基于指数幂次分布和矩阵分解的在线运动目标检测方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及图像处理技术领域,尤其是一种在线运动目标检测方法。
背景技术
大多数图像处理过程中是以对应运动区域的像素为基本,运动区域的有效检测对于目标分类、目标识别、目标跟踪以及行为分析等工作具有非常重要的意义,是计算机视觉和视频处理领域一个非常重要和有效的研究课题。同时,运动目标检测也是图像处理应用的一个重要分支,目前广泛应用于视频安防、交通监控、环境感知与机器人导航等领域。
刘仲民,何胜皎(《基于背景减除法的视频序列运动目标检测》,计算机应用,2017,37-6,1777-1781)中在对背景减除法的研究基础上,结合帧间差分法和背景减除法,判断像素点的运动状态,分别对静止和运动的像素点替换和更新,产生与实际背景接近的背景模型,且使用Otsu算法进行目标提取,并使用形态学中的闭运算去除噪声和冗余信息。但该方法仍是利用帧间差分法提取不完整的运动信息,且估计得到的背景精确性较低,难以满足纹理复杂及背景动态的情景下的检测问题。
发明内容
为了克服现有技术的不足,本发明提供一种基于指数幂次分布和矩阵分解的在线运动目标检测方法。针对现有的可见光视频序列中运动目标检测方法,大多数存在背景估计细节模糊、只适用固定形式的噪声分布及分割目标不完整的问题,本发明将每个视频帧的噪声/前景建模为一个单独的混合指数幂次分布(Mixture of Exponential Power,MoEP)模型,使其比传统鲁棒主成分分析(Robust Principal Component Analysis,RPCA)模型适应范围更大的噪声,且利用基于时间帧差的运动信息先验模型描述每一帧的权值矩阵,充分提取完整的运动目标区域,将低秩矩阵分解(Low-Rank Matrix Factorization,LRMF)表示为带约束的对数似然函数模型,利用EM(Expectation-Maximization)算法求解出混合指数幂次分布模型的相关参数,且结合增广拉格朗日乘数法(Augmented LagrangeMultiplier method,ALM)技术及交替方向乘子(Alternating Direction Method ofMultipliers,ADMM)算法求解背景模型,提高背景估计的准确性,进而提高运动目标检测的精确度和完整度。针对动态背景的问题,依据局部空间运动信息后验算法来约束目标区域,相比较复杂的总变分、马尔可夫随机场及结构稀疏性算法来说,降低了后处理的复杂度,缩短了计算时间,从而实现对视频序列图像中的运动目标精确、快速的检测。
本发明解决其技术问题所采用的技术方案的具体步骤如下:
(1)对长度为n的视频序列F,随机抽取其中m帧作为样本,构建背景估计模型求解权值矩阵,利用增广拉格朗日算法(ALM)求取初始化的低秩矩阵分解(LRMF)模型;
首先,对当前样本中的帧f
对抽取的m帧视频序列构造数据矩阵
(2)对给定视频序列F构造视频数据矩阵
LRMF问题表示为:
其中,
x
其中,u
其中,
其中,E=(e
Ω是指X中背景元素的索引集;则对数似然函数表示为:
完全对数似然函数为:
选择EP混合数的有效方法,构建以下带有惩罚项的混合幂次指数分布模型:
其中,∈是一个很小的正数,∈=10
其中,
(3)为解决步骤(2)中最小化问题,提出一种EM算法求解基于运动目标检测的在线混合指数幂次分布模型:
假设Θ
从而构造出对应的Q函数:
在M-step最大化Q函数更新Θ,为了获得对π的更新,引入一个拉格朗日乘子τ强制约束
通过对式(21)中π
其中,
其中,
结合步骤(1)中对权值矩阵的求解,w
公式(24)是一个加权最小二乘问题,闭型解为:
v=(U
其中,mov
在更新子空间参数U时,需要解决子问题如下:
它的每个行向量都有一个闭型解:
为方便计算,令:
估计出当前帧X
L
同时根据混合指数幂次分布模型从干扰中估计出前景的掩膜E
E
其中,根据相关理论证明EP分布中方差最大的分布是目标,取EP分布中方差最大的区域为目标区域label
(4)根据步骤(3)获取的前景掩膜E
real_mov=E
其中,binary是二值化函数,将不等于0的像素值表示为1,其余表示为0;求出real_mov即为二值化的相邻两帧间的动目标,之后再对下一对相邻帧重复步骤(2)和步骤(3),直到遍历完所有的视频帧。
所述背景估计模型如下:
B
其中,mode是中值函数,mean是平均值函数,median是中位数函数,权值矩阵求解过程如下:
其中,D
所述求得数据矩阵P初始化的基矩阵U和系数矩阵V的求解步骤如下:
对于数据矩阵
其中,μ是正标量,Y是拉格朗日乘子,λ代表噪声所占权重,利用增广拉格朗日乘子法求解上述凸优化问题;结合
μ=ρμ (6)
其中,U
本发明有益效果在于:
(1)提出简单背景估计模型得到运动目标权值矩阵,对运动信息进行先验,提高算法对背景估计的准确性,且计算复杂度较低。
(2)在低秩矩阵分解模型的基础上,提出基于运动目标检测的混合指数幂次分布模型,结合提出的EM迭代优化算法推导出细节化的背景,通过拟合前景目标和干扰,较完整地提取运动目标,精确度较高。
(3)提出局部空间运动信息后验方法来再次约束目标区域,对运动区域进行一定的后验,再次滤除动态背景干扰,提高了对运动目标检测的效率。
附图说明
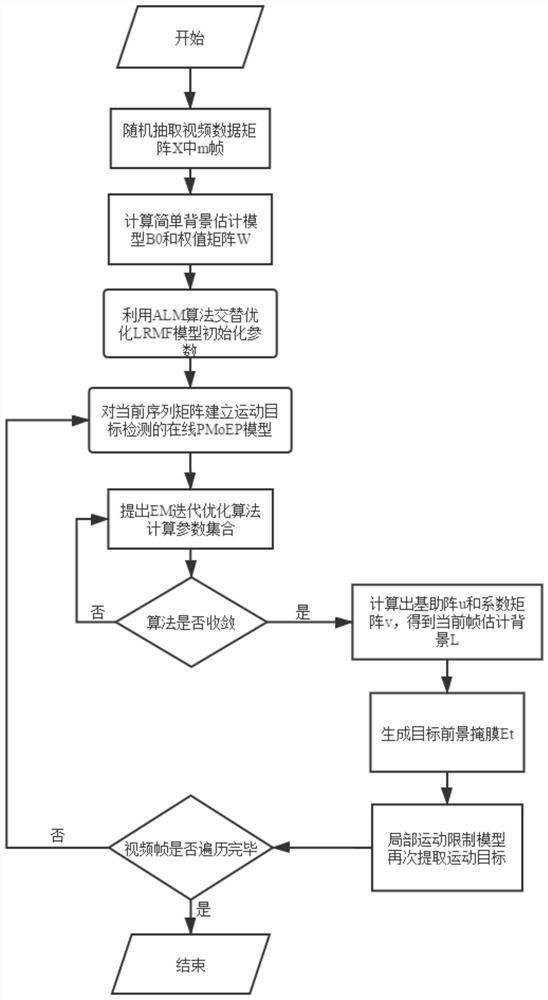
图1是本发明算法流程示意图。
图2是本发明算法检测结果示意图,图2(a)为原始视频帧,图2(b)为本发明的检测结果图。
具体实施方式
下面结合附图和实施例对本发明进一步说明。
本发明一种基于混合指数幂次分布和矩阵分解的在线运动目标检测方法基本流程如图1所示,利用实例说明本发明的具体实施方式,但本发明的技术内容不限于所述的范围,具体实施方式包括以下步骤:
步骤一、对给定视频序列F构造数据矩阵
(1)对长度为n的视频序列F,随机抽取其中m帧作为样本,对当前样本中的帧f
B
(2)通过当前帧f
其中,对于第一帧图像来说,其f
(3)求取初始化的低秩矩阵分解(LRMF)模型。对抽取的m帧视频序列构造数据矩阵
μ=ρμ
其中,U=L,V=S,μ是正标量。最后利用ADMM算法求得最终初始化的U和V。
步骤二、构造运动目标检测混合指数幂次分布(MoEP)模型,首先利用步骤一中对每帧图像求取权值矩阵W
(1)结合LRMF,建立混合指数幂次分布模型。首先,假设噪声eij服从混合指数幂次分布(MoEP),构造隐变量z
(2)利用EM算法求解基于运动目标检测的在线MoEP算法。在期望步(E-step)利用贝叶斯规则计算出计算eij的zijk的条件期望
(3)使用交替优化算法更新系数矩阵v和基矩阵u。利用步骤一中求解的权值矩阵和加权最小二乘法对v实现更新。利用ALM算法实现对子空间参数Ut的更新。
v=(U
利用上述步骤估计出当前帧Xt的背景Lt:
L
同时也根据混合指数幂次分布模型从干扰中估计出前景的掩膜Et:
E
步骤三、根据步骤二获取的前景掩膜Et,其中依旧包含了一部分动态背景。为了提高对动态背景的适应性,本专利提出局部运动限制模型,在已有的检测出的局部运动区域Et,结合步骤二中的mov矩阵,进行滤波后再次约束运动目标区域。
其具体过程表示为:
real_mov=E
其中,binary是二值化函数,将不等于0的像素值表示为1,其余表示为0。最终后处理方法再次限制了运动目标区域,检测结果如图2(b)中所示。可以看出,本发明滤除了大多数噪声和干扰,且检测出完整的目标区域。
- 基于指数幂次分布和矩阵分解的在线运动目标检测方法
- 一种基于变指数幂次趋近律的板球系统积分终端滑模控制方法