内生不确定性下基于边缘侧数据的集成控制方法
文献发布时间:2023-06-19 12:07:15
技术领域
本发明涉及工业生产集成控制建模和应用领域,尤其涉及一种内生不确定性下基于边缘侧数据的集成控制方法。
背景技术
实际工业生产过程受到多种不确定因素的干扰,一般可根据不确定参数是否会受控制策略影响将其分为内生不确定性和外生不确定性。
外生不确定性指其不确定性参数的观测过程与控制策略无关,在工业领域,外生不确定性参数一般指市场不确定性,如原料供应、产品需求及其价格等。外生不确定性参数的特点是其观测过程随时间自动发生,如随着时间的流逝,未来的原料及产品价格将会被逐步观测。
内生不确定性是指其不确定参数的观测过程与控制策略有关,而根据控制策略对不确定性参数影响方式的不同,可将其分为1型内生不确定性和2型内生不确定性。在1型内生不确定性中,控制策略会影响不确定参数的概率分布,如设备故障不确定性的概率分布受维修策略的影响。在2型内生不确定性中,控制策略会改变不确定参数的被观测时间,例如在产量不确定下的过程网络的扩容问题中,可以通过安装基于新技术的装置来扩展现有的网络,这些装置的产量(或生产率)是不确定的,只有在新设备安装和运行后,才能确定该装置的具体产量。因此,该控制策略决定了不确定性的观测时间。
目前的企业级控制策略主要包括确定性的企业级控制策略和不确定性下的企业级控制策略,其中不确定性下的企业级控制策略一般为主动预防型控制策略,如鲁棒控制策略或模糊控制策略等,此类控制策略一般过于保守,即牺牲一部分控制性能以保证在最坏不确定性场景下生产系统的稳定运行。
随着边缘侧数据概念的推广与落地,响应式控制策略也在不断发展,即根据生产系统状态的实时变化对控制策略进行调整,此类控制策略对数据采集、传输以及控制策略执行的实施性要求较高。
由于内生不确定性与控制决策耦合,其建模难度较大。目前,主动预防型控制策略和响应式控制策略一般考虑外生不确定性为主,缺乏将内生不确定性考虑在内的集成控制方法。
发明内容
针对现有技术不能对实际工业现场内生不确定性进行精准建模的现状,本发明提供了一种内生不确定性下基于边缘侧数据的集成控制方法,通过基于多阶段随机规划的企业级控制方法,实现对工业现场控制策略质量的提升。
本发明的技术方案如下:
一种内生不确定性下基于边缘侧数据的集成控制方法,包括以下步骤:
(1)从企业数据库和边缘侧数据采集装置中获取工业现场的生产数据和市场数据;所述的生产数据包括生产历史数据和生产实时数据;
(2)根据生产历史数据中内生不确定性参数的概率分布确定预设场景,并生成对应的场景树,构建基于多阶段随机规划的企业级控制模型;
(3)采用基于场景分组的拉格朗日分解算法对企业级控制模型进行求解,得到所有不确定性场景下的基准控制策略;
(4)根据基准控制策略执行具体的生产操作,通过边缘侧数据采集装置实时监控工厂运行状态,基于L2范数进行工厂运行状态与预设场景的匹配;基于匹配的预设场景,对基准控制策略进行调整,优化生产操作计划;
(5)周期性监控市场数据变化,更新企业级控制模型及基准控制策略。
步骤(1)中,所述的市场数据包括企业订单数据、原材料和产品价格数据等,生产数据包括内生不确定性参数的生产实时数据和生产历史数据、库存数据、生产成本数据、后期运维数据和库存成本数据。在得到内生不确定性参数的生产历史数据后,采用k-means聚类算法对内生不确定性参数的生产历史数据进行聚类,得到内生不确定性参数的概率分布。
步骤(2)中所建立的基于多阶段随机规划的企业级控制模型中内生不确定性在相应决策完成后确定,不确定参数的确定时间与控制变量相关,所建立的多阶段随机规划的场景树结构与控制变量耦合,采用广义析取规划建立条件非可预见性约束,生成场景树超结构,通用条件非可预见性约束的数学表达如式(1)-(2)所示:
其中,x
所建立的基于多阶段随机规划的企业级控制模型以企业生产的净现值作为优化目标,包括产品销售收入、原材料成本、中间产品成本、生产成本、运维成本、库存成本以及新设备购置成本,考虑了生产调度约束、库存容量约束、物料平衡约束、时间约束等。
步骤(3)中,采用基于场景分组的拉格朗日分解算法对企业级控制模型进行求解,具体步骤如下:
(3-1)采用大M重构法对广义析取规划约束进行重构,建立等价的混合整数规划约束,具体的重构方法如下:
(3-1-1)对逻辑约束式(2)进行重构得到其合取范式:
其中,x
(3-1-2)引入0-1变量
其中0-1变量
(3-1-3)基于0-1变量
(3-2)根据条件非可预见性约束中场景对间的耦合关系及场景组数,对场景进行分组;
(3-3)保留每个场景组内的初始非可预见性约束和条件非可预见性约束,对场景组间的条件非可预见性约束进行拉格朗日对偶处理,并松弛场景组间的初始非可预见性约束,得到场景组子问题;
(3-4)初始化拉格朗日乘子λ=0,求解每个场景组子问题,得到多阶段随机规划问题的上界;
(3-5)采用启发式算法,根据拉格朗日松弛模型的最优解,得到企业级控制模型的可行解,即多阶段随机规划问题的下界;
(3-6)判断上界和下界是否收敛;若是,则已找到最优控制策略,退出迭代;否则采用次梯度法更新拉格朗日乘子λ,返回步骤(3-4)进行下一轮迭代。
采用次梯度法更新拉格朗日乘子λ的具体过程如式(9)所示:
其中λ
步骤(4)中,基于L2范数的场景匹配方法具体操作如下:假设企业级控制模型中包含{ξ
与现有技术相比,本发明的有益效果为:
相对于传统方法,本发明内生不确定性下基于边缘侧数据的集成控制方法,首先采用K-means聚类从生产历史数据中提取内生不确定参数的离散概率分布,建立基于多阶段随机规划的企业级控制模型,并采用基于场景组的拉格朗日分解算法对企业级控制模型进行求解确定最优基准控制策略,并通过边缘侧数据实时监控工厂运行状态,通过场景匹配对基准控制策略进行实时调整,这种方法精准刻画了内生不确定性与控制变量间的关系,随机过程与控制策略之间的相互作用,使得决策者可以根据不确定性的观测值来实时调整控制策略,提升控制策略的质量。
附图说明
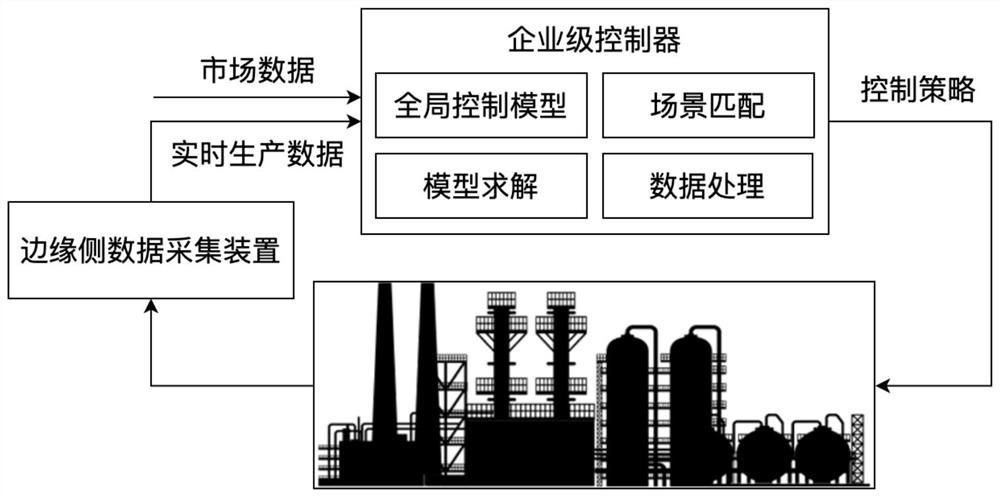
图1内生不确定性下基于边缘侧数据的集成控制过程示意图;
图2内生不确定性下基于边缘侧数据的集成控制方法流程示意图;
图3场景树超结构示例图;
图4基于多阶段随机规划的企业级控制模型分解方案示意图;
图5拉格朗日分解算法中启发式规则示意图;
图6确定企业级控制模型的控制策略示意图;
图7随机控制模型控制策略及场景1中基准控制策略调整过程示意图;
图8随机控制模型控制策略及场景2中基准控制策略调整过程示意图;
图9随机控制模型控制策略及场景3中基准控制策略调整过程示意图;
图10随机控制模型控制策略及场景4中基准控制策略调整过程示意图。
具体实施方式
下面结合附图和实施例对本发明作进一步详细描述,需要指出的是,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。
以页岩气田开采问题为例,如图1和图2所示,内生不确定性下基于边缘侧数据的集成控制方法的具体步骤如下:
(1)结合市场调研报告及财务报告,获取天然气和石油价格、开采操作成本、后期生产和运维成本等数据。
根据地质勘探报告,获取页岩气井的区域划分数据、页岩气井及钻井平台备选位置数据、输气管道容量数据、钻塔数据各区域产量。在页岩气田开采问题中,内生不确定性主要为各区域的产量不确定性{θ
(2)获取页岩气田各区域产量的历史数据后,分别针对各区域采用k-means聚类算法对各区域产量不确定性参数进行聚类。
设置聚类数目k=2,对θ
基于上述步骤中模型参数及产量不确定性参数的概率分布,建立基于多阶段随机规划的企业级控制模型,企业级控制模型模型中产量不确定性在相应决策完成后确定,不确定参数的确定时间与控制变量相关,所建立的多阶段随机规划的场景树结构与控制变量耦合,采用广义析取规划建立耦合关系的条件非可预见性约束,生成场景树超结构如图3所示,基于多阶段随机规划的企业级控制模型如式(12)-(26)所示:
max NPV=∑
其中,目标函数(12)为最大化净现值NPV,包括产品销售所得收入REV、生产及运维成本Cost1、钻井平台搭建成本Cost2和页岩气井开采成本Cost3;p
式(17)为页岩气井开采次数约束;式(18)为钻井平台容量约束;式(19)为开采能力约束;式(20)-(21)为天然气及石油流量计算约束;式(22)为管道容量约束;式(23)为现金流约束;式(24)为初始非可预见性约束;式(25)-(26)为条件非可预见性约束。
(3)为了对模型(12)-(26)进行有效求解,采用基于场景分组的拉格朗日分解算法对企业级控制模型进行求解,具体步骤如下:
(3-1)采用大M重构法对广义析取规划约束进行重构,建立等价的混合整数规划约束,具体的重构方法如下:
(3-1-1)对逻辑约束式(26)进行重构得到其合取范式:
其中,x
(3-1-2)引入0-1变量
其中0-1变量
(3-1-3)基于0-1变量
(3-2)根据条件非可预见性约束中场景对间的耦合关系及场景组数,对场景进行分组;
(3-3)保留每个场景组内的初始非可预见性约束和条件非可预见性约束,对场景组间的条件非可预见性约束进行拉格朗日对偶处理,并松弛场景组间的初始非可预见性约束,得到场景组子问题,如图4所示;
(3-4)初始化拉格朗日乘子λ=0,求解每个场景组子问题,得到多阶段随机规划问题的上界;
(3-5)采用启发式算法(启发式算法规则如图5所示),根据松弛问题的最优解,得到原问题的可行解,即多阶段随机规划问题的下界;
(3-6)判断上下界是否收敛。若是,则已找到最优解退出迭代,否则采用次梯度法更新拉格朗日乘子λ,返回步骤(3-4)进行下一轮迭代;采用次梯度法更新拉格朗日乘子λ的具体过程如式(33)所示:
其中λ
(4)得到基准控制策略后,首先根据基准控制策略进行第一阶段的控制决策,在第一阶段控制决策生效后可以获得若干区域内生不确定性参数的观测值,根据预设场景集
图6为不考虑产量不确定性的企业级控制策略,该策略会根据产量期望值大小确定各区域的开采顺序,风险较高。图7-图10为考虑产量不确定性的企业级集成控制模型的基准控制策略及其在四个不同场景下的基准控制策略调整过程。在第一阶段,基准策略会探索两个区域以得到其产量不确定性的观测值,以便对冲产量不确定性所带来的风险并可在后期进一步调整控制策略。四个场景中,因产量不确定性观测值的不同,其基准策略的调整也会不同。在场景1和和场景3中,区域2的真实产量较高,区域1的真实产量较低,所以会在剩余开采阶段会优先开采区域2的备选井。在场景2和场景4中,区域1的真实产量较高,区域2的真实产量较低,所以会在剩余开采阶段会优先开采区域2的备选井。
(5)周期性监控市场数据变化,更新企业级控制模型及基准控制策略。
以上所述的实施例对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的具体实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充和等同替换等,均应包含在本发明的保护范围之内。
- 内生不确定性下基于边缘侧数据的集成控制方法
- 数据驱动下基于风电不确定性的电热气网三阶段调度方法