借助于雷达或者通过使用电磁询问辐射来确定对象的取向
文献发布时间:2023-06-19 12:07:15
技术领域
本发明涉及一种用于根据对象对电磁询问辐射的应答来识别和监测感测区域中的该对象。
背景技术
为了使得车辆能够至少部分自动化地在道路交通中运动,需要感测车辆的环境,并且如果面临与车辆的环境中的对象发生碰撞的危险,需要采取对策。为了安全地自动化地驾驶,还需要创建环境表示和定位。
借助于雷达对对象进行感测是与光照度无关的,并且例如即使在夜间在更大的距离上也是可能的,而迎面而来的车辆不被远光灯眩目。另外,由雷达数据直接得知对象的距离和速度。这些信息对于判断是否可能发生与对象的碰撞而言是重要的。然而,从雷达信号中不能直接识别出对象的类型。目前,通过计算数字信号处理中的属性来解决该识别。
US 8,682,821 B2公开了借助于机器学习以如下方式对雷达信号进行分类:所述雷达信号是否由确定的对象的运动或者非人类的动物的运动所导致的。能够利用该认识,以在监测区域的人类入侵者时避免错误警报,或者以在至少部分自动化驾驶时选择用于避免碰撞的正确的行动。
发明内容
在本发明的范畴中,已提出一种用于从至少一个测量信号中确定对象的空间取向的方法,该测量信号包含对象对电磁询问辐射的应答。尤其,该应答能够包含询问辐射的反射。
在这种方法中,从测量信号中求取对象上的不同地点对测量信号所做贡献的空间分布的至少二维的表示。借助分类器和/或借助回归器从该表示中求取对象的空间取向。
在此,测量信号能够已借助一个或者多个探测器感测到。例如,该测量信号可以是由多个探测器提供的原始数据所聚合的总测量信号。另外,在形成表示之前,测量信号能够已遍历信号处理的一个或者多个阶段。
例如,分类器能够将表现为角度的、0°至360°之间的空间取向划分为离散的区间,并且针对这些贡献的空间分布的每个输入的表示求取置信度,借助所述置信度能够将表示分别配属给取向的可能的区间中的每个区间。回归器能够在角度方面给出最有可能的空间取向,而在此不必受离散的区间约束。
例如,电磁询问辐射能够是雷达辐射。市场上可买到的用于监测空间区域的雷达传感器包含用于雷达辐射的一个或者多个发送器以及通常一个由多个接收天线构成的阵列,在不机械地移动该阵列的情况下,借助该阵列能够确定反射的雷达辐射所入射的方向(“波达方向,direction of arrival”,DOA)。雷达传感器一般不输出由接收天线提供的原始数据,而是从这些原始数据中提取反射。针对每个反射,通常分析评价该反射的至少一个角度位置、该反射的至少一个强度以及与该反射的地点的至少一个距离。
现在已认识到,将原始数据合并成反射是一种强烈的简化,在该强烈的简化时尤其强烈地抽象所探测的对象的空间延伸尺度。所述对象变成在以被感测的反射强度发出应答的点状的地点上的一个或者多个离散的源。然而,在现实中,扩展的电磁波前冲击扩展的对象。根据惠更斯原理,对象的表面上的每个无穷小的地点都是各向同性的元波的出发点,并且对象对电磁询问辐射的应答通过所有这些元波的叠置形成。
因此,对象上的不同地点对该测量信号作出的贡献的、根据该方法求取的空间分布,最终是所测量的对象应答到该应答的物理原点的还原。
当对象相对于测量组件的空间取向变化时,该分布也变化。因此,询问辐射仅能够不受阻碍地到达对象的表面上的与发送器位于一个视线中的那些地点。另外,对象的空间取向也确定所述询问辐射在每个地点上入射到该对象上的入射角度,并因此确定在不同地点上形成的元波之间的相位关系。
因此,能够通过分类和/或回归从贡献的所述分布的表示中求取对象的空间取向。
例如,该表示能够是三维的点云,这些三维的点云给三维空间中的地点分别配属从所述地点出发的、对应答做出的物理贡献。但是,例如,该表示也能够是二维的图像,通过将该点云投影到平面上或者通过其他配属规则明确地从该点云中得出该二维的图像。对于通过分类和/或回归从该表示中以期望的方式确定对象的空间取向而言,该表示正确地再现例如对象的轮廓不是关键的。重要的仅是,对象的两个不同的空间取向也在不同的表示中表现出来。
另外已认识到,以所说明的方式获取的、用于求取对象的空间取向的可能性基于借助电磁询问辐射的观察改善了对运动对象的轨迹的预测。在对象、例如车辆非常多的情况下,将即将面临的可能的运动方向与对象的空间取向相关联。例如,车辆能够沿着通过其纵轴线预给定的行驶方向继续滚动或者从该纵轴线出发通过转向操作拐弯。这种拐弯的最小曲率半径由车辆的结构、例如该车辆的轴距预给定。然而,例如,车辆不能够由于本身的驱动而恰好垂直于该车辆的纵轴线运动。
例如,如果借助雷达辐射监测位于待控制的或者待监测的本车辆(自身车辆)前方的感测区域,则因此能够根据在感测区域中探测的其它车辆的空间取向至少限界,该车辆即将可能沿哪个方向运动。对于判断其它车辆是否可能位于与自身车辆的碰撞路线上而言,这种信息是重要的。
因此,根据上述内容,在一种特别有利的构型中,将雷达辐射选择为电磁询问辐射。例如,原则上也能够使用在激光雷达方法(“激光探测与测量,light detection andranging”)的范畴中扫描感测区域的光。然而,与借助雷达辐射的测量相比,对测量信号的这种扫描式接收使回算出空间分布变得更难。
如前所述,有利地,测量信号包含关于电磁询问辐射的反射的数据组,并且这些数据组中的每个数据组都包含:
-反射的至少一个角度位置(例如方位角和/或仰角),
-反射的至少一个强度以及
-与反射的地点的至少一个距离。
如果为此使用测量信号的、相对于原始数据经历了较小程度的抽象和简化的处理阶段,则对贡献的空间分布的求取能够变得更精确。尤其,例如也可能的是,直接从由一个或者多个探测器提供的原始数据中求取空间分布的表示。
在一种特别有利的构型中,根据关于反射的数据组求取用于将贡献的空间分布转换为测量信号的物理模型。如前所述,例如,该模型能够包含一种规则,从不同地点出发的贡献按照该规则叠加成合成的波前,该波前携带对象的应答。附加地,例如,该模型也能够包含一种规则,到达一个或者多个探测器的波前按照该规则处理成测量信号。该模型越详细,则能够更精确地从该测量信号中推断出贡献的空间分布。
在另一特别有利的构型中,针对每个反射建立sinc函数,该sinc函数的峰值高度由反射的强度确定,并且该sinc函数的位置由反射的角度位置以及与反射的地点的距离确定。建立的所有sinc函数的总和用于求取该表示。在这背后存在这样的认识:特定地由雷达传感器提供的输出信号在内部处理阶段中包含sinc函数,所述sinc函数在后续的处理阶段中压缩成所提到的关于反射的信息。与sinc函数描述元波在波前在缝隙处衍射时的叠加一样,所述sinc函数也适用于描述对象的多个地点对确定的反射做出的贡献的叠加。
在此,尤其有利地,能够根据已提供测量信号的测量装置的物理测量精度来确定sinc函数的3dB宽度。因此,例如,尤其能够使确定不同的反射分别所用的、不同的测量精度相互加权。
在另一特别有利的构型中,人工神经网络、KNN和/或辅助向量机、即SVM选择为分类器和/或回归器。KNN和SVM属于能借助机器学习来训练的分类器或回归器。这意味着,能够利用贡献的空间分布的有限数量的学习表示和对象的配属的空间取向来使该分类器或回归器针对无限多的未知状况做准备。不能事先结论性地给出贡献的空间分布的整体上可能的表示的目录,因为不能概观可能的对象(例如车辆类型)的多样性
在另一特别有利的构型中,从对对象的物理观察中对对象的类型进行预分类。然后,根据该类型选择用于确定空间取向的分类器或回归器。因此,例如,载重车具有与乘用车完全不同的形状,并且与此相应地,这些车辆上的地点分别在借助询问辐射进行询问时从相同角度对测量信号做出的贡献的空间分布也有所区别。
如前所述,运动对象的所求取的空间取向尤其能够用于预测运动的未来进展。例如,当相同的电磁询问辐射(例如雷达辐射)也用于求取运动对象的速度时,这一点尤其适用。该速度使应答的频率相对于射入的询问辐射的频率移动了多普勒频率偏移,即该速度能够通过分析评价该应答的频率来测量。然而,如此求取的速度是标量。这意味着,该速度仅指出对象多快速地接近测量装置,或对象多快速地远离测量装置。现在,对象相对于测量装置的多个不同的运动能够以相同的标量速度兼容。通过借助先前所说明的方法来测量对象的空间取向,能够至少部分地解决关于运动对象的未来轨迹的多义性。
因此,本发明还涉及一种用于从至少一个测量信号中结合对象的标量速度v预测至少一个对象的轨迹的方法,所述测量信号包含对象对电磁询问辐射的应答。
在这种方法中,从测量信号中求取对象的位置。借助前面所说明的方法求取对象的空间取向。从对象的位置出发,在考虑标量速度v的状况下根据对象的空间取向推导对象的轨迹。
在此,“根据”例如在车辆作为对象的情况下可以意味着,通过车辆的能从车辆的空间取向中得知的纵轴线以及通过远离该轴线的可能的转向机动动作确定车辆的可能的未来行驶方向。但是,视用于所述推导的时间范围而定,例如,考虑车辆的当前纵轴线也可以是足够的。
如前所述,尤其有利地,能够从电磁询问辐射的多普勒频率偏移中求取标量速度v。
在另一种特别有利的构型中,将对象的预测的轨迹与待监测的和/或待控制的车辆的当前行驶轨迹和/或规划轨迹进行比较。通过这种方式尤其能够识别,是否存在所观察的对象的轨迹与本车辆的当前行驶轨迹或规划轨迹相切的风险。这种相切表明碰撞风险。
在另一种特别有利的构型中,应答于对象的预测的轨迹与车辆的当前行驶轨迹或规划轨迹相切,操控车辆的对于车辆的驾驶员而言能感知的物理警告装置。替代于此地或者也与此结合地,这样操控车辆的转向系统、驱动系统和/或制动系统,使得车辆的然后的新轨迹不再与对象的预测的轨迹相切。
尤其当雷达辐射用作电磁询问辐射时,与对于人类驾驶员根据其在近光灯的作用范围内的视觉观察所能实现的情况相比,例如在夜间能够更早地识别碰撞危险并且通过所提到的干预来减小该碰撞危险。
如上所述,在前面所说明的方法中,尤其能够使用能借助于机器学习能训练的分类器和/或回归器。因此,本发明还涉及一种用于训练分类器和/或回归器用于应用在上述方法中的方法。
在该方法中,提供学习数据组的学习集合。这些学习数据组分别包含作为学习输入的、对象上的不同地点对测量信号的贡献的空间分布的至少二维的表示,所述测量信号包含对象对电磁询问辐射的应答。另外,所述学习数据组包含作为学习输出的、分别在测量时呈现的空间取向。
通过参数确定分类器的和/或回归器的行为。在KNN中,例如,参数能够是用于结算每个神经元的输入用以激活该神经元的权重。
对于每个学习数据组,将对应的学习输入馈给分类器和/或回归器。将对象的由分类器的和/或回归器分别输出的空间取向与属于学习输入的学习输出进行比较。以如下方式优化分类器的和/或回归器的参数,使得分类器和/或回归器根据误差函数至少以预给定的精度将包含在学习集合中的学习输入映射到配属的学习输出上。
如前所述,以这种方式能够使分类器和/或回归器根据有限数量的学习状况为无限多的新状况做准备。
如前所述,有利地,能够以如下方式改变用于接收测量信号的传感器硬件,使得该传感器硬件提供用于导出比目前典型输出的关于反射的信息更详细的信息的接口。但是,原则上借助目前所提供的信息,即在硬件不改变的情况下,所述方法也足以应对。尤其,这些方法能够在软件中实现,所述软件带来直接的顾客利益,即与迄今为止相比能够更精确地求取对象的空间取向或对象的未来轨迹。因此,本发明还涉及一种计算机程序,该计算机程序包含机器可读的指令,当所述指令在计算机上和/或在控制器上实施时,所述指令安排该计算机和/或该控制器实施根据所说明的方法中的一种方法。同样地,本发明还涉及一种具有计算机程序的机器可读的数据载体或者下载产品。
改进本发明的其他措施在下文中与对本发明的优选实施例的描述一起根据附图更详细地示出。
附图说明
附图示出:
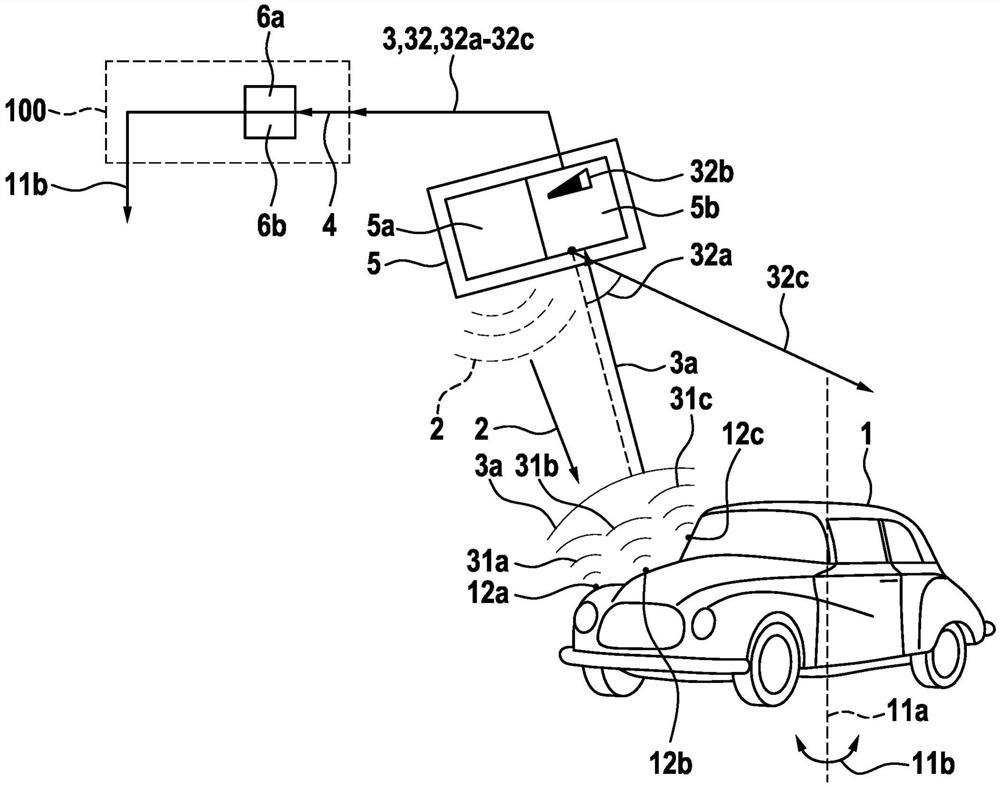
图1为对电磁询问辐射2的应答3a做出的不同贡献31a-31c的示例性叠加;
图2方法100的实施例;
图3对于同一对象1的不同的空间取向11b的贡献31a-31c的空间分布的示例性表示4;
图4方法200的实施例;
图5方法200在四条道路81、82、83、84的交叉路口上的示例性应用状况;
图6方法300的实施例。
具体实施方式
图1示出一种示例性状况,在该示例性状况中,延伸的对象1形成对电磁询问辐射2的应答3a。所使用的测量装置5包括用于询问辐射2的发送器5a以及用于对象1的应答3a的接收器5b。在图1中示出的示例中,对象1是位于位置11a上并且关于垂直地延伸穿过对象1的轴线占据呈旋转角度形式的空间取向11b的车辆。测量装置5借助在图1中未标出的器件从由接收器5a所接收的原始数据中提取反射32,并且将这些反射32作为测量信号3输出。具体来说,针对反射32,分别感测至少一个角度位置32a、至少一个强度32b和与反射32的地点的至少一个距离32c。
借助方法100,从测量信号3中分析评价对象1的空间取向11b。方法100在此利用下述事实:对象1上的每个地点12a-12c都以自己的贡献31a-31c对电磁询问辐射2做出应答并且这些贡献31a-31c叠加成总应答3a。从测量信号3中分析评价这些贡献31a-31c的空间分布的至少二维的表示4,并且由此借助分类器6b和/或借助回归器6b求取对象1的所寻找的空间取向11b。
该方法100在图2中更详细地示出。在可选的步骤110中,从对对象1的物理观察13中首先预分类对象1的类型14。尤其是,物理观察13能够与测量数据3完全地或者部分地重合。在可选的步骤120中,根据类型14选择分类器6a和/或回归器6b。
在步骤130中使用分类器6a和/或回归器6b,以便从测量信号3、32中分析评价对象1的空间取向11b。
为此,根据方框131,例如可以借助包含在测量信号3中的、关于反射32的数据组求取用于将贡献31a-31c的空间分布转变为测量信号3的物理模型。该模型提供这种分布的表示4。
替代地或者也结合地,根据方框132,能够为每个反射32建立sinc函数32d。在此,尤其例如根据方框132a,能够借助已提供测量信号3的测量装置5的物理测量精度确定sinc函数32d的3dB宽度。根据方框133,考虑针对所有反射32分别建立的sinc函数32d的总和用于求取表示4。
无论最终以何种方式得到表示4,在步骤140中,将该表示馈给分类器6a和/或回归器6b并且在那里将该表示进一步处理成对象1的所寻找的空间取向11b。
图3示例性地示意性地示出对于同一对象1以多个不同的空间取向11b从测量信号3中得到的一些表示4。在此引人注目的是,即使在空间取向11固定的情况下,从多个相继接收的测量中求取的表示4也彼此略有区别。尽管如此,所有表示4分别映射到对象1的正确的空间取向11b中的任务仍能够借助机器学习很好地解决。
图4示出方法200的实施例。在步骤210中,从包含对象1对电磁询问辐射2的应答3a在内的测量信号3中求取对象11的位置11a。在步骤220中,借助方法100从相同的测量信号3中求取对象1的空间取向11b。然后,在可选的步骤225中,使用测量信号3以求取对象1的标量速度v。为此目的,相对于起初发射的电磁询问辐射2分析评价多普勒频率偏移。
在步骤230中,从位置11a出发,在考虑标量速度v的状况下根据先前求取的空间取向11b推导对象1的轨迹1a。在步骤240中,将对象1的通过这种方式预测的轨迹1a与待监测的和/或待控制的车辆50的当前行驶轨迹50a和/或规划轨迹50b进行比较。
特定地,在步骤250中检查,对象1的预测的轨迹1a是否与车辆50的当前行驶轨迹50a和/或规划轨迹50b相切、尤其是例如相交。如果是这种状况(真值1),则在步骤260中,激活车辆50的对于车辆50的驾驶员而言能感知的物理警告装置51。替代于此地或者也与此结合地,在步骤270中,能够以如下方式操控车辆50的转向系统52、驱动系统53和/或制动系统54,使得车辆50沿不再与对象1的预测的轨迹1a相切的新轨迹50c行驶。
在图5中绘出方法200的应用示例。在图5所示出的场景中,道路81上的待控制的车辆50接近与三个另外的道路82、83和84的交叉路口。车辆50当前在轨迹50a上行驶。已规划,车辆50直线地沿着轨迹50b沿道路83的方向继续其行驶。
车辆50借助测量装置5监测感测区域2a。为此目的,测量装置5将电磁询问辐射2发射到感测区域2a中并且从那里接收应答3a。
在图5中所示出的状况中,在感测区域2a中,其他车辆记录为在位置11a上的对象1。也记录,其他车辆1以标量速度v接近本车辆50。然而,由此不能够求取其他车辆1的预计意图。可能的是,其他车辆1的驾驶员没有感知到本车辆50并且有意向向左拐入到道路82中。在该情况中,其他车辆1的轨迹1a会与本车辆50的规划轨迹50b相切,即可能发生相撞。然而同样可能的是,其他车辆1的驾驶员有意沿着轨迹1b笔直地继续行驶到道路81中。在这种情况下,不会有与本车辆50的冲突。
在先前说明的方法200的范畴中,从借助测量装置5所记录的测量数据3中附加地求取其他车辆1的空间取向11b,并且将该空间取向11b考虑用于从其他车辆1的当前位置11a出发推导该其他车辆的轨迹1a。
在图5所示出的示例中,由其他车辆1的空间取向11b得知,该车辆1预计将遵循朝道路82的方向引导的轨迹1a。因此,采取对策以避免碰撞。在图5中所示出的示例中,确定避让轨迹50c,本车辆50在该避让轨迹上拐弯到道路84中。
该示例示出,带有一定可靠性地预测其他车辆1的意图是值得期望的。如果车辆1的真实意图是在轨迹1b上朝道路81的方向继续行驶,则在轨迹50c上的避让恰好是本车辆50的错误反应,并且可能会发生碰撞。
图6示出用于训练分类器6a或回归器6b的方法300的实施例。在步骤310中,提供学习数据组7的学习集合,所述学习数据组分别包含作为学习输入7a的、先前所说明的表示4和作为学习输出7b的、对象在所基于的测量中的空间取向11b。
在步骤320中,将学习输入7a馈给分类器6a和/或回归器6b。在步骤330中,将对象1的由分类器6a和/或回归器6b输出的空间取向11b与学习输出7b进行比较。在步骤340中,如此优化分类器6a和/或回归器6b的参数6c、6d,使得在整个学习集合上学习输入7a分别尽可能准确地映射到学习输出7b上。
- 借助于雷达或者通过使用电磁询问辐射来确定对象的取向
- 使用微功率脉冲雷达确定移动显示位置和取向