一种五足式智能行走机器人
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及腿足式行走机器人技术领域,特别是一种五足式智能行走机器人。
背景技术
随着科学技术的发展,移动机器人的研究与应用有了长足的进步,智能移动机器人带有多种传感器,能够将多种传感器得到的信息进行融合,有效的适应变化的环境,应用于各种场景。
移动机器人行走方式有轮式行走、履带式行走,腿式行走、复合式行走等,腿式行走相对于轮式、履带式行走方式能更好的适应各种地形。
目前腿式智能移动机器人有双足和多足之分,多足机器人尤以四足和六足机器人研究较多。
双足机器人和多足机器人在控制系统、平衡能力、承载能力、感知能力、能耗等方面仍有许多关键技术需要研究,应用场景受到一定限制。
随着社会的发展,许多场景需要机器人来完成一些特定的任务,比如一些缺少无障碍设施的场所,移动机器人可以辅助老人及行动不便者上下楼梯、运送货物等。
针对双足及四足机器人技术上所存在的高能耗、低承载等问题,设计一种低能耗、高承载、安全稳定的机器人,成为亟需解决的技术问题。
发明内容
本发明所要解决的技术问题是:针对现有技术不足,更好的挖掘机械结构的潜力,机器人采用五条腿行走,用伸缩式腿部结构代替现在流行的关节转动式腿部结构,简化控制系统,提高行走机器人的平衡能力和承载能力,降低能耗,提供一种安全、廉价的移动机器人,解决货物、人的移动及上下楼问题。
为解决上述技术问题,本发明所采用的技术方案是:一种五足智能行走机器人,包括支撑系统(1)、行走系统(2)、供电系统(3)、控制系统(4)、感知系统(5)、显示系统(6)。
所述支撑系统(1)包括承重板(11)、可伸缩腿足(12)。所述承重板(11)为一块金属或复合材料矩形板,水平放置于可伸缩腿足(12)上,通过导轨(21)与五条腿端部连接;所述可伸缩腿足(12)为电动推杆或液压推杆,上端通过导轨(21)与承重板(11)连接,下端支撑于地上,根据控制系统(4)的控制指令进行移动或伸缩。五条腿(121、122、123、124、125)上部支撑点形成一个水平面,确保支撑平衡稳定。
所述行走系统(2)包括导轨(21)、滑块(22)、齿轮(23)、齿条(24)、电机(25)、螺纹丝杆(26)、转轴(27)。所述导轨(21)安装于承重板(11)下部;所述滑块(22)与螺纹丝杆(26)、可伸缩腿足(12)连接,置于导轨(21)上,随可伸缩腿足在导轨上移动;所述齿轮(23)安装于中间腿足(123)上端,所述齿条(24)安装于承重板(11)下,工作时移动电机(251)带动齿轮(23)旋转,齿轮(23)带动齿条(24)和承重板(11)移动;所述电机(25)包括移动电机(251)、旋转电机(252)、小轮牵引电机(253),移动电机(251)与齿轮(23)相连,旋转电机(252)与转轴(27)相连,丝杆电机(253)与螺纹丝杆(26)相连,为螺纹丝杆(26)提供动力;所述螺纹丝杆(26),与丝杆电机(253)、滑块(22)、可伸缩腿足(12)相连,带动滑块(22)和可伸缩腿足(12)在导轨(21)上移动;所述转轴(27)安装于中间腿足(123)上部,与导轨(21)连接,在旋转电机(252)作用下带动机器人转向。
所述供电系统(3)包括动力电池(31)、开关(32),所述动力电池(31)安装在承重板(11)上,通过开关(32)控制,为支撑系统(1)、行走系统(2)、控制系统(4)、感知系统(5)及显示系统(6)提供能源。
所述控制系统(4)包括控制器(41)、操纵装置(42),所述控制器(41)为集成电路板,由软件控制,根据感知系统(5)传输数据,通过操纵装置(42)控制机器人移动。
所述感知系统(5)包括摄像装置(51)、测距装置(52)、压力传感器(53),所述摄像装置(51)安装于承重板(11)下,与显示屏(6)连接,实时将可伸缩腿足(12)的位置和状态显示在显示屏(6)上;方便使用者观察可伸缩腿足(12)的状态;所述测距装置(52)安装于承重板(11)前端,实时测量承重板(11)到地面及障碍物的距离,传输数据给控制系统(4),以控制可伸缩腿足(12)伸缩、移动以及承重板(11)的移动;所述压力传感器(53)安装于可伸缩腿足(12)上,感知机器人和承重板(11)上重物的重心位置,将数据传输给控制系统(4),以调整可伸缩腿足(12)的支撑位置及高度,确保机器人平衡。
所述显示系统(6)包括显示屏(6),所述显示屏(6)显示可伸缩腿足(12)的位置及状态图像、电量、机器人移动速度、其他器件的工作状态。
与现有技术相比,本发明所具有的优势为:更好的挖掘机械结构的潜力,机器人采用五条腿行走,行走时至少有3条腿支撑于地面,提高了承载能力和稳定性,移动方式分解为伸缩运动、平移运动和旋转运动,简化了控制系统,降低了能耗。
附图说明
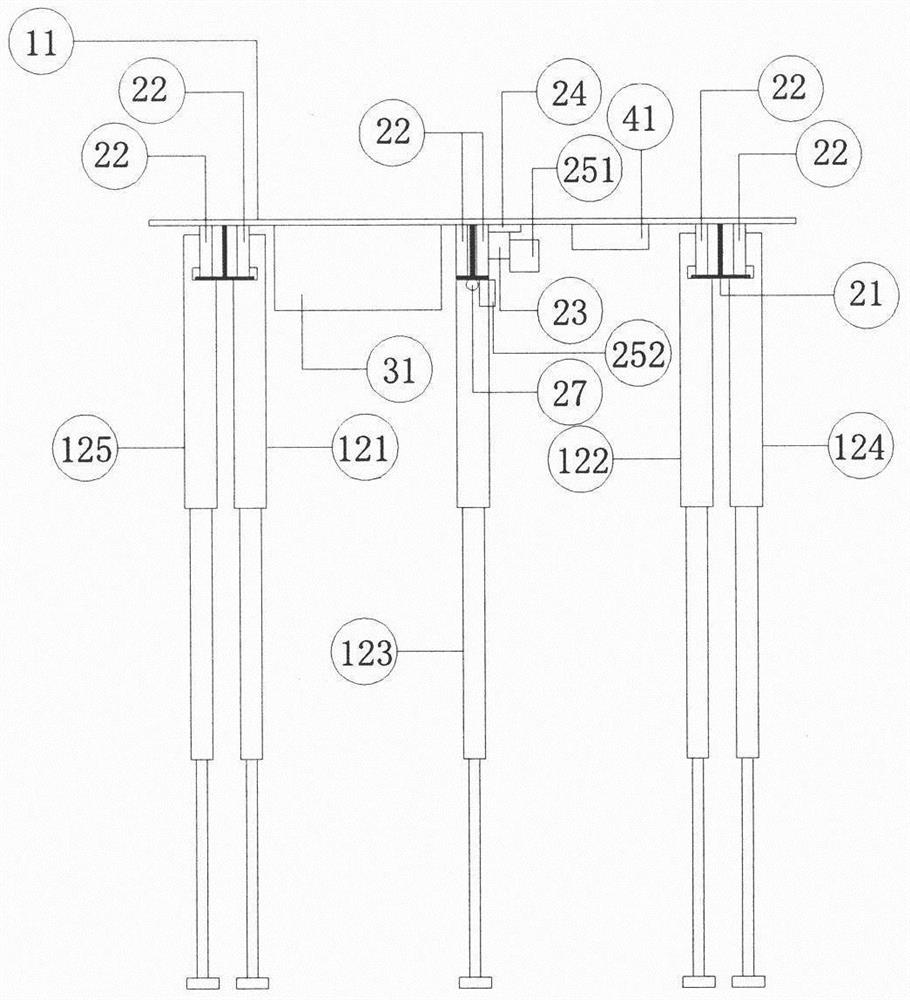
图1为本发明正视。
图2为图1平面图。
图3为图1侧视图。
图中1为支撑系统;11为承重板;12为可伸缩腿足;121为1号腿足、122为2号腿足、123为3号腿足、124为4号腿足、125为5号腿足;2为行走系统;21为导轨;22为滑块;23为齿轮;24为齿条;25为电机,251为移动电机、252为旋转电机、253为小轮牵引电机;26为螺纹丝杆;27为转轴;3为供电系统;31为动力电池;32为开关;4为控制系统;41为控制器;42为操纵装置;5为感知系统;51为摄像装置;52为测距装置;53为压力传感器;6为显示系统。
具体实施方式
以下结合附图对本发明的具体实施方式做出详细的描述。
如图1、图2所示,在平地上行走时,五条可伸缩腿足(12)支撑在地上,可伸缩腿足(121、122)位于后端,可伸缩腿足(123)位于中间,可伸缩腿足(124、125)位于前端,承重板(11)通过移动电机(251)带动齿轮(23)、齿条(24)向前移动,重心落在可伸缩腿足123、124和125支撑点组成的三角形内,可伸缩腿足(121和122)收缩,然后沿导轨(21)向前移动到承重板(11)前端,然后伸长支撑在地上;五足全部支撑好后,承重板(11)再前移,后端可伸缩腿足(123)收缩前移、支撑,承重板(11)再前移,后端可伸缩腿足(124和125)收缩、前移、支撑,循环往复,实现机器人向前移动;当需要转向时,可伸缩腿足(123)移动到承重板(11)中心附近,将机器人和重物的重心调整到可伸缩腿足(123)上,保持平衡,其他可伸缩腿足(121、122、124、125)收缩离地,然后在控制系统(4)控制下,旋转电机(252)带动承载板(11)旋转,完成机器人转向。
上台阶时,可伸缩腿足(12)支撑于台阶前,然后五条腿足(12)同时顶升,顶升高度根据台阶高度确定,顶升完成后,承重板(11)前移,前移过程中通过控制系统(4)和感知系统(5)确保承重板(11)水平,同时重心落在支撑点组成的平面内,后端腿足(12)收缩抬起,移动到承重板(11)前端,登上台阶,支撑稳定后,可伸缩腿足(12)再同时顶升,然后进行入下一个循环,顶升、承重板(11)向前移动、后端腿足(12)前移,循环往复,实现机器人上楼梯。
下台阶时,可伸缩腿足(12)支撑于台阶上,承重板(11)前移,前移过程中通过控制系统(4)和感知系统(5)确保承重板(11)水平,同时重心落在支撑点组成的平面内,后端腿足(12)收缩抬起,移动到承重板(11)前端,然后伸长,登上台阶,支撑稳定后,可伸缩腿足(12)再同时收缩下降,然后进行入下一个循环,承重板(11)向前移动、后端腿足(12)前移,腿足(12)收缩下降,循环往复,实现机器人下楼梯。
机器人跨越沟坎采用类似上下楼梯移动方式,通过感知系统测量地面高差,然后调整可伸缩腿足长度,实现平稳行走。
以上所述仅为本发明的较佳实例,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种五足式智能行走机器人
- 一种智能足式行走煤仓清理机器人