非机动车盗车行为的检测方法、装置及电子设备
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及人工智能技术领域,尤其涉及一种非机动车盗车行为的检测方法、装置及电子设备。
背景技术
图像识别是当前社区安防以及交通管理常用的技术之一,可以极大的提升社会安全感,例如:使用基于人脸识别的社区门禁系统或基于车牌图像识别的交通违法事件检测。由于很多的非机动车没有按交通管理要求办理上牌,使得非机动车的归属判定较为单一,即谁能打开该非机动车的锁,谁就能驾驶该非机动车,对于盗车行为难以判定,从而导致非机动车的容易被盗,且不易发现盗车人员,只有在车主报警后,相关人员对大量的监控数据进行分析,才能找到对应的线索。因此,现有技术中,无法实时有效地对非机动车的盗车行为进行检测。
发明内容
本发明实施例提供一种非机动车盗车行为的检测方法及装置、电子设备和计算机可读存储介质,能够更实时有效地对非机动车的盗车行为进行检测。
第一方面,本发明实施例提供一种非机动车盗车行为的检测方法,包括:
获取跟踪图像中的非机动车驾驶特征,所述非机动车驾驶特征包括非机动车特征以及与所述非机动车特征匹配的驾驶人员特征;
将所述非机动车驾驶特征输入到聚类引擎中,聚类得到基于所述非机动车驾驶特征的历史抓拍信息,所述历史抓拍信息包括对应的历史非机动车特征以及历史驾驶人员特征;
检测是否存在非机动车驾驶特征与对应历史抓拍信息不相同的情况,得到检测结果;
根据所述检测结果,判断是否存在盗车行为。
第二方面,本发明实施例提供一种非机动车盗车行为的检测装置,包括:
第一获取模块,用于获取跟踪图像中的非机动车驾驶特征,所述非机动车驾驶特征包括非机动车特征以及与所述非机动车特征匹配的驾驶人员特征;
聚类模块,用于将所述非机动车驾驶特征输入到聚类引擎中,聚类得到基于所述非机动车驾驶特征的历史抓拍信息,所述历史抓拍信息包括对应的历史非机动车特征以及历史驾驶人员特征;
检测模块,用于检测是否存在非机动车驾驶特征与对应历史抓拍信息不相同的情况;
判断模块,用于根据所述检测结果,判断是否存在盗车行为。
第三方面,本发明实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本发明实施例提供的非机动车盗车行为的检测方法中的步骤。
第四方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现本发明实施例提供的非机动车盗车行为的检测方法中的步骤。
本发明实施例中,获取跟踪图像中的非机动车驾驶特征,所述非机动车驾驶特征包括非机动车特征以及与所述非机动车特征匹配的驾驶人员特征;将所述非机动车驾驶特征输入到聚类引擎中,聚类得到基于所述非机动车驾驶特征的历史抓拍信息,所述历史抓拍信息包括对应的历史非机动车特征以及历史驾驶人员特征;检测是否存在非机动车驾驶特征与对应历史抓拍信息不相同的情况;根据所述检测结果,判断是否有驾驶人员存在盗车行为。由于对驾驶非机动车的人员以及非机动车进行识别以及聚类,可以检测到是否存在一人驾驶多车或一车多人驾驶的情况,从而根据这些情况来判断是否存在盗车行为,可以节省大量相关人员对监控数据的分析工作,可以实时有效地对盗车行为进行检测。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明实施例提供的一种非机动车交通违法监管方法的流程示意图;
图2是本发明实施例提供的另一种非机动车盗车行为的检测方法的流程示意图;
图3是本发明实施例提供的另一种非机动车盗车行为的检测方法的流程示意图;
图4是本发明实施例提供的另一种非机动车盗车行为的检测方法的流程示意图;
图5是本发明实施例提供的另一种非机动车盗车行为的检测方法的流程示意图;
图6是本发明实施例提供的另一种非机动车盗车行为的检测方法的流程示意图;
图7是本发明实施例提供的另一种非机动车盗车行为的检测方法的流程示意图;
图8是本发明实施例提供的一种非机动车盗车行为的检测装置的结构示意图;
图9是本发明实施例提供的另一种非机动车盗车行为的检测装置的结构示意图;
图10是本发明实施例提供的另一种非机动车盗车行为的检测装置的结构示意图;
图11是本发明实施例提供的另一种非机动车盗车行为的检测装置的结构示意图;
图12是本发明实施例提供的一种第一获取模块的结构示意图;
图13是本发明实施例提供的一种电子设备的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
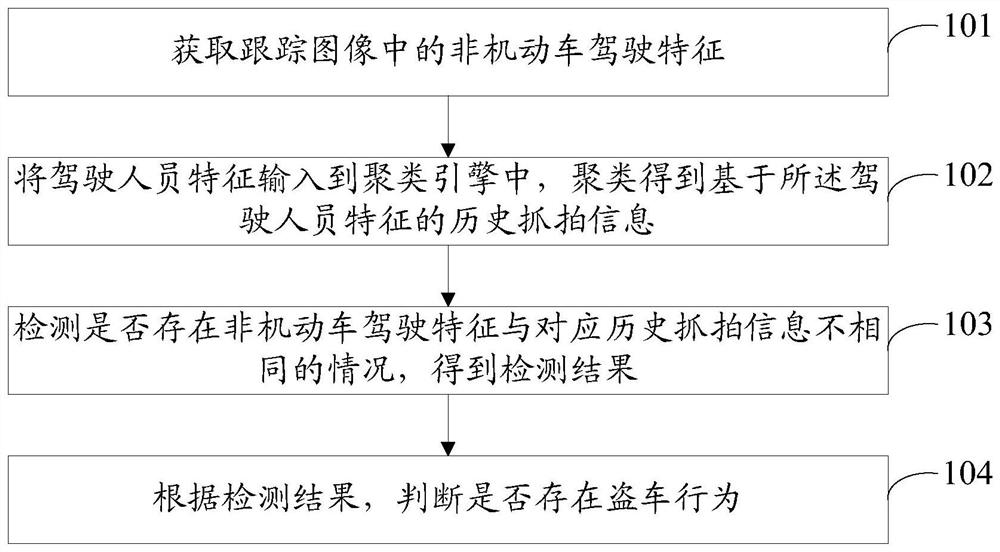
请参见图1,图1是本发明实施例提供的一种非机动车盗车行为的检测方法的流程示意图,如图1所示,包括以下步骤:
101、获取跟踪图像中的非机动车驾驶特征。
其中,上述的非机动车驾驶特征包括非机动车特征以及与所述非机动车特征匹配的驾驶人员特征,上述的非机动车驾驶特征可以理解为驾驶人员驾驶着非机动车的特征,上述的跟踪图像指的是包含非机动车特征及驾驶人员特征的连续图像。上述的跟踪图像可以是由图像采集设备进行采集,比如设置在社区内、社区门口的社区摄像头,或者是设置在路口、路边的交通摄像头进行采集,也可以是社区系统与交通系统联动对应的摄像头等。上述的非机动车可以是自行车、三轮车、电动车、平衡车、人力车等非机动车,上述非机动车特征可以是车头、把手、踏板、轮胎等非机动车特征。上述的驾驶人员特征可以是人脸特征,比如可以是面部轮廓、口、眼、鼻部等人脸特征。上述的非机动车特征与驾驶人员特征的匹配可以是根据非机动车特征与驾驶人员特征的距离进行匹配,也可以是根据非机动车特征与驾驶人员运动轨迹进行匹配。上述的非机动车驾驶特征的获取可以是将跟踪图像输入到目标跟踪引擎中,通过目标跟踪引擎对跟踪图像进行提取,提取出各图像帧的对应的非机动车特征以及驾驶人员特征,从而进行匹配,得到匹配后的非机动车特征以及驾驶人员特征,即得到非机动车的驾驶特征。具体的,在目标跟踪引擎中,可以使用卡尔曼滤波算法跟踪视频中出现的非机动车以及驾驶人员,提取对应的非机动车特征以及驾驶人员特征,从而进行匹配,得到非机动车驾驶特征。
需要说明的是,步骤101获取到非机动车驾驶特征可以包括一个或者多个非机动车特征,以及一个或者多个驾驶人员特征。另外,上述跟踪图像也可以称作视觉图像、视觉信息、视频图像、视频信息、连续视频帧、连续帧图像、监控录像、监控信息、监控图像等。
在一些可能的实施例中,上述的驾驶人员特征还可以包括人员的姿态特征,姿态特征可以是手部姿态、脚部姿态、上身姿态等姿态特征,通过分析人员的姿态特征,可以判断人员是否存在驾驶非机动车的情形,比如,可以通过姿态特征判断人员的手是否在把手上,判断人员的脚是否放在驾驶的位置等。也可以通过人员的姿态特征为非机动车匹配驾乘人员,姿态特征可以是手部姿态、脚部姿态、上身姿态等姿态特征,比如,可以通过判断把手上的手是属于哪个人员的姿态特征来匹配到非机动车的驾乘人员,可以通过判断踏板上的脚是属于哪个人员的姿态特征来匹配到非机动车的驾乘人员等,当然,在通过姿态特征来匹配到非机动车的驾乘人员时,还需要将姿态特征匹配到人员上,从而确定驾乘人员。可以将姿态特征与人脸特征进行关联匹配,从而将姿态特征匹配到对应人员上。
102、将非机动车驾驶特征输入到聚类引擎中,聚类得到基于非机动车驾驶特征的历史抓拍信息。
该步骤中,非机动车驾驶特征包括非机动车特征以及与所述非机动车特征匹配的驾驶人员特征,上述的历史抓拍信息包括对应的历史非机动车特征以及历史驾驶人员特征。上述的历史抓拍信息可以是预设时间内的历史抓拍信息,比如1个月内的抓拍信息,或者6个月内的抓拍信息。上述的非机动车驾驶特征可以是一个或多个,即是上述的非机动车特征可以是一个或多个,上述的驾驶人员特征可以是一个或多个,上述的一个非机动车特征只匹配一个驾驶人员特征。比如:跟踪图像中,包括有非机动车特征b1、b2、b3、b4,人员特征a1、a2、a3、a4、a5、a6,非机动车驾驶特征为1、2、3、4,非机动车驾驶特征1可以表示为非机动车特征b1与人员特征a1的匹配,此时,具有人员特征a1的人员可以称为驾驶人员,人员特征a1为驾驶人员特征a1;非机动车驾驶特征2可以表示为非机动车特征b2与人员特征a2的匹配,此时,具有人员特征a2的人员可以称为驾驶人员,人员特征a2为驾驶人员特征a2;以此类推,人员特征a3以及人员特征a4分别对应驾驶人员特征a3、a4;a5与a6则不属于驾驶人员特征。上述的聚类引擎可以根据一个驾驶人员特征聚类出该驾驶人员的历史抓拍信息,也可以根据一个非机动车特征聚类出该非机动车的抓拍信息,上述的聚类可以理解为将具有相同特征的物体聚集在一起。上述的历史抓拍信息可以是步骤101中采集设备所抓拍到针对目标非机动车特征或目标驾驶人员特征的历史抓拍信息,所述历史抓拍信息可以是存储在历史数据库中的定长或者变长的半结构化数据。在聚类的过程中,会根据对应的目标特征,在历史数据库中提取与目标特征相关的半结构化数据进行聚类。比如,驾驶人员A1、A2分别对应的驾驶人员特征为a1、a2,其驾驶的非机动车B1、B2对应的非机动车特征为b1、b2,可以根据驾驶人员特征a1在历史数据库提取相关驾驶人员A1的历史抓拍信息进行聚类;可以根据驾驶人员特征a2在历史数据库提取相关驾驶人员A2的历史抓拍信息进行聚类;可以根据非机动车特征b1在历史数据库中提取相关非机动车B1的历史抓拍信息进行聚类;可以根据非机动车特征b2在历史数据库中提取相关非机动车B2的历史抓拍信息进行聚类。
需要说明的是,上述的历史非机动车特征可以是车头、把手、踏板、轮胎等非机动车特征。上述的历史驾驶人员特征可以是历史人脸特征,比如可以是面部轮廓、口、眼、鼻部等人脸特征。
103、检测是否存在非机动车驾驶特征与对应历史抓拍信息不相同的情况,得到检测结果。
该步骤中,非机动车驾驶特征包括非机动车特征以及与所述非机动车特征匹配的驾驶人员特征,上述的历史抓拍信息包括对应的历史非机动车特征以及历史驾驶人员特征。上述的检测可以是检测同一非机动车特征下,对应驾驶人员特征是否与历史驾驶人员特征相同,也可以是检测同一驾驶人员特征下,对应非机动车特征是否与历史非机动车特征相同。比如,假设上述的非机动车驾驶特征为(a1,b1),上述的a1对应于驾驶人员A1的驾驶人员特征,上述的b1对应于非机动车B1的非机动车特征,上述驾驶人员A1驾驶非机动车B1,检测同一非机动车特征下,对应驾驶人员特征是否与历史驾驶人员特征相同可以是:若检测到b1对应的历史抓拍信息为(a1,b1)、(a1,b1)、(a1,b1)、(a1,b1),则表示非机动车B1的非机动车特征b1对应的驾驶人员一直是A1,即表示对应驾驶人员特征与历史驾驶人员特征相同。若检测到b1对应的历史抓拍信息为(a2,b1)、(a3,b1)、(a4,b1)、(a4,b1),则表示非机动车特征b1对应的驾驶人员并不一直是A1,即表示对应驾驶人员特征与历史驾驶人员特征不相同。上述的检测同一驾驶人员特征下,对应非机动车特征是否与历史非机动车特征可以是:若检测到a1对应的历史抓拍信息为(a1,b1)、(a1,b1)、(a1,b1)、(a1,b1),则表示驾驶人员A1的驾驶人员特征a1对应的非机动车一直是B1,即表示驾驶人员A1对应非机动车特征与历史非机动车特征相同。若检测到a1对应的历史抓拍信息为(a1,b2)、(a1,b3)、(a1,b4)、(a1,b5),则表示驾驶人员A1的驾驶人员特征a1对应的非机动车一直是在改变的,即表示驾驶人员A1对应非机动车特征与历史非机动车特征不相同。上述的检测可以是将非机动车特征与历史非机动车特征进行相似度的逐一比对,当有历史非机动车特征与非机动车特征的相似度大于或等于非机动车相似度阈值时,则可以认为非机动车特征与该历史非机动车特征是相同的,当有历史非机动车特征与非机动车特征的相似度小于非机动车相似度阈值时,则可以认为非机动车特征与该历史非机动车特征是不相同的。同样的,上述的检测可以是将驾驶人员特征与历史驾驶人员特征进行相似度的逐一比对,当有历史驾驶人员特征与驾驶人员特征的相似度大于或等于驾驶人员相似度阈值时,则可以认为驾驶人员特征与该历史驾驶人员特征是相同的,当有历史驾驶人员特征与驾驶人员特征的相似度小于驾驶人员相似度阈值时,则可以认为驾驶人员特征与该历史驾驶人员特征是不相同的。
104、根据检测结果,判断是否存在盗车行为。
上述的检测结果包括步骤103中的四种,第一种:同一非机动车特征下,对应驾驶人员特征与历史驾驶人员特征相同;第二种:同一非机动车特征下,对应驾驶人员特征与历史驾驶人员特征不相同;第三种:同一驾驶人员特征下,对应非机动车特征与历史非机动车特征相同;第四种:同一驾驶人员特征下,对应非机动车特征与历史非机动车特征不相同。在第一种检测结果中,由于驾驶人员特征与历史驾驶人员特征是相同的,可以说明该非机动车特征对应的机动车一直是由该驾驶人员特征对应的驾驶人员进行驾驶,可以认为不存在盗车行为。在第二种检测结果中,由于驾驶人员特征与历史驾驶人员特征是不相同的,可以说明该非机动车特征对应的机动车一直是在由不同驾驶人员进行驾驶,该非机动车一直在被转手,可以认为存在盗车行为。在第三种检测结果中,由于非机动车特征与历史非机动车特征是相同的,可以说明该驾驶人员特征对应的驾驶人员一直驾驶同一辆非机动车,可以认为不存在盗车行为。在第四种检测结果中,由于非机动车特征与历史非机动车特征是不相同的,可以说明该驾驶人员特征对应的驾驶人员一直驾驶不同非机动车,可以认为存在盗车行为。
在一些可能的实施例中,当出第三种检测结果时,还可以对非机动车进行进一步的识别,识别该非机动车是否为共享非机动车,如果识别得到该非机动车为非共享非机动车,则可以认为存在盗车行为,如果识别得到该非机动车为共享非机动车,则可以认为不存在盗车行为。
需要说明的是,本发明实施例提供的非机动车盗车行为的检测方法可以应用于非机动车盗车行为的检测设备,例如:社区摄像头、交通摄像头、计算机、服务器等可以进行非机动车盗车行为的检测的设备。
本发明实施例中,由于对驾驶非机动车的人员以及非机动车进行识别以及聚类,可以检测到是否存在一人驾驶多车或一车多人驾驶的情况,从而根据这些情况来判断是否存在盗车行为,可以节省大量相关人员对监控数据的分析工作,可以实时有效地对盗车行为进行检测。
可选的,请参见图2,图2是本发明实施例提供的另一种非机动车盗车行为的检测方法的流程示意图,如图2所示,包括以下步骤:
201、获取跟踪图像中的非机动车驾驶特征。
其中,上述非机动车驾驶特征包括非机动车特征以及与非机动车特征匹配的驾驶人员特征。
202、将驾驶人员特征输入到聚类引擎中,聚类得到基于所述驾驶人员特征的历史抓拍信息。
其中,历史抓拍信息包括对应的历史非机动车特征以及历史驾驶人员特征。
203、检测是否存在同一驾驶人员特征对应的非机动车特征与历史非机动车特征不相同的情况。
204、若检测到存在同一驾驶人员特征对应的非机动车特征与历史非机动车特征不相同,则判断有驾驶人员存在盗车行为。
在本实施例中,步骤202对驾驶人员特征进行聚类,上述的驾驶人员特征可以是人脸特征,上述的人脸特征也可以称为人脸图像,将上述的人脸特征输入到聚类引擎中,通过聚类引擎在历史数据库中提取具有相同人脸特征的历史抓拍数据,当驾驶人员存在多个时,还可以根据不同人脸特征建立不同的驾驶人员档案,用于存放提取到的对应的历史抓拍数据,从而完成基于驾驶人员特征的聚类。由于是基于驾驶人员特征完成的聚类,所以每个类别是以驾驶人员特征为区分,可以理解为,每一类都是同一个驾驶人员所对应的历史抓拍信息。比如,驾驶人员特征分别为a1、a2、a3,分别对应驾驶人员A1、A2、A3,根据a1聚类得到的是驾驶人员A1的历史抓拍信息,根据a2聚类得到的是驾驶人员A2的历史抓拍信息,根据a3聚类得到的是驾驶人员A3的历史抓拍信息。
上述步骤203中的检测,可以将同一驾驶人员对应的非机动车特征与其历史抓拍信息中的历史非机动车特征进行相似度的逐一比对,从而判断该非机动车特征与历史非机动车特征是否相同。具体的,当有历史非机动车特征与该非机动车特征的相似度达到相似度阈值(比如99%)时,可以认为该历史非机动车特征与该非机动车特征是相同的;当有历史非机动车特征与该非机动车特征的相似度没有达到相似度阈值(比如99%)时,可以认为该历史非机动车特征与该非机动车特征是不相同的。对跟踪图像中的每一个驾驶人员都进行检测,从而得到每一个驾驶人员的检测结果。
在步骤204中,由于同一驾驶人员特征下,对应非机动车特征与历史非机动车特征是不相同的,可以说明该驾驶人员特征对应的驾驶人员一直驾驶不同非机动车,可以认为该驾驶人员存在盗车行为。
上述的步骤中,通过驾驶人员特征进行聚类,得到同一驾驶人员的历史抓拍信息,可以分析该驾驶人员是否存在盗车行为。另外,在同一驾驶人员存在驾驶不同非机动车的情况下,可以认为该驾驶人员存在盗车行为。通过对驾驶人员特征进行聚类,可以快速的检测出是否有驾驶人员存在盗车行为,提高检测的效率。
可选的,请参见图3,图3是本发明实施例提供的另一种非机动车盗车行为的检测方法的流程示意图,如图3所示,包括以下步骤:
301、获取跟踪图像中的非机动车驾驶特征。
其中,上述非机动车驾驶特征包括非机动车特征以及与非机动车特征匹配的驾驶人员特征。
302、将非机动车特征输入到聚类引擎中,聚类得到基于所述非机动车特征的历史抓拍信息。
其中,历史抓拍信息包括对应的历史非机动车特征以及历史驾驶人员特征。
303、检测是否存在同一非机动车对应的驾驶人员特征与历史驾驶人员特征不相同的情况。
304、若检测到存在同一非机动车对应的驾驶人员特征与历史驾驶人员特征不相同,则判断存在盗车行为。
在本实施例中,步骤302对非机动车特征进行聚类,将上述的非机动车特征输入到聚类引擎中,通过聚类引擎在历史数据库中提取具有相同非机动车特征的历史抓拍数据,当驾驶人员与对应驾驶的非机动车存在多个时,还可以根据不同非机动车特征建立不同的非机动车档案,用于存放提取到的对应的历史抓拍数据,从而完成基于非机动车特征的聚类。由于是基于非机动车特征完成的聚类,所以每个类别是以非机动车特征为区分,可以理解为,每一类都是同一辆非机动车所对应的历史抓拍信息。比如,非机动车特征分别为b1、b2、b3,分别对应非机动车B1、B2、B3,根据b1聚类得到的是非机动车A1的历史抓拍信息,根据b2聚类得到的是非机动车B2的历史抓拍信息,根据b3聚类得到的是非机动车B3的历史抓拍信息。
上述步骤303中的检测,可以将同一非机动车对应的驾驶人员特征与其历史抓拍信息中的历史驾驶人员特征进行相似度的逐一比对,从而判断该驾驶人员特征与历史驾驶人员特征是否相同。具体的,当有历史驾驶人员特征与该驾驶人员特征的相似度达到相似度阈值(比如99%)时,可以认为该历史驾驶人员特征与该驾驶人员特征是相同的;当有历史驾驶人员特征与该驾驶人员特征的相似度没有达到相似度阈值(比如99%)时,可以认为该历史驾驶人员特征与该驾驶人员特征是不相同的。对跟踪图像中的每一辆非机动车都进行检测,从而得到每一辆非机动车的检测结果。上述的驾驶人员特征可以是人脸特征,上述的历史驾驶人员特征可以是历史抓拍到的人脸特征。
在步骤304中,由于同一非机动车特征下,对应驾驶人员特征与历史驾驶人员特征是不相同的,可以说明该非机动车特征对应的非机动车一直由不同驾驶人员驾驶,可以认为该非机动车存在被盗情况(非机动车转手频繁),同时,可以认为驾驶该被盗非机动车的驾驶人员存在盗车行为,以及历史驾驶人员也存在盗车行为。
在一些可能的实施例中,由于共享非机动车也具有不同驾驶人员驾驶情况,所以在判断是否存在盗车行为前,可以先对非机动车进行识别,判断非机动车是否为共享非机动车,若为共享非机动车,则不做盗车行为的判断,或者直接认为不存在盗车行为,节省计算资源。在另一些可能的实施例中,共享非机动车的识别判断可以在跟踪图像中进行判断,从而可以避免对共享非机动车进行聚类,进一步节省计算资源。
上述的步骤中,通过非机动车特征进行聚类,得到同一非机动车的历史抓拍信息,可以分析该非机动车是否存在被盗情况。另外,在同一非机动车存在不同驾驶人员驾驶的情况下,可以认为该非机动车存在被盗情况。通过对非机动车特征进行聚类,可以快速的检测出是否有非机动车存在被盗情况,从而分析到盗车人员,提高检测的效率。
可选的,请参见图4,图4是本发明实施例提供的另一种非机动车盗车行为的检测方法的流程示意图,如图4所示,包括以下步骤:
401、获取跟踪图像中的非机动车驾驶特征。
其中,上述非机动车驾驶特征包括非机动车特征以及与非机动车特征匹配的驾驶人员特征,上述的驾驶人员特征包括人脸特征。
402、将非机动车驾驶特征输入到聚类引擎中,聚类得到基于非机动车驾驶特征的历史抓拍信息。
其中,历史抓拍信息包括对应的历史非机动车特征以及历史驾驶人员特征。
403、检测是否存在非机动车驾驶特征与对应历史抓拍信息不相同的情况。
404、根据检测结果,判断是否存在盗车行为。
405、在判断存在盗车行为后,获取存在盗车行为的驾驶人员对应的同行信息。
406、根据所述同行信息,构建关于所述存在盗车行为的驾驶人员的关系图谱。
其中,步骤405中的同行信息指的是与驾驶人员被抓拍在同一张图像中的人员信息,上述的同行信息可以是步行,也可以是驾驶非机动车同行。上述的同行信息可以是预设时间的同行信息,比如,1个月内的同行信息,6个月内的同行信息等。上述的同行信息包括同行次数以及同行人员信息。上述的同行信息可以在同行数据库中获取,其中,上述的同行数据库中存储有被抓拍人员的同行档案,上述的同行档案中记录有该被抓拍人员与同行人员的同行图像数据,同行图像数据包括同行地点、同行时间等。具体的,获取存在盗车行为的驾驶人员的人脸特征,通过驾驶人员的人脸特征在同行数据库中搜索该驾驶人员的同行档案,得到对应同行信息。
在步骤406中,关系图谱包括同行次数以及同行人员信息,所述关系图谱用于展示同行人员与存在盗车行为的驾驶人员的同行关系。上述的关系图谱可以是以驾驶人员的人脸图像为中心点,同行人员的人脸图像为连接点形成的连接关系图像,每根连接线代表驾驶人员与一位同行人员的同行关系,同行次数可以显示在连接线上,也可以显示在对应同行人员的人脸图像边上。
在一种可能的实施例中,在关系图谱中,只显示与驾驶人员同行次数超过预先设定的次数阈值的同行人员,比如,只显示与驾驶人员同行超过5次的同行人员。
需要说明的是,上述的步骤405以及步骤406为可选的,在一些可能的实施例中,只需要判断盗车行为做为研判的依据即可。另外,上述的步骤405以及步骤406也可以与图2、图3对应的实施例进行结合。
在以上步骤中,通过获取盗车人员(指存在盗车行为的驾驶人员)的同行信息,形成盗车人员的关系图谱,可以直观地展示盗车人员的社交关系,从而方便相关警务人员对盗车人员团伙进行分析挖掘。
可选的,请参见图5,图5是本发明实施例提供的另一种非机动车盗车行为的检测方法的流程示意图,如图5所示,包括以下步骤:
501、获取跟踪图像中的非机动车驾驶特征。
其中,上述非机动车驾驶特征包括非机动车特征以及与非机动车特征匹配的驾驶人员特征,上述的驾驶人员特征包括人脸特征。
502、将非机动车驾驶特征输入到聚类引擎中,聚类得到基于非机动车驾驶特征的历史抓拍信息。
其中,历史抓拍信息包括对应的历史非机动车特征以及历史驾驶人员特征。
503、检测是否存在非机动车驾驶特征与对应历史抓拍信息不相同的情况。
504、根据检测结果,判断是否存在盗车行为。
505、在判断存在盗车行为后,获取存在盗车行为的驾驶人员对应的同行信息。
506、根据所述同行信息,构建关于所述存在盗车行为的驾驶人员的关系图谱。
507、将同行人员信息与前科人员库进行比对。
508、根据比对结果对关系图谱进行调整,得到具有盗车行为的嫌疑人员关系图谱。
在步骤507中,前科人员库可以包括盗车人员前科信息,进一步的,上述的盗车人员前科信息指的是盗取非机动车的盗车人员前科信息,上述的前科信息包括盗车人员信息以及盗车行为信息,上述的盗车行为信息包括盗车时间、盗车地点、所盗车型等信息,上述的盗车人员信息包括人脸特征以及身份信息等信息。上述的身份信息可以是姓名、身份证号、年龄、出生日期等信息。上述的同行人员信息包括人脸特征以及身份信息等信息。上述的比对可以是人脸特征的比对,也可以是身份信息的比对。具体的,可以将同行人员的人脸特征在前科人员库中与盗车人员的人脸特征进行比对,也可以是将同行人员的身份信息在前科人员库中与盗车人员的身份信息进行比对。
在步骤507中,将同行人员信息在前科人员库中进行比对后,若同行人员信息对应的同行人员为前科人员库中的前科人员,则在上述的关系图谱进行调整,上述的调整可以是将该同行人员与驾驶人员的连接线进行突出显示,比如普通同行关系为灰色的连接线,与前科人员的同行关系为红色连接线,或者是直接对该同行人员的人脸图像进行标注,标注其为前科人员,从而得到嫌疑人员关系图谱。上述的嫌疑人员关系图谱用于展示盗车嫌疑较大的同行人员,比如前科人员,比如同行次数超过50次的同行人员。
需要说明的是,上述的步骤505以及步骤506为可选的,在一些可能的实施例中,只需要判断盗车行为做为研判的依据即可。另外,上述的步骤505以及步骤506也可以与图2、图3对应的实施例进行结合。
在以上步骤中,通过获取盗车人员(指存在盗车行为的驾驶人员)的同行信息,形成盗车人员的关系图谱,可以直观地展示盗车人员的社交关系,从而方便相关警务人员对盗车人员团伙进行分析挖掘。另外,查询同行人员是否为前科人员,得到嫌疑人员关系图谱,进一步的直观展示盗车人员的社交关系,从而方便相关警务人员对盗车人员团伙进行进一步的分析挖掘。
可选的,请参见图6,图6是本发明实施例提供的另一种非机动车盗车行为的检测方法的流程示意图,如图6所示,包括以下步骤:
601、获取跟踪图像中的非机动车驾驶特征。
其中,上述非机动车驾驶特征包括非机动车特征以及与非机动车特征匹配的驾驶人员特征,上述的驾驶人员特征包括人脸特征。
602、将非机动车驾驶特征输入到聚类引擎中,聚类得到基于非机动车驾驶特征的历史抓拍信息。
其中,历史抓拍信息包括对应的历史非机动车特征以及历史驾驶人员特征。
603、检测是否存在非机动车驾驶特征与对应历史抓拍信息不相同的情况。
604、根据检测结果,判断是否存在盗车行为。
605、在判断存在盗车行为后,持续对存在盗车行为的驾驶人员进行抓拍,获取对应的抓拍信息。
606、根据所述抓拍信息,形成针对所述存在盗车行为的驾驶人员的轨迹。
在步骤605中,持续对该存在盗车行为的驾驶人员进行抓拍可以理解为对该驾驶人员进行跟踪,也就是通过设置在多个地方的摄像头对该驾驶人员进行跟踪抓拍。上述的抓拍信息包括该驾驶人员的人脸特征、抓拍时间、抓拍地点,上述的抓拍地点可以等同于摄像头的安装地点。
在步骤606中,根据上述的抓拍时间与抓拍地点,可以得到该驾驶人员的轨迹,上述轨迹用于分析该驾驶人员出现过的地点,上述的轨迹可以理解为该驾驶人员在什么时间段内,从哪个地方移动到哪个地方,移动路线是怎么样的。比如,抓拍时间为12点11分,抓拍地点为某小区后门;抓拍时间为12点30分,抓拍地点为A路口;抓拍时间为12点50分,抓拍地点为B路口;抓拍时间为13点15分,抓拍地点为某二手车行。则形成的轨迹为:某小区后门→A路口→B路口→某二手车行。可以通过上述的轨迹对盗车人员进行分析,比如分析销脏点在哪里,分析团伙人员的聚集点在哪里等。比如,在A路口时间,该驾驶人员还驾驶盗取来的非机动车,在B路口时,该驾驶人员已经不驾驶该盗取来的非机动车了,可以得到销脏点在A路口与B路口之间,通过计算该驾驶人员在A路口的速度与在B路口的速度,结合该驾驶人员从A路口到B路口的时间,以及A路口到B路口的路程,计算出销脏点的更精确的位置。可以通过驾驶人员驾驶盗取来的非机动车与其他人同行,同行到某个地点后消失,判断团伙人员的聚集点的位置在该某个地点附近。
需要说明的是,上述的步骤605以及步骤606为可选的,在一些可能的实施例中,只需要判断盗车行为做为研判的依据即可。另外,上述的步骤605以及步骤606也可以与图2、图3对应的实施例进行结合。
在以上步骤中,通过对盗车人员(指存在盗车行为的驾驶人员)进行持续抓拍,获取盗车人员的轨迹,可以直观地展示盗车人员的移动轨迹,从而方便相关警务人员对盗车人员团伙聚集点或销脏点进行分析挖掘。
可选的,请参见图7,图7是本发明实施例提供的另一种非机动车盗车行为的检测方法的流程示意图,如图7所示,包括以下步骤:
701、获取跟踪图像中的非机动车运动信息以及人员运动信息。
702、根据非机动车运动信息及人员运动信息为非机动车特征匹配对应驾驶人员特征,形成非机动车驾驶特征。
其中,上述非机动车驾驶特征包括非机动车特征以及与非机动车特征匹配的驾驶人员特征,上述的驾驶人员特征包括人脸特征。
703、将非机动车驾驶特征输入到聚类引擎中,聚类得到基于非机动车驾驶特征的历史抓拍信息。
其中,历史抓拍信息包括对应的历史非机动车特征以及历史驾驶人员特征。
704、检测是否存在非机动车驾驶特征与对应历史抓拍信息不相同的情况。
705、根据检测结果,判断是否存在盗车行为。
其中,上述非机动车特征的运动信息可以是非机动车特征的速度或是轨迹,上述人脸特征的运动信息可以是人脸特征的速度或是轨迹。在图像识别技术中,待识别的特征会被做成一个特征框,比如,非机动车特征及人脸特征会被分别做成非机动车特征框和人脸特征框,非机动车特征的运动信息可以体现为非机动车特征框的运动信息,人脸特征的运动信息可以体现为人脸特征框的运动信息,可以通过获取非机动车特征框预设范围内的人脸特征框,来获取在非机动车特征预设范围内的人脸特征,这个预设范围在图像上可以是非机动车特征框的像素半径,也可以尺寸半径,比如,可以获取非机动车特征100像素半径内的人脸特征,又比如,可以获取人脸特征框中心到非机动车特征框中心距离小于200像素的人脸特征框。可以通过非机动车特征的运动信息及在非机动车特征预设范围内的人脸特征的运动信息,提取运动信息与非机动车特征的运动信息最接近或是相同的人脸特征,做为驾驶人员所拥有的人脸特征,也就可以匹配出驾驶人员。例如,假设非机动车特征为B,B的运动信息为C,在B的预设范围内存在人脸特征A1、A2、A3,A1、A2、A3的运动信息分别为D1、D2、D3,在D1、D2、D3中选取最接近C的一个,如果是D1最接近C,则D1对应的人脸特征为A1,则匹配拥有人脸特征A1的人员为驾驶人员,例中的C、D1、D2、D3可以是速度,也可以是轨迹,还可以是距离。
可选的,所述根据非机动车特征的运动信息及预设范围内的人脸特征的运动信息为非机车匹配驾驶人员,包括:根据非机动车特征的运动信息及预设范围内的人脸特征的运动信息,形成人脸集;根据所述人脸集为所述非机车匹配驾驶人员。
具体的,非机动车特征的运动信息可以是非机动车特征的速度或是轨迹,上述人脸特征的运动信息可以是人脸特征的速度或是轨迹,上述人脸集为在非机动车特征预设范围内的人脸特征集合,人脸集可以用特定的数字或字母标号进行标识,比如人脸集E,人脸集1等,也可以用非机动车特征的特征值来进行标识,比如非机动车特征为B,则对人脸集标识为人脸集B,也可以用在图像上特征框的颜色进行标识,比如在图像上一个非机动车特征的特征框为绿色,则对其预设范围内的人脸特征的特征框也做绿色框,而人脸集可以绿色的代表标识G来进行标识。在步骤202中,对非机动车特征及人脸特征进行视觉跟踪,可以获取到多帧图像。通过多帧图像,可以计算得到非机动车特征的运动信息和人脸特征的运动信息,在非机动车特征的预设范围内,提取出运动信息与非机动车特征的运动信息相近的人脸特征,形成人脸集。预设范围可以图像上的像素半径,也可以是尺寸半径,人脸特征的运动信息与非机动车特征的运动信息相近,可以是非机动车特征的运动信息阈值,比如可以是非机动车特征的速度阈值区间,当人脸特征的速度落入非机动车特征的速度阈值区间时,可以将人脸特征的运动信息与非机动车特征的运动信息看成相近。例如:非机动车特征的速度阈值区间为30码到35码,则当人脸特征的速度为33码时,可以将人脸特征的速度与非机动车特征的速度看成相近,从而将人脸特征的运动信息与非机动车特征的运动信息看成相近。非机动车特征的速度阈值区间可以通过非机动车特征的速度来进行设置。人脸特征的运动信息与非机动车特征的运动信息相近,也可以是非机动车特征及人脸特征的轨迹相似度阈值,当人脸特征的轨迹与非机动车特征的轨迹相似度达到轨迹相似度阈值,可以将人脸特征的运动信息与非机动车特征的运动信息看成相近。例如:非机动车特征及人脸特征的轨迹相似度阈值可以设置为80%,当人脸特征的轨迹与非机动车特征的轨迹相似度达到轨迹相似度超过80%,则可将人脸特征的运动信息与非机动车特征的运动信息看成相近。
在一些可能的实施例中,在每帧图像中,都可以形成一个人脸集,多帧图像可以得到多个人脸集,对多个人脸集求交集,得到最终人脸集,本实施例并不限定每帧图像形成一个人脸集,也可以是部分帧图像形成人脸集,比如200帧图像,可以提取其中两帧形成2个人脸集。通过求交集得到的最终人脸集中的人脸特征,为在视觉跟踪过程中一直存在于非机动车特征预设范围内的人脸特征,也可以说是在非机动车行驶过程与非机动车保持近一定距离的人脸特征。例如:假设在视觉跟踪中获取到400帧图像,提取其中第100帧、第200帧、第300帧、第400帧共4帧图像分别形成4个人脸集E1、E2、E3、E4,E1中包括人脸特征A1、A2、A3、A4,E2包括人脸特征A1、A2、A4、A5,E3包括人脸特征A1、A2、A5、A6,E4包括人脸特征A1、A2、A4、A6,则对E1、E2、E3、E4求交集的最终人脸集E中包括人脸特征A1、A2,可以在最终人脸集E中匹配驾驶人员,此时,可以通过将人脸特征A1和A2的运动信息与非机动车特征的运动信息进行比对,将运动信息与非机动车特征的运动信息最接近的人脸特征匹配为驾驶人员所拥有的人脸特征。
可选的,所述非机动车特征的运动信息包括非机动车特征的速度,所述人脸特征的运动信息包括人脸特征的速度;根据非机动车特征的运动信息及预设范围内的人脸特征的运动信息,形成人脸集,包括:对比所述非机动车特征的速度与所述人脸特征的速度,得到速度对比结果;根据所述速度对比结果,形成所述人脸集。
具体的,对非机动车特征及人脸特征进行视觉跟踪,可以获取到多帧图像。通过多帧图像,可以计算得到非机动车特征的速度和人脸特征的速度,在非机动车特征的预设范围内,提取出速度与非机动车特征的速度相近的人脸特征,形成人脸集。非机动车特征的速度与人脸特征的速度可以通过图像识别技术的中特征框中心点在图像中位置变化和时间计算得到,预设范围可以图像上的像素半径,也可以是尺寸半径,人脸特征的速度与非机动车特征的速度相近,可以是非机动车特征的速度阈值,比如可以是非机动车特征的速度阈值区间,将人脸特征的速度与非机动车特征的速度阈值区间进行对比,当人脸特征的速度落入非机动车特征的速度阈值区间时,可以将人脸特征的速度与非机动车特征的速度看成相近,例如:非机动车特征的速度阈值区间为30码到35码,假设人脸特征A1的速度为33码,人脸特征A2的速度为34码,人脸特征A3的速度为29码,可以将人脸特征A1和A2的速度与非机动车特征的速度看成相近,从而将人脸特征A1和A2记录进入人脸集中,这样,可以除掉一些明显不是该机动车驾驶人员的人员,比如拥有人脸特征A3的人员,人脸集中只有人脸特征A1和A2,使人脸集中的人脸特征元素得到精减,在匹配时只需要计算人脸集中的人脸特征A1和A2,减少通过人脸集匹配驾驶人员的计算量。当形成的人脸集为空集时,可以通过增加非机动车特征的预设范围和/或扩大非机动车特征的速度阈值区间来使人脸集成为非空人脸集。
可选的,所述非机动车特征的运动信息包括非机动车特征的轨迹,所述人脸特征的运动信息包括人脸特征的轨迹;根据所述非机动车特征的运动信息及预设范围内的人脸特征的运动信息,形成人脸集,包括:对比所述非机动车特征的轨迹与所述人脸特征的轨迹,得到轨迹对比结果;根据所述轨迹对比结果,形成所述人脸集。
具体的,轨迹对比结果可以是人脸特征的轨迹与非机动车特征的轨迹的轨迹重合度,比如,将人脸特征的特征框中心在连续图像中的轨迹与非机动车特征的特征框中心在连续图像中的轨迹以同一端点起始进行比对,计算人脸特征的轨迹与非机动车特征的轨迹重合长度与人脸特征的轨迹与非机动车特征的轨迹总长度的比例,得到重合度,例如:假设人脸特征的轨迹长度为49,非机动车特征的轨迹长度为51,重合部分长度为45,重合度则为45*2/(49+51)*100%=90%。如果重合度90%大于人脸特征的轨迹与非机动车特征的轨迹的轨迹重合度阈值,则可以将人脸特征记录进入人脸集中。
另外,轨迹对比结果也可以是人脸特征的轨迹与非机动车特征的轨迹的轨迹方程的对比结果,比如,可以两个轨迹方程中常量的比值或是差值等,比值越接近1,说明两个轨迹方程越相似,差值越接近0,说明两个轨迹方程越相似。
可选的,根据所述人脸集为所述非机车匹配驾驶人员包括:检测所述人脸集人脸特征的数量,判断所述人脸集中是否存在多个人脸特征;若存在多个人脸特征,则在所述多个人脸特征中选取与所述非机动车特征像素最近的人脸特征确定为所述驾驶人员的人脸特征,得到所述非机动车的驾驶人员。
具体的,像素最近可是在图像中人脸特征的特征框中心与非机动车特征的特征框中心之间的像素间隔最小,也可以人脸特征的特征框边框与非机动车特征的特征框中心之间的像素间隔最小。
另外,若人脸集中不存在多个人脸特征,也就是说,人脸集中的人脸特征唯一,可以直接认为该唯一存在于人脸集中的人脸特征是属于驾驶人员的,从而确定驾驶人员。
在一些可能的实施例中,若人脸集中存在多个人脸特征,可以在多个人脸特征中选取与非机动车特征尺寸最近的人脸特征确定为驾驶人员的人脸特征,得到非机动车的驾驶人员。另外,可以选取图像质量最高的人脸特征确定为驾驶人员的人脸特征。
在以上步骤中,通过对非机动车与驾驶人员进行匹配,为非机动车匹配唯一的驾驶人员,可以避免其他人员参与进行来造成误检测。
请参见图8,图8是本发明实施例提供的一种非机动车盗车行为的检测装置的结构示意图,如图8所示,装置包括:
第一获取模块801,用于获取跟踪图像中的非机动车驾驶特征,所述非机动车驾驶特征包括非机动车特征以及与所述非机动车特征匹配的驾驶人员特征;
聚类模块802,用于将所述非机动车驾驶特征输入到聚类引擎中,聚类得到基于所述非机动车驾驶特征的历史抓拍信息,所述历史抓拍信息包括对应的历史非机动车特征以及历史驾驶人员特征;
检测模块803,用于检测是否存在非机动车驾驶特征与对应历史抓拍信息不相同的情况;
判断模块804,用于根据所述检测结果,判断是否存在盗车行为。
可选的,如图8所示,聚类模块802还用于将驾驶人员特征输入到聚类引擎中,聚类得到基于所述驾驶人员特征的历史抓拍信息;
检测模块803还用于检测是否存在同一驾驶人员特征对应的非机动车特征与历史非机动车特征不相同的情况;
判断模块804还用于若检测到存在同一驾驶人员特征对应的非机动车特征与历史非机动车特征不相同,则判断有驾驶人员存在盗车行为。
可选的,如图8所示,聚类模块802还用于将所述非机动车特征输入到聚类引擎中,聚类得到基于所述非机动车特征的历史抓拍信息;
检测模块803还用于检测是否存在同一非机动车对应的驾驶人员特征与历史驾驶人员特征不相同的情况;
判断模块804还用于若检测到存在同一非机动车对应的驾驶人员特征与历史驾驶人员特征不相同,则判断存在盗车行为。
可选的,如图9所示,所述装置还包括:
第二获取模块807,用于在判断存在盗车行为后,获取存在盗车行为的驾驶人员对应的同行信息,所述同行信息包括同行次数以及同行人员信息;
图谱构建模块808,用于根据所述同行信息,构建关于所述存在盗车行为的驾驶人员的关系图谱,所述关系图谱包括同行次数以及同行人员信息,所述关系图谱用于展示同行人员与存在盗车行为的驾驶人员的同行关系。
可选的,如图10所示,所述装置还包括:
比对模块809,用于将所述同行人员信息与前科人员库进行比对,所述前科人员库包括盗车人员前科信息;
调整模块810,用于根据比对结果对所述关系图谱进行调整,得到具有盗车行为的嫌疑人员关系图谱,所述嫌疑人员关系图谱包括同行次数以及对应的盗车人员前科信息。
可选的,如图11所示,所述装置还包括:
第三获取模块811,用于在判断存在盗车行为后,持续对存在盗车行为的驾驶人员进行抓拍,获取对应的抓拍信息;
轨迹模块812,用于根据所述抓拍信息,形成针对所述存在盗车行为的驾驶人员的轨迹,所述轨迹用于分析所述存在盗车行为的驾驶人员出现过的地点。
可选的,如图12所示,所述第一获取模块801包括:
获取单元8011,用于获取跟踪图像中的非机动车运动信息以及人员运动信息,所述非机动车运动信息包括非机动车特征,所述人员运动信息包括驾驶人员特征;
匹配单元8012,用于根据所述非机动车运动信息及所述人员运动信息为非机动车特征匹配对应驾驶人员特征,形成非机动车驾驶特征。
需要说明的是,本发明实施例提供的非机动车盗车行为的检测装置可以应用于非机动车盗车行为的检测设备,例如:社区摄像头、交通摄像头、计算机、服务器等可以进行非机动车盗车行为的检测的设备。
本发明实施例提供的非机动车交通违法监管装置能够实现图1至图8的方法实施例中的各个实施方式,以及相应有益效果,为避免重复,这里不再赘述。
参见图13,图13是本发明实施例提供的一种电子设备的结构示意图,如图13所示,包括:存储器1302、处理器1301及存储在所述存储器上并可在所述处理器上运行的计算机程序,其中:
处理器1301用于调用存储器1302存储的计算机程序,执行如下步骤:
获取跟踪图像中的非机动车驾驶特征,所述非机动车驾驶特征包括非机动车特征以及与所述非机动车特征匹配的驾驶人员特征;
将所述非机动车驾驶特征输入到聚类引擎中,聚类得到基于所述非机动车驾驶特征的历史抓拍信息,所述历史抓拍信息包括对应的历史非机动车特征以及历史驾驶人员特征;
检测是否存在非机动车驾驶特征与对应历史抓拍信息不相同的情况;
根据所述检测结果,判断是否存在盗车行为。
可选的,处理器1301执行的所述将所述非机动车驾驶特征输入到聚类引擎中,聚类得到基于所述非机动车驾驶特征的历史抓拍信息,包括:
将驾驶人员特征输入到聚类引擎中,聚类得到基于所述驾驶人员特征的历史抓拍信息;
处理器1301执行的所述检测是否存在非机动车驾驶特征与对应历史抓拍信息不相同的情况,包括:
检测是否存在同一驾驶人员特征对应的非机动车特征与历史非机动车特征不相同的情况;
处理器1301执行的所述根据检测结果,判断是否存在盗车行为,包括:
若检测到存在同一驾驶人员特征对应的非机动车特征与历史非机动车特征不相同,则判断有驾驶人员存在盗车行为。
可选的,处理器1301执行的所述将所述非机动车驾驶特征输入到聚类引擎中,聚类得到基于所述非机动车驾驶特征的历史抓拍信息,包括:
将所述非机动车特征输入到聚类引擎中,聚类得到基于所述非机动车特征的历史抓拍信息;
处理器1301执行的所述检测是否存在非机动车驾驶特征与对应历史抓拍信息不相同的情况,包括:
检测是否存在同一非机动车对应的驾驶人员特征与历史驾驶人员特征不相同的情况;
处理器1301执行的所述根据检测结果,判断是否存在盗车行为,包括:
若检测到存在同一非机动车对应的驾驶人员特征与历史驾驶人员特征不相同,则判断存在盗车行为。
可选的,处理器1301还执行包括:
在判断存在盗车行为后,获取存在盗车行为的驾驶人员对应的同行信息,所述同行信息包括同行次数以及同行人员信息;
根据所述同行信息,构建关于所述存在盗车行为的驾驶人员的关系图谱,所述关系图谱包括同行次数以及同行人员信息,所述关系图谱用于展示同行人员与存在盗车行为的驾驶人员的同行关系。
可选的,处理器1301还执行包括:
将所述同行人员信息与前科人员库进行比对,所述前科人员库包括盗车人员前科信息;
根据比对结果对所述关系图谱进行调整,得到具有盗车行为的嫌疑人员关系图谱,所述嫌疑人员关系图谱包括同行次数以及对应的盗车人员前科信息。
可选的,处理器1301还执行包括:
在判断存在盗车行为后,持续对存在盗车行为的驾驶人员进行抓拍,获取对应的抓拍信息;
根据所述抓拍信息,形成针对所述存在盗车行为的驾驶人员的轨迹,所述轨迹用于分析所述存在盗车行为的驾驶人员出现过的地点。
可选的,处理器1301执行的所述获取跟踪图像中的非机动车驾驶特征包括:
获取跟踪图像中的非机动车运动信息以及人员运动信息,所述非机动车运动信息包括非机动车特征,所述人员运动信息包括驾驶人员特征;
根据所述非机动车运动信息及所述人员运动信息为非机动车特征匹配对应驾驶人员特征,形成非机动车驾驶特征。
需要说明的是,本发明实施例提供的电子设备可以应用于非机动车盗车行为的检测设备,例如:社区摄像头、交通摄像头、计算机、服务器等可以进行非机动车盗车行为的检测的设备。
本发明实施例提供的电子设备能够实现图1至图7的方法实施例中的各个实施方式,以及相应有益效果,为避免重复,这里不再赘述。
本发明实施例还提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,该计算机程序被处理器执行时实现本发明实施例提供的非机动车交通违法监管方法实施例的各个过程,且能达到相同的技术效果,为避免重复,这里不再赘述。
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储记忆体(Read-Only Memory,ROM)或随机存取存储器(Random AccessMemory,简称RAM)等。
以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
- 非机动车盗车行为的检测方法、装置及电子设备
- 威胁检测方法、装置、行为画像方法、装置及电子设备