一种智能跟随移动供电机器人系统
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及机器人技术领域,特别涉及一种智能跟随移动供电机器人系统。
背景技术
在智能跟随方面,市面上已经有高尔夫跟随捡球桶智能跟随行李箱等产品,在工业领域也有智能跟随物流机器人,机器人智能跟随技术逐渐应用在生活中的方方面面。跟随技术实现的重要手段就是UWB超宽带无线载波通信技术。
对于作业工人来讲,一般需要使用电动工具。现有的电动工具需要电源,因此,工人在作业的时候,就容易被电源的位置所困,影响到作业的有效开展。
发明内容
本发明的目的是提供一种智能跟随移动供电机器人系统,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
本发明解决其技术问题的解决方案是:提供一种智能跟随移动供电机器人系统,包括:UWB标签、麦克纳姆轮小车、交流电源、控制模块、第一UWB定位基站模块和第二UWB定位基站模块;
所述麦克纳姆轮小车设有甲板和动力系统,所述交流电源设置在麦克纳姆轮小车的甲板上,所述甲板上设有竖杆和横杆,所述竖杆的一端连接在甲板上,所述横杆的中部与所述竖杆的另一端连接,所述第一UWB定位基站模块安装在横杆的首部,所述第二UWB定位基站模块安装在横杆的尾部;
所述控制模块分别与动力系统、第一UWB定位基站模块和第二UWB定位基站模块连接,所述第一UWB定位基站模块和第二UWB定位基站模块分别与UWB标签连接;
所述第一UWB定位基站模块和第二UWB定位基站模块分别根据其与UWB标签之间的飞行时间差得到麦克纳姆轮小车与UWB标签之间的距离,所述控制模块根据所述距离控制所述动力系统使得麦克纳姆轮小车往UWB标签移动。
进一步,本智能跟随移动供电机器人系统还包括:脑电波采集发射装置,所述脑电波采集发射装置与控制模块通过蓝牙连接;
所述脑电波采集发射装置用于检测人体的疲劳脑电波,并发送对应的断电指令给控制模块,所述控制模块接收到所述断电指令后控制断开交流电源的对外供电。
进一步,所述交流电源包括:储蓄电池、逆变模块和电源输出接口,所述储蓄电池通过逆变模块与电源输出接口连接;
所述控制模块包括:第一蓝牙模块、Arduino控制模块、STM32单片机和继电器模块;所述储蓄电池与逆变模块连接,所述逆变模块通过继电器模块与电源输出接口连接;
所述STM32单片机分别与Arduino控制模块、继电器模块、第一UWB定位基站模块和第二UWB定位基站模块连接;
所述逆变模块用于将储蓄电池的直流电转成交流电并通过继电器模块在电源输出接口输出;所述Arduino控制模块与第一蓝牙模块连接;
所述第一蓝牙模块与脑电波采集发射装置连接,所述脑电波采集发射装置用于检测人体的疲劳脑电波,并发送对应的断电指令给第一蓝牙模块,所述第一蓝牙模块将所述断电指令传递给Arduino控制模块,所述Arduino控制模块将所述断电指令传递给STM32单片机;
所述STM32单片机控制继电器模块断开逆变模块与电源输出接口之间的电连接。
进一步,所述控制模块还包括过流保护模块,所述过流保护模块用于检测电源输出接口的输出电流;
当所述输出电流超过设定的阈值时,则控制继电器模块断开逆变模块与电源输出接口之间的电连接。
进一步,所述控制模块还包括语音模块,所述语音模块与STM32单片机连接。
进一步,所述控制模块还包括温度传感器模块,所述温度传感器模块与STM32单片机连接,所述温度传感器模块用于检测环境的实时温度,并将所述实时温度传递给STM32单片机。
进一步,所述控制模块还包括时钟模块,所述时钟模块与STM32单片机连接,所述时钟模块用于将时间信息传递给STM32单片机。
进一步,所述脑电波采集发射装置包括:TGAM脑波模块、电池组、第一耳夹、第二耳夹、脑电极和第二蓝牙模块,所述第二蓝牙模块与第一蓝牙模块无线连接;
所述TGAM脑波模块分别与第一耳夹、第二耳夹、脑电极和第二蓝牙模块连接,所述电池组为第一耳夹、第二耳夹、TGAM脑波模块、脑电极和第二蓝牙模块提供电能;
所述TGAM脑波模块用于将第一耳夹、第二耳夹和脑电极采集到的脑电波信号形成断电指令并传递给第二蓝牙模块,所述第二蓝牙模块将所述断电指令传递给第一蓝牙模块。
进一步,所述控制模块还包括:ESP8266WiFi模块,所述ESP8266WiFi模块通过串口与STM32单片机连接。
进一步,所述第一蓝牙模块的型号为HC05蓝牙模块,所述第二蓝牙模块的型号为JDY-33蓝牙模块。
本发明的有益效果是:通过设置UWB标签、麦克纳姆轮小车、交流电源、控制模块、第一UWB定位基站模块和第二UWB定位基站模块,以实现跟随供电,方便用户进行作业,提高作业效率。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单说明。显然,所描述的附图只是本发明的一部分实施例,而不是全部实施例,本领域的技术人员在不付出创造性劳动的前提下,还可以根据这些附图获得其他设计方案和附图。
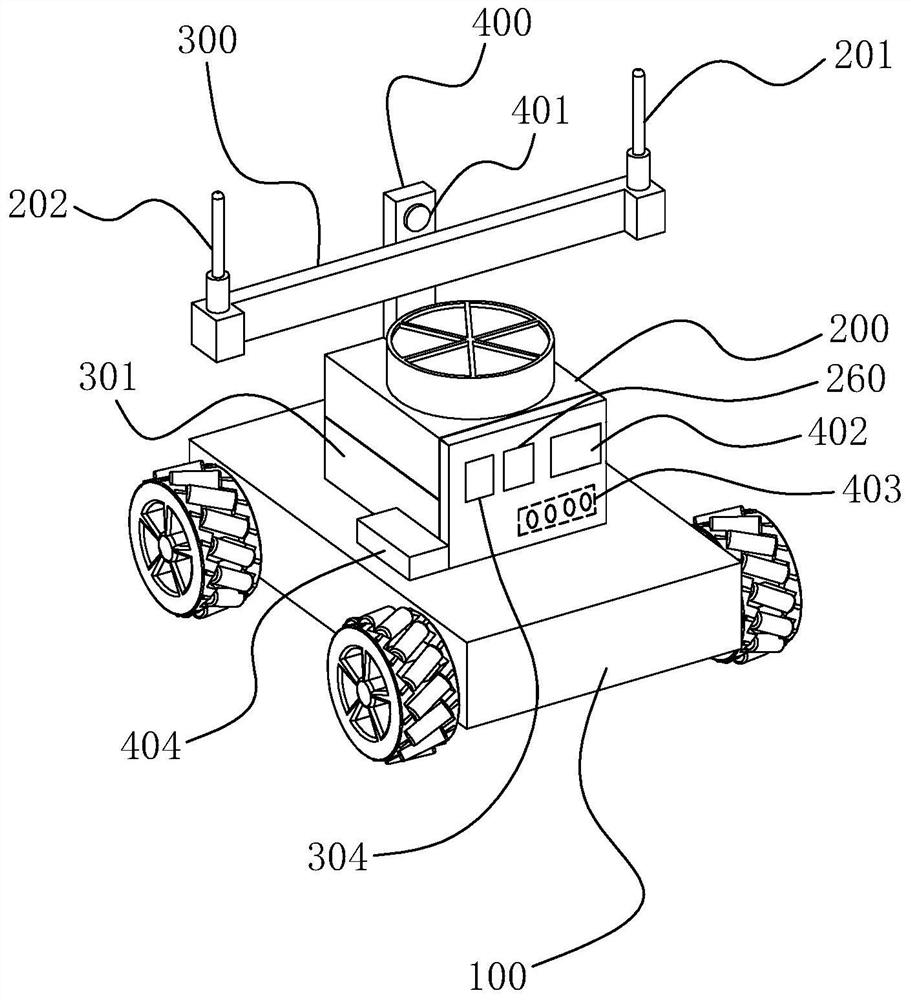
图1是智能跟随移动供电机器人系统的结构示意图;
图2是智能跟随移动供电机器人系统的模块连接结构示意图;
图3是脑电波采集发射装置的结构示意图。
具体实施方式
以下将结合实施例和附图对本发明的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本发明的目的、特征和效果。显然,所描述的实施例只是本发明的一部分实施例,而不是全部实施例,基于本发明的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。另外,文中所提到的所有联接/连接关系,并非单指构件直接相接,而是指可根据具体实施情况,通过添加或减少联接辅件,来组成更优的联接结构。本发明创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合。
实施例1,参考图1和图2,一种智能跟随移动供电机器人系统,包括:UWB标签、麦克纳姆轮小车100、交流电源200、控制模块、第一UWB定位基站模块201和第二UWB定位基站模块202;所述麦克纳姆轮小车100设有甲板和动力系统,所述交流电源200设置在麦克纳姆轮小车100的甲板上,所述甲板上设有竖杆400和横杆300,所述竖杆400的一端连接在甲板上,所述横杆300的中部与所述竖杆400的另一端连接,所述第一UWB定位基站模块201安装在横杆300的首部,所述第二UWB定位基站模块202安装在横杆300的尾部;
所述控制模块分别与动力系统、第一UWB定位基站模块201和第二UWB定位基站模块202连接,所述第一UWB定位基站模块201和第二UWB定位基站模块202分别与UWB标签连接,所述第一UWB定位基站模块201和第二UWB定位基站模块202分别根据其与UWB标签之间的飞行时间差得到麦克纳姆轮小车100与UWB标签之间的距离,所述控制模块根据所述距离控制所述动力系统使得麦克纳姆轮小车100往UWB标签移动。
当本系统工作的时候,用户通过佩戴UWB标签。通过第一UWB定位基站模块201和第二UWB定位基站模块202得到麦克纳姆轮小车100与UWB标签之间的距离。其中,麦克纳姆轮小车100与UWB标签之间的距离计算过程可以通过现有技术完成。具体原理为:第一UWB定位基站模块201和第二UWB定位基站模块202由于安装在同一个水平位置上,第一UWB定位基站模块201和第二UWB定位基站模块202利用TOF(飞行时间差的一半乘以光速)计算出UWB标签到第一UWB定位基站模块201和第二UWB定位基站模块202的距离,数据进行卡尔曼滤波之后,以该两组距离与两基站模块距离为三条边构造三角形,其中两基站模块之间的距离作为底边,然后利用余弦定理计算两底边夹角,由两夹角判断出麦克纳姆轮小车100的期望移动方向,根据两基站模块与标签之间的距离相关经验公式(根据轮子的周长以及麦克纳姆轮小车100的重量等实际参数经过调试所得)确定动力系统应该输出的动力,通过控制模块控制动力系统使得麦克纳姆轮小车100往UWB标签移动。
在一些优选的实施例中,本系统还包括:脑电波采集发射装置,所述脑电波采集发射装置与控制模块通过蓝牙连接,所述脑电波采集发射装置用于检测人体的疲劳脑电波,并发送对应的断电指令给控制模块,所述控制模块接收到所述断电指令后控制断开交流电源200的对外供电。
设置脑电波采集发射装置的目的是为了检测用户的疲劳,对于一些户外工作者来讲,当其疲劳时,其的注意力或者专注度就会下降。此时,如果依旧操作着电动工具,则会有危险。因此,在一些实施例中,脑电波采集发射装置通过采集用户的疲劳脑电波信息,当用户疲劳的时候,则发送断电指令给控制模块,控制模块则断开交流电源200对外供电。
对于交流电源200,指的是可以输出220V市电的交流电源200,其中,所述交流电源200包括:储蓄电池301、逆变模块303和电源输出接口304,所述储蓄电池301通过逆变模块303与电源输出接口304连接。储蓄电池301将电能存储起来,逆变模块303将储蓄电池301输出的直流电转换成交流电,并通过电源输出接口304输出。
对于控制模块,其的作用是对麦克纳姆轮小车100进行控制,还有与脑电波采集发射装置进行通讯。
所述控制模块包括:第一蓝牙模块230、Arduino控制模块220、STM32单片机210和继电器模块302;所述储蓄电池301与逆变模块303连接,所述逆变模块303通过继电器模块302与电源输出接口304连接;所述STM32单片机210分别与Arduino控制模块220、继电器模块302、第一UWB定位基站模块201和第二UWB定位基站模块202连接;所述逆变模块303用于将储蓄电池301的直流电转成交流电并通过继电器模块302在电源输出接口304输出;所述Arduino控制模块220与第一蓝牙模块230连接;所述第一蓝牙模块230与脑电波采集发射装置连接,所述脑电波采集发射装置用于检测人体的疲劳脑电波,并发送对应的断电指令给第一蓝牙模块230,所述第一蓝牙模块230将所述断电指令传递给Arduino控制模块220,所述Arduino控制模块220将所述断电指令传递给STM32单片机210;所述STM32单片机210控制继电器模块302断开逆变模块303与电源输出接口304之间的电连接。STM32单片机210通过输出PWM波来控制麦克纳姆轮小车100的动力系统,使得麦克纳姆轮小车100移动。
通过继电器模块302来对电源输出接口304的输电进行控制。当然,当电源输出接口304的输出电流过大的时候,也会影响到电力安全。故,在一些优选的实施例中,所述控制模块还包括过流保护模块305,所述过流保护模块305用于检测电源输出接口304的输出电流,当所述输出电流超过设定的阈值时,则控制继电器模块302断开逆变模块303与电源输出接口304之间的电连接。其中,过流保护模块305可以通过分压电路来设置阈值的电压,通过比较器来对该电压进行比较。将输出电流转变成反映电流的输出电压,通过输出电压与阈值的电压进行比较,从而对输出电流的情况进行判断。当所述输出电流超过设定的阈值时,则可以发送信号给过流保护模块305,通过过流保护模块305来控制继电器模块302以断开逆变模块303与电源输出接口304之间的电连接。
为了使得整个系统更加智能化,所述控制模块还包括语音模块240,所述语音模块240与STM32单片机210连接。通过语音模块240可以播放系统当前的状况。其中,语音模块240包括:语音处理芯片和扬声器401,其中,扬声器401安装在竖杆400的顶部,通过设置在竖杆400的顶部可以使得声音传播的范围更加广,方便播放语音。
所述控制模块还包括温度传感器模块260,所述温度传感器模块260与STM32单片机210连接,所述温度传感器模块260用于检测环境的实时温度,并将所述实时温度传递给STM32单片机210。所述控制模块还包括时钟模块250,所述时钟模块250与STM32单片机210连接,所述时钟模块250用于将时间信息传递给STM32单片机210。
设置温度传感器模块260和时钟模块250,可以提升整个系统的智能化水平。而且,还可以通过与语音模块240的配合,将环境是实时温度和当前的时间播报给用户收听。而且,还可以通过配合温度,以适当对电源输出接口304进行断电,以提醒用户注意环境温度。比如说,当温度达到某一个值时,语音模块240播放:“温度太高了,我觉得好热呀,断电”,此时继电器模块302断开逆变模块303与电源输出接口304之间的电连接。而且,当连续工作时间过于长时,即时钟模块250检测时间,并通过STM32单片机210计算时长,得到连续工作时长。当连续工作时长超过预先设定的时间长度阈值时,则语音模块240输出:“定时时间到,断电”。此时,继电器模块302断开逆变模块303与电源输出接口304之间的电连接。
参考图3,对于脑电波采集发射装置,其至少包括:TGAM脑波模块501、电池组502、第一耳夹504、第二耳夹505、脑电极506和第二蓝牙模块503,所述第二蓝牙模块503与第一蓝牙模块230无线连接,所述TGAM脑波模块501分别与第一耳夹504、第二耳夹505、脑电极506和第二蓝牙模块503连接,所述电池组502为第一耳夹504、第二耳夹505、TGAM脑波模块501、脑电极506和第二蓝牙模块503提供电能;所述TGAM脑波模块501用于将第一耳夹504、第二耳夹505和脑电极506采集到的脑电波信号形成断电指令并传递给第二蓝牙模块503,所述第二蓝牙模块503将所述断电指令传递给第一蓝牙模块230。此时,语音模块240输出声音:“sorry,你该休息了,断电”。
在工作的时候,用户通过佩戴脑电极506、第一耳夹504和第二耳夹505。佩戴脑电极506、第一耳夹504和第二耳夹505采集用户的脑电波,TGAM脑波模块501对采集到的脑电波进行分析得到疲劳脑电波信息,并形成断电指令。根据断电指令,STM32单片机210控制继电器模块302断开逆变模块303与电源输出接口304之间的电连接。
为了使得控制模块更加智能化,所述控制模块还包括:ESP8266WiFi模块270,所述ESP8266WiFi模块270通过串口与STM32单片机210连接。通过ESP8266WiFi模块270,用户可以利用ESP8266WiFi模块270与STM32单片机210之间建立通讯。从而从STM32单片机210中获取信息或者向STM32单片机210发送信息。可以通过手机与ESP8266WiFi模块270建立通讯,STM32单片机210与ESP8266WiFi模块270进行串口通信,进而获得手机指令。其中,在通讯调试的过程中,ESP8266 WiFi模块270首先需要通过USB转ESP8266调试板接到电脑,通过上位机调试对应的WiFi模块工作模式(主模式或者从模式)、WiFi名称以及密码、波特率、服务器端口号(5000)、以及IP地址(192.168.4.1),STM32单片机210通过ESP8266的串口通信接收字符,根据收到的对应字符发出对应的控制信号控制继电器模块302进行电源输出接口304的无线控制。
在一些优选的实施例中,所述第一蓝牙模块230的型号为HC05蓝牙模块,所述第二蓝牙模块503的型号为JDY-33蓝牙模块。
为了方便调试,在一些优选的实施例中,在控制模块中设置按键组403和液晶显示屏402,按键组403和液晶显示屏402均与STM32单片机210连接。其中,按键组403具有四个按键,通过按键组403和液晶显示屏402可以进行人机交互操作。具体的功能包括:通过按键组403可以实现时间的修改,具体修改过程可以通过液晶显示屏402中显示出来。具体为:四个按键从左到右依次是光标左移,光标右移,加一,减一;从而实现对时间的修改。当然,通过手机端也可以实现时间的修改,具体为:打开安装有“网络调试助手”APP的安卓手机,从网络中查询“ESP8266”(不需要输入密码,方便起见,提前上位机设置连接方式为open,无需密钥),手机自动连接到WiFi,打开串口调试助手,使用TCP client,配置IP地址为192.168.4.1,服务器端口号为5000,点击连接,提示已连接上,这时候用户发送“1”、“a”指令分别控制继电器模块302断开电源输出接口304的电输出。同时STM32单片机210控制语音模块240实时播放“指令收到,我断电”,使用起来非常智能化和人性化。
为了保证控制模块的供电稳定性,在一些优选的实施例中,本系统还包括后备直流电源404,所述后备直流电源404设置在甲板上,所述后备直流电源404用于给控制模块进行供电。
以上对本发明的较佳实施方式进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做出种种的等同变型或替换,这些等同的变型或替换均包含在本申请权利要求所限定的范围内。
- 一种智能跟随移动供电机器人系统
- 一种基于无线定位的机器人智能跟随系统及智能跟随方法