无菌围帘及具有其的手术机器人组件
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及医疗器械技术领域,具体而言涉及一种无菌围帘及具有其的手术机器人组件。
背景技术
目前,越来越多的手术,例如腹腔镜手术已经能够使用手术机器人来实现。手术机器人包括机械臂、用于安装手术器械的驱动模组和引导件。驱动模组可带动手术器械沿直线运动,手术器械穿入引导件,并从引导件下方穿出。将手术器械安装至手术机器人的机械臂,外科医生可以通过远程操作的方式直观地控制手术器械从而完成手术操作。
手术机器人的机械臂在开展手术之前需要完成一系列的准备工作。安装无菌围帘是其中的一个重要步骤。由此,通过无菌围帘能够将病患与手术机器人隔离,让病患处于一个良好的无菌环境中,以及防止病患的体液污染到手术机器人。
无菌围帘能够隔离手术机器人的机械臂与手术器械,但不能阻碍机械臂同手术器械之间的机械动力、电信号和数据等传输。同时,当机械臂被安装上无菌围帘之后,其主动运动不能受到约束。
已有的无菌围帘通常会设置有一个第一开口和第二开口。第一开口较大,无菌围帘使用第一开口来整体地从机械臂的设置有手术器械的一端套入直到包覆整条机械臂。第二开口用于驱动模组的安装,以便传输机械动力。现有的技术方案要求将整个无菌围帘通过第一开口套在整条机械臂上。机械臂的构型和姿态会给无菌围帘的安装带来一些阻碍和困难。没有经验的医护人员往往很难顺利地完成无菌围帘的安装。
因此,需要一种无菌围帘及具有其的手术机器人组件,以至少部分地解决以上问题。
发明内容
在发明内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
为至少部分地解决上述问题,本发明提供了一种无菌围帘,用于手术机器人,所述手术机器人包括机械臂,所述机械臂具有远离病患侧的近端和靠近所述病患侧的远端,
所述无菌围帘具有用于与所述近端对应的第一端、用于与所述远端对应的第二端以及在所述第一端和所述第二端之间延伸的密封接口,
所述密封接口可开闭,并且所述无菌围帘在所述密封接口打开时在所述第一端处于开放状态,所述无菌围帘在所述密封接口闭合时在所述第一端处形成端开口,并且围绕所述机械臂的周侧密封地包覆所述机械臂。
可选地,所述密封接口包括第一接口部分和第二接口部分,所述第一接口部分与所述第二接口部分密封地连接,所述第一接口部分和所述第二接口部分中的至少一个设置有止位部,所述止位部位于所述第一端和所述第二端。
可选地,所述机械臂包括位于所述远端的支柱和驱动模组,所述驱动模组安装至所述支柱的上部,所述无菌围帘包覆所述支柱,所述无菌围帘包括上适配部,所述上适配部包覆所述驱动模组。
可选地,所述上适配部包括在水平方向上至少一部分可分开的第一上适配部分和第二上适配部分,所述第一上适配部分和第二上适配部分通过连接结构密封地连接。
可选地,所述密封接口延伸至所述上适配部,并与所述连接结构相接。
可选地,所述上适配部构造为一个整体,所述密封接口延伸至所述上适配部。
可选地,所述上适配部包括带开口的连接件和在所述开口处与所述连接件相连的容纳部,所述连接件用于与所述无菌围帘的主体连接,所述容纳部构造成与所述驱动模组的形状相对应。
可选地,所述机械臂还包括引导件,所述引导件安装至所述支柱的下部,所述肢臂与所述支柱的中部枢接,所述无菌围帘包括支柱下包覆部和/或下适配部,所述支柱下包覆部包覆所述支柱的至少下部,所述下适配部用于安装所述引导件,所述下适配部与所述支柱下包覆部连接。
可选地,所述支柱下包覆部设置有可开闭的侧边密封接口,所述侧边密封接口沿与所述支柱的长度方向对应的方向延伸。
可选地,所述密封接口的接合方式为粘接、拉合、热压或压合中的一种或多种。
可选地,所述密封接口在所述无菌围帘安装至所述机械臂时位于所述机械臂的上方。
根据本发明的另一方面提供了一种手术机器人组件,其包括带机械臂的手术机器人和上述任一方面所述的无菌围帘,所述无菌围帘包覆所述机械臂。
可选地,所述机械臂具有远离病患侧的近端、靠近所述病患侧的远端以及在所述近端和远端之间设置的两个或多个肢臂,所述近端与所述无菌围帘的第一端对应,所述远端与所述无菌围帘的第二端对应,相邻的所述肢臂彼此枢接。
可选地,所述机械臂包括位于所述远端的支柱和用于安装手术器械的驱动模组,所述驱动模组安装至所述支柱的上部并沿所述支柱的长度方向可移动,所述无菌围帘包覆所述支柱,所述无菌围帘的上适配部包覆所述驱动模组。
可选地,所述机械臂还包括用于安装所述手术器械的引导件,所述引导件安装至所述支柱的下部,所述肢臂与所述支柱的中部枢接,所述无菌围帘的支柱下包覆部包覆所述支柱的至少下部。
根据本发明提供的无菌围帘,其在安装过程且密封接口处于打开状态时是一个开放的曲面,而非圆柱面;在未安装时,无菌围帘能够展开形成一个开放的平面,从拓扑学角度而言无菌围帘展开时仅具有一个开口。这样开放的设计可以大幅度降低无菌围帘的安装的复杂性,降低对医护人员的安装能力的要求,提高安装效率。
当安装无菌围帘时,将打开的无菌围帘的第一端对应于近端,第二端对应于远端,然后将无菌围帘整体地套设至机械臂,最后将密封接口闭合,使无菌围帘围绕机械臂的周侧密封地包覆机械臂。由此,无菌围帘的安装过程简单易操作,不会被机械臂的构型和姿态所影响,即便是没有经验的医护人员也可以快捷地完成无菌围帘的安装。
附图说明
本发明的下列附图在此作为本发明的一部分用于理解本发明。附图中示出了本发明的实施例及其描述,用来解释本发明的原理。
附图中:
图1为根据本发明的优选实施方式的覆盖至手术机器人的无菌围帘一个结构示意图,其中无菌围帘处于包覆状态;
图2为图1中所示的无菌围帘的另一个结构示意图,其中无菌围帘处于打开状态;
图3为图1中所示的上适配部的一个实施方式的结构示意图;
图4为图3中所示的处于分开状态的上适配部的结构示意图;
图5为图1中所示的上适配部的另一个实施方式的结构示意图;
图6为图1中所示的上适配部的再一个实施方式的结构示意图;
图7为图1中所示的无菌围帘的另一个实施方式的结构示意图。
附图标记说明:
110:调整臂 120:机械臂
121:近端 122:远端
123:肢臂 124:支柱
125:驱动模组 300:无菌围帘
301:第一端 302:第二端
311:密封接口 312:端开口
313:第一接口部分 314:第二接口部分
315:止位部 320:上适配部
321:连接件 322:容纳部
323:通孔 324:第一上适配部分
325:第二上适配部分 326:连接结构
330:支柱下包覆部 331:侧边密封接口
具体实施方式
在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
为了彻底理解本发明,将在下列的描述中提出详细的描述。显然,本发明实施方式的施行并不限定于本领域的技术人员所熟悉的特殊细节。本发明的较佳实施例详细描述如下,然而除了这些详细描述外,本发明还可以具有其他实施方式。
应予以注意的是,这里所使用的术语仅是为了描述具体实施例,而非意图限制根据本发明的示例性实施例。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式。此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在所述特征、整体、步骤、操作、元件和/或组件,但不排除存在或附加一个或多个其他特征、整体、步骤、操作、元件、组件和/或它们的组合。
本发明中所引用的诸如“第一”和“第二”的序数词仅仅是标识,而不具有任何其他含义,例如特定的顺序等。而且,例如,术语“第一部件”其本身不暗示“第二部件”的存在,术语“第二部件”本身不暗示“第一部件”的存在。
需要说明的是,本文中所使用的术语“上”、“下”、“前”、“后”、“左”、“右”、“内”、“外”以及类似的表述只是为了说明目的,并非限制。
现在,将参照附图更详细地描述根据本发明的示例性实施例。然而,这些示例性实施例可以多种不同的形式来实施,并且不应当被解释为只限于这里所阐述的实施例。应当理解的是,提供这些实施例是为了使得本发明的公开彻底且完整,并且将这些示例性实施例的构思充分传达给本领域普通技术人员。
本发明提供了一种无菌围帘300,用于手术机器人。在手术过程中,手术机器人的一部分被包覆在无菌围帘300内(如图1所示),以在非无菌手术机器人与无菌操作环境之间提供无菌屏障。无菌围帘300由诸如由聚丙烯、聚乙烯或聚四氟乙烯等制成的连接件构成。无菌围帘300是柔性的和/或可变形的。这可以有助于无菌围帘300包覆手术机器人而不会在外科手术过程中干扰机器人臂和/或器械的位置和/或运动。由此,本发明还提供了一种手术机器人组件,其包括手术机器人和无菌围帘300。
手术机器人可以包括调整臂110、机械臂120和手术器械。调整臂110能够与机械臂120连接。机械臂120能够用于支撑手术器械。具体地,调整臂110可以设置有至少一个,当调整臂110设置有两个或多个时,相邻的调整臂110彼此枢接。机械臂120可以具有近端121、与近端121相对的远端122以及在近端121和远端122之间设置的两个或多个肢臂123。近端121远离病患侧,即是机械臂120的远离病患的一端,远端122靠近病患侧,即是机械臂120的靠近病患的一端。机械臂120的近端121能够枢接至调整臂110。手术器械能够设置于机械臂120的远端122。相邻的肢臂123能够彼此枢接,由此肢臂123各自均能够在相同的方向上和/或不同的方向上进行枢转运动,以允许手术器械以一个或更多个机械自由度移动。
为了便于手术器械的安装,机械臂120可以包括位于远端122的支柱124和驱动模组125。支柱124能够与肢臂123枢接。驱动模组125安装至所述支柱124的上部并沿支柱124的长度方向可移动。具体地,支柱124设置有沿支柱124的长度方向延伸的滑轨和在滑轨上可移动的驱动模组125。无菌围帘300设置有供驱动模组125运动的额外空间。手术器械的上部能够安装至驱动模组125,被驱动模组125带动沿直线运动。支柱124的下部可以设置有引导件。手术器械可以穿过引导件,具体是手术器械从上方穿入引导件,并从引导件下方穿出。手术器械能够相对于引导件可移动。引导件可以由管状构件制成。
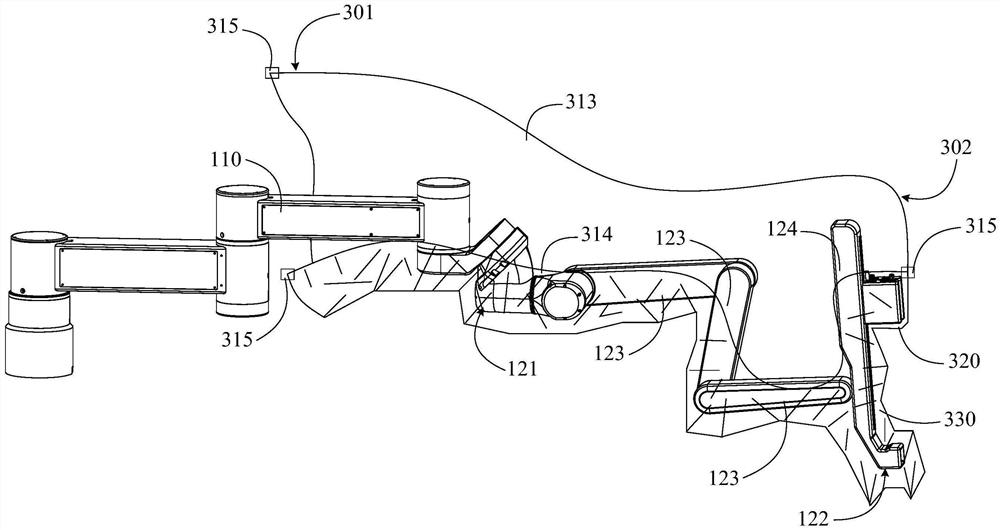
无菌围帘300可以具有用于与近端121对应的第一端301、用于与远端122对应的第二端302以及在第一端301和第二端302之间延伸的密封接口311。图1中用加粗线示意性地示出处于闭合状态下的密封接口311。可以理解,无菌围帘300的第一端301与机械臂120的近端121对应是指当无菌围帘300包覆至手术机器人时,无菌围帘300的第一端301能够穿过近端121或位于近端121处,类似地,无菌围帘300的第二端302能够与机械臂120的远端122对应是指当无菌围帘300包覆至手术机器人时,无菌围帘300的第二端302能够位于远端122处。密封接口311能够可开闭,进一步说,密封接口311在无菌围帘300安装之前是打开的,当无菌围帘300包覆机械臂120时,密封接口311能够被闭合。
无菌围帘300在密封接口311打开时在第一端301处于开放状态,无菌围帘300在密封接口311闭合时可以在其第一端301处形成端开口312,并且能够围绕机械臂120的周侧密封地包覆机械臂120(图1)。本实施方式提供的无菌围帘300在安装过程且密封接口311处于打开状态时是一个开放的曲面(图2),而非圆柱面;在未安装时,无菌围帘300能够展开形成一个开放的平面,从拓扑学角度而言无菌围帘300展开时仅具有一个开口。这样开放的设计可以大幅度降低无菌围帘300的安装的复杂性,降低对医护人员的安装能力的要求,提高安装效率。
当安装无菌围帘300时,将打开的无菌围帘300的第一端301对应于近端121,第二端302对应于远端122,然后将无菌围帘300整体地套设至机械臂120,最后将密封接口311闭合,使无菌围帘300围绕机械臂120的周侧密封地包覆机械臂120。由此,无菌围帘300的安装过程简单易操作,不会被机械臂120的构型和姿态所影响,即便是没有经验的医护人员也可以快捷地完成无菌围帘300的安装。
进一步地,密封接口311在无菌围帘300安装至机械臂120时位于机械臂120的上方。即密封接口311设置在背离病患的方向,这样可以提高无菌效果,减少污染或对手术器械以及病患的感染。
下面描述无菌围帘300的密封接口311的结构。
密封接口311可以具有实现诸如粘接、拉合、热压或压合等密封方式的结构。进一步说,密封接口311的接合方式可以是粘接、拉合、热压或压合等方式中的一种或多种。本文所使用的“多种”意指两种或两种以上。其中拉合可以是拉链拉合或卡扣拉合。具体地,密封接口311可以包括第一接口部分313和第二接口部分314。可以理解,本文的第一接口部分313和第二接口部分314是指无菌围帘300邻近密封接口311的部分。第一接口部分313与第二接口部分314能够密封地连接。如图2所示,第一接口部分313和第二接口部分314中的至少一个可以设置有止位部315。需要说明的是,图2中示出的止位部315主要是用来说明其所在位置,止位部315的形状仅是示意性示出。止位部315能够位于第一端301和第二端302。通过设置止位部315,可以容易地将无菌围帘300的两个接口部分在第一端301和第二端302处对齐,使医护人员从第一端301和/或第二端302快速地开始操作,逐渐闭合密封接口311。并且在拉链拉合、卡扣拉合等密封方式中,可以借助于止位部315限制拉链或卡扣的拉动位置,使拉链或卡扣不会从无菌围帘300脱出。
在图示实施方式中,第一接口部分313在第一端301和第二端302处均设置有止位部315;第二接口部分314在第一端301和第二端302处也均设置有止位部315。第二端302处的两个止位部315可以构造为一个整体,也就是说,无菌围帘300在第二端302处设置有共止位置。
在一个实施方式中,第一接口部分313可以粘接或热压密封至第二接口部分314。由此,无菌围帘300能够以粘接或热压密封的方式密封。在另一个实施方式中,第一接口部分313可以设置有形成凹凸结构的第一接合部。第二接口部分314可以设置有形成凹凸结构的第二接合部。第一接合部能够通过凹凸结构与第二接合部接合。由此,无菌围帘300能够以拉链拉合、卡扣压合或拉合的方式密封。
无菌围帘300还可以设置有横跨密封接口311的滑扣部。滑扣部在第一端301和第二端302之间滑动,并使第一接合部与第二接合部两者的凹凸结构接合。滑动部可以是带拉片的拉头或者不带拉片的拉头。凹凸结构可以是成排布置的链牙,或者是卡槽和与卡槽配合的筋扣。由此,无菌围帘300能够以拉链拉合或卡扣拉合的方式密封。
无菌围帘300能够包覆支柱124。无菌围帘300可以包括上适配部320。上适配部320能够包覆驱动模组125。密封接口311可以延伸至上适配部320。如图3所示,上适配部320可以包括带开口的连接件321和在开口处与连接件321相连的容纳部322。连接件321用于与无菌围帘300的主体连接。连接件321可以构造成具有一定硬度,并且可以是片状;例如连接件321可以是具有一定硬度的塑料片。容纳部322能够构造成与驱动模组125的形状相对应,以便在无菌围帘300覆盖至机械臂120之后,通过上适配部320能够直观的定位驱动模组125的位置。上适配部320可以设置有用于驱动模组125的一部分穿过的通孔323。例如,上适配部320的上表面可以设置有通孔323,通孔323的个数可以根据驱动模组125的对应结构设置。图中示出有4个整齐布置的通孔323。
上适配部320可以包括在水平方向上至少一部分可分开的第一上适配部分324和第二上适配部分325。由此,可以方便驱动模组125安装至上适配部320内。如图4所示,第一上适配部分324与第二上适配部分325可以部分地分开,即上适配部320构造成半割裂。例如容纳部322的上表面以及连接件321在容纳部322上方的部分可以设置有开口,以形成部分分开的第一上适配部分324与第二上适配部分325。如图5所示,第一上适配部分324与第二上适配部分325可以完全地分开,即上适配部320构造成全割裂,第一上适配部分324和第二上适配部分325各自是独立体。
第一上适配部分324和第二上适配部分325可以通过连接结构326密封地连接。在该实施方式中,密封接口311可以与连接结构相接。具体是,密封接口311的第一接口部分313和第二接口部分314可以与相应位置的连接结构相接。进一步地,在密封接口311以及上适配部320的开口均打开时,密封接口311和上适配部320的开口可以形成一个大的开口。需要说明的是,图3中仅是示意性地示出连接结构326所在位置。连接结构326可以具有实现诸如粘接、拉合、热压或压合等密封方式的结构。进一步说,上适配部320的接合方式可以是粘接、拉合、热压或压合等方式中的一种或多种。
可替代地,如图6所示,上适配部320可以构造为一个整体。在无菌围帘300安装时,可以将上适配部320经由连接件321的开口直接套设至驱动模组125。
返回参照图2,无菌围帘300可以包括支柱下包覆部330,支柱下包覆部330能够包覆支柱124的至少下部。由此,可以便于快速地安装,并且增强无菌效果。支柱下包覆部330的上端具有开口,在该实施方式中,无菌围帘300在展开时可以形成带有预设凸起形状的平面。可选地,无菌围帘300可以包括下适配部(未示出),下适配部能够用于安装引导件。下适配部能够与支柱下包覆部330连接。下适配部能够构造成具有一定硬度,以能够卡在支柱124的下部末端,从而支柱下包覆部330能够固定至支柱124的下部末端;并且可以向引导件提供支撑力,便于将引导件通过下适配部安装在支柱124的下部末端。
图7示出了无菌围帘300的另一个实施方式。如图7所示,支柱下包覆部330可以设置有可开闭的侧密封接口331。图7中用加粗线示意性地示出处于闭合状态下的侧边密封接口331。侧边密封接口331能够沿与支柱124的长度方向对应的方向延伸。侧边密封接口331可以位于立柱的远离肢臂123的一侧。具体地,侧边密封接口331可以位于容纳部322所在侧,并且位于容纳部322的下方。侧边密封接口331的接合方式可以是粘接、拉合、热压或压合等方式中的一种或多种。侧边密封接口331的结构可以与密封接口311相同,为简洁起见,此处不再赘述。在该实施方式中,无菌围帘300在展开时可以形成一个平面。
除非另有定义,本文中所使用的技术和科学术语与本发明的技术领域的技术人员通常理解的含义相同。本文中使用的术语只是为了描述具体的实施目的,不是旨在限制本发明。本文中在一个实施方式中描述的特征可以单独地或与其它特征结合地应用于另一个实施方式,除非该特征在该另一个实施方式中不适用或是另有说明。
本发明已经通过上述实施例进行了说明,但应当理解的是,上述实施例只是用于举例和说明的目的,而非意在将本发明限制于所描述的实施例范围内。此外本领域技术人员可以理解的是,本发明并不局限于上述实施例,根据本发明的教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围以内。本发明的保护范围由附属的权利要求书及其等效范围所界定。
- 无菌围帘及具有其的手术机器人组件
- 医学透镜组件和具有透镜组件的无菌帘巾