一种水平井着陆的分析图版方法
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及石油、天然气等上游勘探开发钻井技术领域,具体来说涉及一种水平井 着陆的分析图版方法。
背景技术
水平井井眼轨迹控制包括着陆段和水平段两个关键井段。着陆段是水平段作业的基 础,良好的着陆作业可降低因钻穿储层而填井侧钻、水平段起始阶段大幅调整井眼轨迹等钻井风险。区块作业者通常采用地质导向钻井技术支持着陆作业以提高其成功率。
水平井着陆作业本质上是指将钻井轨迹以正确的深度和正确的井斜角、方位角摆放 到目的层中。为此,着陆作业需要将地层位置预测和钻井轨迹控制紧密结合。因为预测手段的局限性,地层位置预测的垂深误差从几米到十几米不等,相应的轨迹调整需要同 预测结果保持动态同步。通常作业过程中需要多专业的随钻团队(包括地质导向、随钻 测井、定向井、油藏、地球物理以及地质等)跟井以下达作业指令。因此存在因人员经 验差别影响预测精度导致着陆轨迹形态差而影响水平段作业等问题。
该研究提出了采用分析图版方法对着陆作业过程进行分析,利用算法流程实现着陆 作业过程的自动分析预测,消除因人员经验差别造成的计算误差;便于分析人员直观的获取着陆作业的关键信息,从而提高预测精度、优化着陆作业、提高分析效率,实现对 着陆作业的过程控制。
发明内容
本发明克服了现有技术中的不足,水平井着陆作业过程受人员经验影响预测误差大, 决策分析效率低下,提出了一种水平井着陆的分析图版方法,该方法将地质预测和工程 实施有机结合并以直观的图像形式展示,方便不同专业背景的作业人员快速获取着陆作 业关键信息,实现对着陆作业的过程控制,提高决策分析效率。
本发明是通过以下技术方案实现的:
一种水平井着陆的分析图版方法,按照下述步骤进行:
步骤1,进行测井曲线对比,将正钻井测井曲线和邻井测井曲线进行形态特征对比分 析,实现正钻井曲线相对于邻井曲线的地层位置校正;
步骤2,进行标志层划分,划分正钻井测井曲线和邻井测井曲线的标志层组;
步骤3,进行标志层对比匹配,将正钻井和邻井的标志层组进行配对;
步骤4,进行目的层倾角角度计算;
步骤5,进行着陆窗口计算,获取着陆窗口上、下边界垂深;
步骤6,进行目的层垂深预测;
步骤7,将步骤5和步骤6得到的结果通过分析图版进行展示,技术人员通过直观的图形分析获取着陆作业工况并做出决策。
在步骤1中,地层位置校正是指以正钻井曲线为模板,在邻井曲线上寻找测井响应特征类似的地层;
在步骤1中,地层对比采用皮尔森相关系数,公式如下:
公式(1)中x
在步骤2中,标志层是指测井响应特征明显、区块内沉积发育相对稳定的地层;基于测井响应特征进行识别划分;
在步骤2中,标志层划分采用曲线活度计算方法,计算公式如下:
公式(2)中,E(d)为曲线活度值,n为活度分析的窗口,x(i)为序列样本,
在步骤3中,标志层配对是指将测井响应特征类似的地层关联为同一地层;
在步骤4中,根据标志层配对结果,假设有配对的标志层A、A`,可根据正钻井和 邻井轨迹参数获取标志层对应垂深为TVD_A、TVD_A`,斜深为MD_A、MD_A`,则地层 视倾角Dip计算公式如下:
在步骤5中,着陆窗口定义如附图2,实线曲线为设计钻井轨迹,K为轨迹造斜点, A为设计着陆点,B为设计完钻点,假设当前钻头位置为M,轨迹能够钻达的最浅和最 深垂深分别为着陆窗口的上边界(着陆点S)和下边界(着陆点D);
着陆窗口上边界垂深的计算公式如下:
公式(4)中TVD_S是上边界S垂深,TVD_M是M垂深,Dip是地层倾角,BR是 增斜率。增斜率通常综合工具造斜率和轨迹最大曲率限制进行设定。着陆窗口下边界垂 深的计算公式如下:
公式(5)(6)中TVD_D是下边界D垂深,VSEC_A是A位移,VSEC_S是S位移, VSEC_M是M位移,θ
在步骤6中,目的层垂深预测是根据步骤3得到的标志层配对结果,假设邻井标志层到目的层的层间距不变,以此来预测正钻井目的层垂深位置;
在步骤7中,如附图3,分析图版的绘制方法是将目的层垂深范围采用箱体图的表示 方法,着陆窗口范围采用了虚线的表示方法。
本发明的优点和有益效果为:本发明通过系列算法实现水平井着陆作业的自动分析 预测,降低因人员经验差别导致的计算误差;本发明采用的多邻井标志层对比预测正钻井目的层位置,提高目的层位置预测精度;本发明提出了着陆窗口计算方法,通过计算 上、下边界垂深对钻井轨迹控制进行定量计算;本发明提出了水平井着陆作业的分析图 版方法,将地质预测分析和工程作业实施有机结合,方便不同专业背景的作业人员快速 获取着陆作业关键信息,实现对着陆作业的过程控制,提高决策分析效率。
附图说明
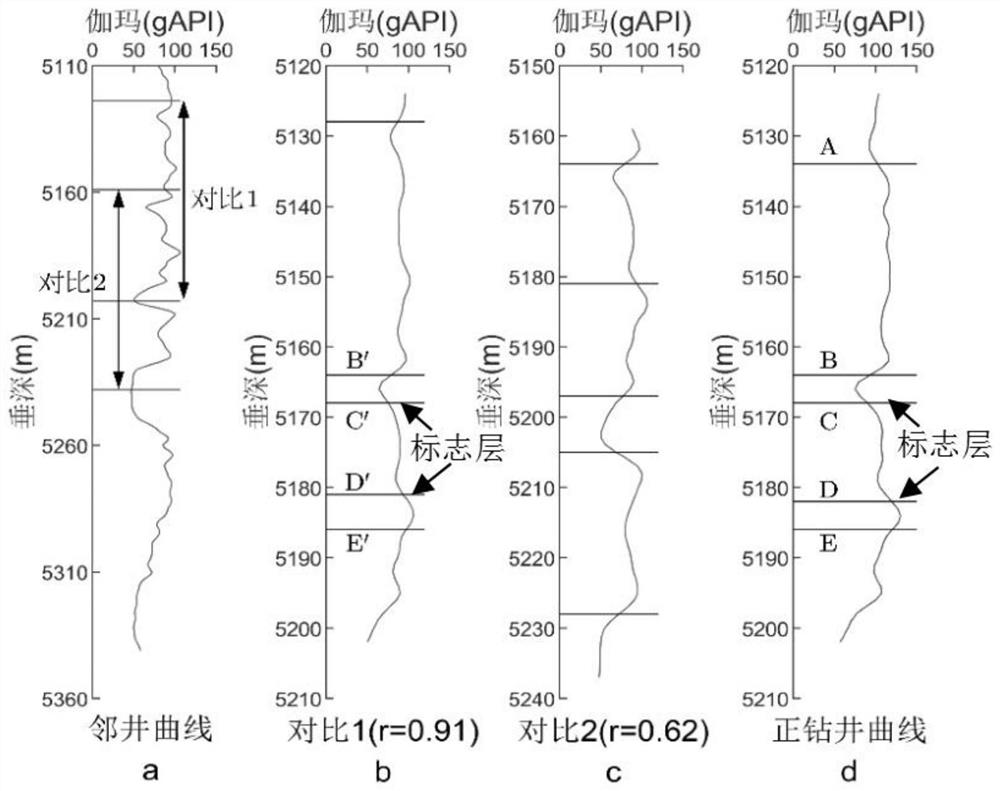
图1为标志层对比划分示意图。
图2为着陆窗口示意图。
图3为分析图版示意图。
图4为本发明的流程图。
对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,可以根据以上附图 获得其他的相关附图。
具体实施方式
下面结合具体实施例进一步说明本发明的技术方案。
实施例
一种水平井着陆的分析图版方法,按照下述步骤进行:
a、测井曲线对比
将正钻井随钻测井曲线和邻井测井曲线进行形态特征对比分析,实现正钻井曲线相 对邻井曲线的地层位置校正。测井曲线不限定为某一特定测井项目,本案例采用了伽玛测井曲线进行对比。图1a为邻井曲线,图1d为正钻井曲线,以正钻井测井曲线作为样 本,遍历邻井的不同深度位置进行相似性搜索对比,计算两条曲线的皮尔森相关系数(公 式1),x
得到两种可能的对比结论,放大纵向比例后如图1b和1c所示。计算1b和1c的相 关系数值分别为0.91和0.62,说明对比1结果的相关性更高。
b、标志层组划分
标志层是指测井响应特征明显、区块内沉积发育相对稳定的地层;通常由分析人员 基于测井响应特征进行识别划分,用以识别井与井之间地层构造、沉积分布的研究。自动划分正钻井曲线和邻井曲线标志层组,采用了曲线活度计算方法,计算公式如下:
其中,E(d)为曲线活度值,n为活度分析的窗口,x(i)为序列样本,
c、标志层对比匹配
建立两组标志层序列的皮尔森矩阵,实现两套标志层序列的自动配对。由于两套标 志层组序列之间存在多种配对可能性的情况,如表1所示矩阵网格代表了不同序列标志层之间的皮尔森系数值。通过比较标志层对比的不同组合情况下的累加皮尔森系数值获取最佳标志层配对方案,如表1展示了BB`-CC`-EE`的最佳方案(对应测井曲线图为1b 和1d)。
表1 用于标志层自动对比的皮尔森矩阵
Table 1 Person Matrix used for Automatic Marker Correlation
d、目的层倾角计算
计算地层倾角。假设有匹配的标志层A、A`,其对应垂深为TVD_A、TVD_A`,斜 深为MD_A、MD_A`,则视倾角Dip计算公式如下:
e、着陆窗口计算
着陆窗口上边界垂深的计算公式如下:
公式(2)中TVD_S是S垂深,TVD_M是M垂深,Dip是地层倾角,BR是增斜率。 增斜率通常综合工具造斜率和轨迹最大曲率限制进行设定,其中轨迹最大曲率限制是从 钻井设计中查询得到,例如水平段轨迹曲率要求<3deg·30m
着陆窗口下边界垂深的计算公式如下:
公式(3)(4)中VSEC_A是A位移,VSEC_S是S位移,VSEC_M是M位移,θ
f、目的层垂深预测
自动预测目的层垂深范围。利用步骤c得到的标志层对比匹配结果,根据邻井标志层层间距预测正钻井目的层垂深,即假设邻井标志层到目的层的层间距不变。因为不同 邻井、不同标志层的预测值存在变化,统计后可得到目的层的垂深分布范围。
g、绘制分析图板
如附图3所示,图板的横轴为轨迹水平位移,纵轴为垂深。首先,将目的层预测结果用箱型图的方法沿横轴标注,其中箱型图红线为统计结果的中位数值;其次,将着陆 窗口预测结果采用点线图的方法沿横轴标注,上边界为红色,下边界为蓝色。图中黑色 粗实线是实际钻井轨迹,蓝色细实线为设计钻井轨迹。分析结论如下:
(1)着陆作业过程中目的层预测的误差数值范围达到3~6米,但箱形统计图的中位 数线紧贴实际地层深度线,准确指示了目的层深度,说明通过多邻井标志层对比得到的目的层预测结果较准确;
(2)导向团队在着陆决策过程中,其着陆窗口选择为箱形数据的顶部,即基于个别井的对比结果进行决策。在水平位移270m处决定提前增斜,在280m处目的层垂深超出 着陆窗口上边界,导致第一次着陆失败;随后不得不降井斜进行第二次着陆下探目的层, 最终浪费了近65m水平段位移距。台阶状的轨迹形态为后续水平段钻完井作业留下隐患;
(3)通过分析图版可以发现上覆地层段着陆窗口远大于目的层预测范围,不建议过 早介入导向干预,然而过晚介入则丧失调整的最佳时机;
(4)利用分析图版可以说明当前接手方案是激进的,容易导致着陆失败。区块作业者为了降低作业成本,通常会要求导向技术服务团队晚介入。案例中,导向团队根据作 业方要求,在井斜80deg的时候接手该井。在位移260m(井斜80deg)处该井的目的层 预测范围已贴近着陆窗口下边界,接手后轨迹调整空间小。作为未来区块内待钻井的参 考,可对该接手方案作如下优化:提前导向接手点到位移220~240m(井斜72~76deg) 处,即箱型统计图位于着陆窗口中部位置时接手。
以上对本发明做了示例性的描述,应该说明的是,在不脱离本发明的核心的情况下, 任何简单的变形、修改或者其他本领域技术人员能够不花费创造性劳动的等同替换均落 入本发明的保护范围。
- 一种水平井着陆的分析图版方法
- 一种水平井着陆段地质导向方法