一种水下图像增强算法
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及一种水下图像增强算法,属于图像处理技术领域。
背景技术
水下成像技术已应用于各行各业,诸如港口设施的监测,水下目 标的检测,海洋生物的发现和水下机器人的控制等。得到清晰准确的 图像是开展相关水下任务的重要前置条件。由于光在水中的传输受水 中介质的散射和吸收的作用,使水下图片往往具有颜色失真、对比度 降低、细节信息不足等缺陷。其中水对光的吸收取决于光波的长度, 一般超过5米水深拍摄的图像便会呈现明显的蓝绿色调。水下成像的 特点严重影响了人们开展水下工作的进程。
人们已针对水下图像质量退化问题开展了诸多研究。其主要方法 可分为以下四类:一是基于额外硬件设备获取单一场景多幅图像的去 雾方法;二是基于空间域或频率域变换的水下图像增强算法;三是基 于反演水下成像模型的水下图像复原算法;四是最近比较热门的基于 深度学习技术的水下图像去雾算法。
其中第一类方法因水下环境的局限性,对单一场景获取多幅图像 的设备往往极为昂贵且操作复杂,一般的使用人员无法实操。第三类 方法基于反演水下成像模型的复原方法往往需要大量的环境先验知 识作为应用前提,并根据特定水域特点进行相关成像参数的预估,运 算极为复杂、耗时,且仅适用于单一水域场景,通用性不强。而最近 比较热门的基于深度学习技术的水下去雾方法往往需要大量的水下 相关相片样本构建完善的数据库才能发挥其水下去雾的功能,具有较 强的使用限制。因此我们提出一种水下图像增强算法和系统,只根据 获得的单幅水下图像的信息及我们发明的算法和系统即可对其进行 水下图像的质量增强,操作简便,效果明显。
发明内容
一种水下图像增强算法,包括:
S1、获取水下图像;检测图像像素点的红色通道、绿色通道、蓝 色通道的像素值,并计算各通道的像素均值;
使用(x,y)代表所在图像的像素点的位置,I
S2、提出五种颜色补偿方式:绿色补偿红色;蓝色补偿红色;蓝 色、绿色补偿红色;蓝色补偿绿色和红色;绿色补偿蓝色和红色;并 对图像的每个像素点进行颜色矫正;
所述S2步骤中颜色补偿(即上述“颜色矫正”)所使用的具体计 算公式1~5如下:
绿色通道对红色通道增强:
蓝色通道对红色通道增强:
蓝色、绿色通道对红色通道增强:
绿色通道对蓝色及红色通道增强:
蓝色通道对绿色及红色通道增强:
使用I
S3、对5种颜色通道补偿后的图像通过UCIQE和UIQM两种评 价方法分别进行定量评价;当α=1时,选取UCIQE值与UIQM值最 大的两幅图像作为拟选最优颜色通道补偿图像;
UCIQE的计算公式为UCIQE=c
UIQM的计算公式为UIQM=c
S4、对于所述S3步骤中获得的拟选最优颜色通道补偿图像,分 别采用UCIQE和UIQM对采用不同补偿系数α生成的图像进行定量 评价;
分别以n(n<1)的增强在(0,1]的范围内设定α的值,生成相应的2/n 幅图像,并设定m=(0:1:2/n]分别代表这2/n幅图像;
所述步骤S4中使用UCIQE(m)代表第m种α值的通道增强后的 图像UCIQE的取值,min(UCIQE)代表2/n幅图像UCIQE最低的值, max(UCIQE)代表2/n幅图像UCIQE最高的值;UIQM(m)代表第m 种α值的通道增强后的图像UIQM的取值,min(UIQM)代表2/n幅图 像UIQM最低的值,max(UIQM)代表2/n幅图像UIQM最高的值;
S5、使用公式6,取最大的比重和结果对应的α值作为所述S2 步骤计算公式1~5中的α值,选择此α值对应的颜色补偿方法生成的 图像作为最佳颜色矫正图像;
公式6中UCIQE(m)代表第m种α值的通道增强后的图像UCIQE 的取值,min(UCIQE)代表2/n幅图像UCIQE最低的值,max(UCIQE) 代表2/n幅图像UCIQE最高的值;UIQM(m)代表第m种α值的通道 增强后的图像UIQM的取值,min(UIQM)代表2/n幅图像UIQM最低 的值,max(UIQM)代表2/n幅图像UIQM最高的值;
S6、对最佳颜色矫正图像进行白平衡处理,采用Gray World白 平衡假设进行白平衡处理即得到改进白平衡强化图像;
S7、人工调节γ值生成改进白平衡强化图像的多幅欠曝光版本公 式:
S8、通过公式7~9计算三种权重值;
对比度权重值公式:
公式7中
饱和度权重值公式:
公式8中
最佳曝光度权重值公式:
公式9中
S9、通过公式10将三种权重值相乘,计算结果进行标准化处理;
相乘公式:
公式10中W
将W
S10、通过将Wk
多尺度图像融合算法公式:
优选的是,所述S1步骤中将被补偿通道像素值高于图像像素最 高强度95%的点取出,去除,无需处理。
优选的是,所述S7步骤中当γ>5后图像因对比度降低太多而发 暗,丢失太多细节信息而没有使用价值;因此γ取值1、2、3、4、5, 同时生成不同γ值对应的5幅图片。
优选的是,所述S8步骤中常数系数σ经大量实验后确认设置为 0.2效果最佳。
本发明展示的算法系统简单实用,能有效纠正水下图像色偏,提 升图像对比度,恢复细节信息,具备很好的鲁棒性。只根据获得的单 幅水下图像的信息及我们发明的算法和系统即可对其进行水下图像 的质量增强,操作简便,效果明显。
附图说明
为了清楚说明本发明技术方案,同时展示与其他现有算法的处理 效果进行对比的结果,下面对发明内容中所需要的附图做简单介绍。
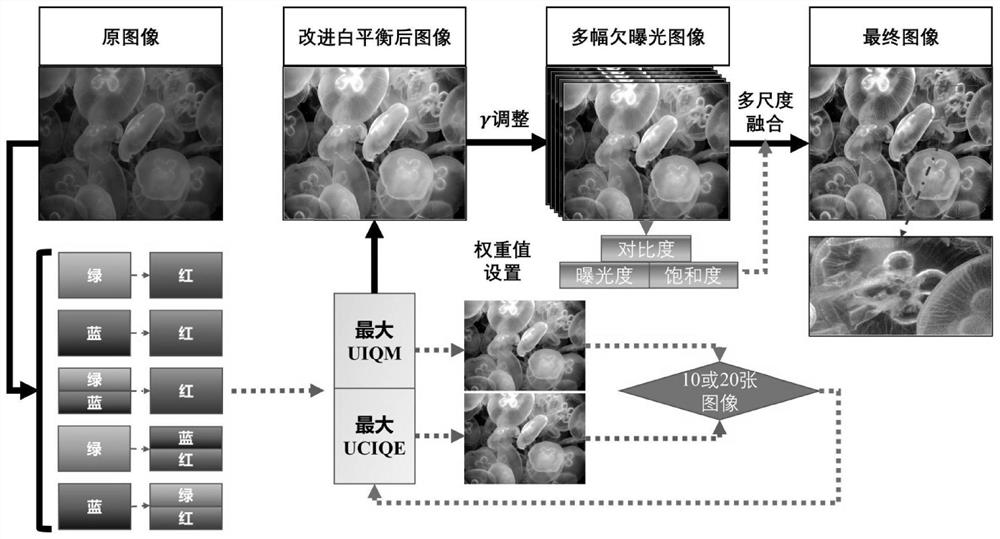
图1为本发明描述的一种水下图像增强算法流程图。
图2为本发明改进的白平衡和其他白平衡方式对比图。
图3为本发明算法与其他算法的水下图像处理增强效果对比图。
图4为本发明算法处理的低光照对比图。
图5为本发明算法处理的雾天、自然图像对比图。
图6为本发明算法采用SIFT图像匹配算法成功匹配对数显示对 比图。
具体实施方式
下面对本发明的具体实施方式进行详细说明。
为了更好的理解本发明的图像增强算法,首先对先对本发明中使 用的改进白平衡技术做详细介绍。
a、改进白平衡技术
流程如图1所示,采用的具体技术如下:
S1、获取水下图像的红色通道、绿色通道、蓝色通道的像素值, 并计算各通道的像素均值。
使用(x,y)代表所在图像的像素点的位置,I
其中为防止颜色补偿过多的情况发生,事先将被补偿通道像素值 高于其最高强度95%的点取出不做进一步补偿处理。
S2、基于红色通道在水中被吸收最多这一普遍观察特性,我们仅 关注绿色通道对红色通道增强;蓝色通道对红色通道增强;蓝色、绿 色通道共同对红色通道增强;绿色通道对红色、蓝色通道增强以及蓝 色通道对红色、绿色通道增强这五种颜色矫正方法。
使用这五种颜色补偿(即上述“颜色矫正”)方法进行补偿计算, 计算公式1~5如下:
绿色通道对红色通道增强:
蓝色通道对红色通道增强:
蓝色、绿色通道对红色通道增强:
绿色通道对蓝色及红色通道增强:
蓝色通道对绿色及红色通道增强:
上式中I
S3、对5种颜色通道补偿方式后的图像通过UCIQE和UIQM两 种评价方法分别进行定量评价,并选取UCIQE值与UIQM两值最大 的两幅图像作为拟选最优颜色通道补偿图像。
UCIQE是水下彩色图像质量评价,其计算公式为 UCIQE=c
UIQM是水下图像质量测量指标,其计算公式为 UIQM=c
S4、对于获得的拟选最优颜色通道补偿图像,分别以0.1的增强 在(0,1]的范围内设定α的值,生成相应的20幅图像,并设定m=(0:1:20] 代表这20幅图像。
使用UCIQE(m)代表第m种α值的通道增强后的图像UCIQE的 取值,min(UCIQE)代表20幅图像UCIQE最低的值,max(UCIQE)代 表20幅图像UCIQE最高的值;用UIQM(m)代表第m种α值的通道 增强后的图像UIQM的取值,min(UIQM)代表20幅图像UIQM最低 的值,max(UIQM)代表20幅图像UIQM最高的值;
S5、将20幅图像的UCIQE和UIQM值的两比重相加,取最大 的比重和结果对应的α值作为第2步骤计算公式1~5中的α值,此α 值对应的颜色补偿方法生成的图像即最佳颜色矫正图像。
所用相加公式:
公式6中UCIQE(m)代表第m种α值的通道增强后的图像UCIQE 的取值,min(UCIQE)代表20幅图像UCIQE最低的值,max(UCIQE)代 表20幅图像UCIQE最高的值;用UIQM(m)代表第m种α值的通道 增强后的图像UIQM的取值,min(UIQM)代表20幅图像UIQM最低 的值,max(UIQM)代表20幅图像UIQM最高的值;
某一图像的value值最大时,可以认为这幅增强图像的图像质量 最高,被选取为最佳颜色矫正图像;同时,其所对应的m值(即α值) 是最佳颜色矫正图像的增强系数。
S6、对最佳颜色矫正图像进行白平衡处理,采用Gray World白 平衡假设(参考文献:H.Zhang,B.Dong,and Z.Jiang,″Single Image Dehazing Using Improved GrayWorld Theory and Dark Channel Prior,″ in 10th International Symposium ofArtificial Intelligence supported by the Japanese Society for ArtificialIntelligence,JSAI-isAI 2018, November 12,2018-November 14,2018,Yokohama,Japan,2019,vol. 11717LNAI:Springer Science and Business Media DeutschlandGmbH, in Lecture Notes in Computer Science(including subseries Lecture Notesin Artificial Intelligence and Lecture Notes in Bioinformatics),pp.67-73,doi:10.1007/978-3-030-31605-1_5.[Online].Available:http://dx.doi.org/10.1007/978-3-030-31605-1_5)进行白平衡处理即得到通过定量评价改 进白平衡技术处理的水下图像。
获得改进白平衡技术处理的水下图像后,使用人工生成多幅欠曝 光融合技术处理,并采用基于拉普拉斯分层的经典多尺度融合方式对 我们改进白平衡处理后的图像进行增强。下面对采用的人工生成多幅 欠曝光融合技术做详细介绍。
b、人工生成多幅欠曝光融合技术
S1、引入γ值,人工调节伽马值生成白平衡后的图像的多幅欠曝 光版本公式:
由于γ>5的图像因对比度降低太多而发暗,丢失太多细节信息导 致没有使用价值。因此只采用γ=1、2、3、4、5的5幅图片。
S2、通过公式7~9分别计算“对比度”、“饱和度”及“最佳曝光度” 三种权重值,计算结果
对比度权重值公式:
等号左边的
饱和度权重值公式:
等号左边的
最佳曝光度权重值公式:
等号左边d的
S3、通过公式10将得到的对比度,饱和度和最佳曝光度权重值 进行相乘,并进行标准化处理。
相乘公式为:
其中等号左边W
S4、将得到的W
多尺度图像融合算法公式:
为验证本算法的有效性,更好的证明本发明的算法可以有效提高 所处理的图像的质量,如图2~6及表1、表2所示,进行了以下测试。
图2为本发明改进的白平衡和其他白平衡方式对比,其中图2(a) 为水下原图,原图存在模糊、色彩不均的问题;图2(b)为Gray Edge 白平衡处理效果图(参考文献:J.vande Weijer,T.Gevers,and A. Gijsenij,″Edge-based color constancy,″IEEETransactions on Image Processing,vol.16,no.9,pp.2207-2214,2007.);图2(c)为Shades of Gray白平衡处理效果图(参考文献:G.D.Finlayson and E.Trezzi, ″Shadesof gray and colour constancy,″in Final Program and Proceedings of the IS andT and SID-12th Color&Imaging Conference:Co1or Science and Engineering:Systems,Technologies,Applications, November 9,2004-November 12,2004,Scottsdale,AZ,United states, 2004,pp.37-41:Societyfor Imaging Science andTechnology.);图2(d) 为MAX RGB白平衡处理效果图(参考文献:D.Marini,A.Rizzi,andC. Carati,″Color constancy effects measurement of the Retinex theory,″Proceedings of SPIE-The International Society for Optical Engineering,vol.3648,pp.249-256,1998.);图2(e)为Gray World白平衡图像处理 图(参考文献:H.Zhang,B.Dong,and Z.Jiang,″Single Image Dehazing Usining Improved Gray WorldIheory and Dark Channel Prior,″in l0th International Symposium of ArtificialIntelligence supported by the Japanese Society for Artificial Intelligence,JSAI-isAI 2018,November 12,2018-November 14,2018,Yokohama,Japan,2019,vol.11717 LNAI:Springer Science and Business Media Deutschland GmbH,inLecture Notes in Computer Science(including subseries Lecture Notes inArtificial Intelligence and Lecture Notes in Bioinformatics),pp.67-73, doi:10.1007/978-3-030-31605-1_5.[Online].Available:http://dx.doi.org/10 .1007/978-3-030-31605-1_5);图2(f)为CosminAncuti颜色纠正技术处 理效果图(参考文献:C.Ancuti,C.O.Ancuti,T.Haber,and P.Bekaert, ″Enhancing underwater images andvideos by fusion,″in 2012IEEE Conference on Computer Vision and PatternRecognition,CVPR 2012, June 16,2012-June 21,2012,Providence,RI,United states,2012,pp. 81-88:IEEE Computer Society.);图2(g)为Codruta O.Ancuti白平衡技 术处理效果图(参考文献:C.O.Ancuti,C.Ancuti,C.De Vleeschouwer, and P.Bekaert,″ColorBalance and Fusion for Underwater Image Enhancement,″IEEE Trans ImageProcess,vol.27,no.1,pp.379-393, Jan 2018.);图2(h)为本发明的改进白平衡技术效果处理图。
表1用SSIM与PCQI技术评定图2中各颜色矫正方法的效果
同时表1为用SSIM与PCQI技术评定图2中各颜色矫正方法的 效果,评价指标计算公式如下:
其中x,y代表被对比的两幅图像(增强图和参考图),μ,σ,σ
PCQI(x,y)=P
其中x,y分别代表被对比的两幅图像(增强图和参考图),P
结合图2与表1,本发明中改进白平衡技术对于模糊不清、颜色 失真的原图有良好的矫正效果,与其他算法相比,处理的图像对比度 更高,图像质量更好。
图3(a)为水下原始图像,图3(b)为UDCP水下图像处理技术优化 图像(参考文献:P..L..J.Drews,E.R.Nascimento,S.S.C.Botelho,and M.F.M.Campos,″Underwater depthestimation and image restoration based on single images,″IEEE ComputerGraphics and Applications,vol. 36,no.2,pp.24-35,2016.),图3(c)为Cosmin Ancuti水下图像处理技 术优化图像(参考文献:C.Ancuti,C.O.Ancuti,T.Haber,and P.Bekaert,″Enhancing underwater images and videos by fusion,″in 2012IEEE Conference onComputer Vision and Pattern Reeognition,CVPR 2012, June 16,2012-June 21,2012,Providence,RI,United states,2012,pp. 81-88:IEEE Computer Society.),图3(d)为L
表2用UIQM,UCIQE与PCQI技术评定图3中各水下图像增 强算法效果
表2为用UIQM,UCIQE与PCQI技术评定图3中各水下图像增 强算法效果。
综合图3与表2,图3原图(a)的图像背景色偏绿,对比度差。经 本发明改善后显著改善色偏,对比度提高,且相较于其他算法有更好 的图像质量。
图4(a)为原始输入低光照图像,图4(b)为本发明优化后低光照图 像。图5(a)为原始输入雾天、自然图像,图5(b)为本发明优化后雾天、 自然图像。本发明的算法在改善雾天,低光照及自然图像的视觉质量 上也有显著效果。
图6(a)为水下原始图像采用SIFT图像匹配算法成功匹配对数显 示(参考文献:Z.Wang,A.C.Bovik,H.R.Sheikh,and E.P.Simoncelli, ″Image quality assessment:From error visibility to structural similarity,″ IEEE Transactions on ImageProcessing,vol.13,no.4,pp.600-612, 2004.),图6(b)为本发明优化后采用SIFT图像匹配算法成功匹配对数 显示。原始图像匹配数量分别为:7和690;经本发明算法优化后匹 配数量为:91和1109。可以看出本发明的算法增强后的图像可以被 检测出更多的关键点和更准确的匹配结果。
以上所述仅用于对本发明的技术方案进行详细介绍,帮助理解本 发明的技术手段及其核心设计思想,不应认为是对本发明做出的限制。 本技术领域的技术人员应当明白,凡在本发明的核心思想之内,所作 的任何修改、等同替换、改进等,均应包含于本发明的保护范围。
- 一种基于多算法融合的水下实时图像增强方法
- 一种水下图像增强算法