施例中,所述前连杆左右端均经连接块18与两侧板连接,所述车身架前端固连有斜向下延伸的U型杆19,该U型杆开口朝上且下端经呈L状的支撑板20支撑固定,所述支撑板水平段固连在前连杆上。
在本发明实施例中,所述前连杆上铰接有脚踏板21。
在本发明实施例中,所述橡胶轮作为驱动轮,与作为转向轮的全向轮组合驱动。
一种带四驱电动轮底盘的工作方法,其采用后驱动电机与皮带轮同步传动橡胶轮与全向轮,该机械传动方式再加上全向轮的全方向转向特点实现四驱功能,四驱动电机带动四个轮子同时运行驱动行走以获得更强劲的通行能力。四驱电动底盘采用全向轮转向方式减少转向旋转半径距离使上方座椅更稳不易侧翻倾倒,保证行驶更安全,提高轮椅行驶过程工作效率,其行驶方式主要包括以下几种:
(1)向前方直行时:左右两个驱动电机同时正向转动带动后皮带轮经同步带动前皮带轮一起转动,进而带动全向轮转动行走实现向前直行动作;
(2)向后方直行时:左右两个驱动电机同时反向转动带动后皮带轮经同步带带动前皮带轮一起转动,进而带动全向轮转动行走实现向后直行动作;
(3)向左方向行走时:左驱动电机放慢转速或停止转动,但右驱动电机以正常时速或加速状态下运转工作,带动后皮带轮经同步带带动前皮带轮一起转动,进而带动右侧的全向轮转动实现行走,此时右侧橡胶轮及全向轮转速大于左侧,即可实现向左方向转动行驶动作;
(4)向右方向行走时:右驱动电机放慢转速或停止转动,但左驱动电机以正常时速或加速状态下运转工作,带动后皮带轮经同步带带动前皮带轮一起转动,进而带动左侧的全向轮转动实现行走,此时左侧橡胶轮及全向轮转速大于右侧,即可实现向右方向转动行驶动作;
(5)向左原地中心旋转时:左侧驱动电机反向转动,右侧驱动电机正向转动,且以同等速度状态下运转工作,即可实现向左原地中心360度旋转行驶动作。
(6)向右原地中心旋转时:左侧驱动电机正向转动,右侧驱动电机反向向转动,且以同等速度状态下运转工作,即可实现向左原地中心360度旋转行驶动作。
本发明不局限于上述最佳实施方式,任何人在本发明的启示下都可以得出其他各种形式的带四驱电动轮底盘及其工作方法。凡依本发明申请专利范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
- 一种带四驱电动轮底盘及其工作方法
- 一种带四驱电动轮底盘