多功能智慧灯杆、定位控制系统及定位控制方法
文献发布时间:2023-06-19 12:08:44
技术领域
本申请涉及智慧灯杆技术领域,特别是涉及一种多功能智慧灯杆、定位控制系统及定位控制方法。
背景技术
智慧多功能灯杆整合了微基站、路灯照明、交通管理、公共安全、公安视频监控、智慧道路、市政管理等功能,是智慧城市建设的基础末端感知设备。在城市升级改造,新建市政道路,智慧城市建设等项目实施时,进行多杆合一,极大地提升了城市智慧化等级。随着城市管理的人、车、物信息管理需求数据越来越大,原有的各种定位手段不能完全满足需求。
在实现过程中,发明人发现传统技术中至少存在如下问题:现有多功能智慧灯杆的定位误差大,在导航及自动驾驶等定位应用上,定位精度满足不了日后需求。目前有部分UWB定位功能件试用安装到户外灯杆上,但因技术不配套,无法对接管理应用平台,达不到实用阶段。而现有的多功能智慧杆的定位精度不高,很多应用场景存在各种问题,如误报、轨迹不清、位置偏差太大、使用成本高等。
发明内容
基于此,有必要针对传统的多功能智慧灯杆的定位误差大、定位轨迹不清、位置偏差太大、使用成本高的问题,提供一种多功能智慧灯杆、定位控制系统及定位控制方法。
为了实现上述目的,本发明实施例提供了一种多功能智慧灯杆,包括:
灯杆本体,灯杆本体设置在道路侧边,灯杆本体包括杆座、灯座以及设于杆座和灯座之间的灯杆;灯杆上设置有第一支撑件;
照明灯组,照明灯组设置在灯座上;
UWB基站,UWB基站设置在第一支撑件上,且UWB基站与灯杆之间的距离在第一预设范围值内;
控制柜,控制柜设置在杆座内,控制柜用于与照明灯组电性连接,以控制照明灯组发光;控制柜用于与UWB基站电性连接,以控制UWB基站发射或接收定位信号。
在其中一个实施例中,控制柜包括用于电性连接市电电缆的电力分配器,以及用于通信连接通信光缆的物联网网关模块;
电力分配器分别与照明灯组、UWB基站、物联网网关模块电性连接;物联网网关模块与UWB基站通信连接。
在其中一个实施例中,还包括分别电性连接电力分配器、物联网网关模块的显示屏;灯杆上设置有第二支撑件,显示屏设置在第二支撑件上,且第二支撑件位于第一支撑件下方。
在其中一个实施例中,还包括分别电性连接电力分配器、物联网网关模块的摄像头;摄像头设置在第一支撑件上,且摄像头位于UWB基站下方。
在其中一个实施例中,还包括分别电性连接电力分配器、物联网网关模块的通信基站;灯座上设置有基站安装区,通信基站设置在基站安装区。
在其中一个实施例中,通信基站与UWB基站的垂直距离在第二预设范围值内;UWB基站的高度在第三预设范围值内。
在其中一个实施例中,第一预设范围值为1500至1600毫米之间;第二预设范围值为1500至1600毫米之间;第三预设范围值为3500至5500毫米之间。
在其中一个实施例中,通信基站包括4G基站和5G基站。
另一方面,本发明实施例还提供了一种多功能智慧灯杆的定位控制系统,包括待定位设备,中控平台,以及若干个上述任意一项的多功能智慧灯杆;待定位设备与UWB基站通信连接;中控平台分别与待定位设备、控制柜通信连接;
待定位设备用于向各UWB基站发射UWB信号,以使信号覆盖范围内的各UWB基站分别接收UWB信号,并分别生成相应的定位响应信号;
待定位设备还用于向中控平台发送定位请求,以使中控平台根据定位请求,向控制柜传输定位控制指令;控制柜用于根据定位控制指令,向各UWB基站分别发送定位控制信号,以使各UWB基站反馈相应的定位响应信号。
另一方面,本发明实施例还提供了一种多功能智慧灯杆的定位控制方法,包括以下步骤:
接收待定位设备发送的定位请求,并根据定位请求,向控制柜传输定位控制指令;定位控制指令用于指示控制柜向各UWB基站分别发送定位控制信号,以使各UWB基站反馈相应的定位响应信号;
获取控制柜传输的各定位响应信号;定位响应信号为待定位设备向各UWB基站发射UWB信号,以使信号覆盖范围内的各UWB基站分别接收UWB信号,并根据UWB信号生成得到。
上述技术方案中的一个技术方案具有如下优点和有益效果:
上述的多功能智慧灯杆的各实施例中,通过将灯杆本体设置在道路侧边,灯杆本体包括杆座、灯座以及设于杆座和灯座之间的灯杆;灯杆上设置有第一支撑件;照明灯组设置在灯座上;UWB基站设置在第一支撑件上,且UWB基站与灯杆之间的距离在第一预设范围值内;通过将控制柜设置在杆座内,控制柜与照明灯组电性连接,进而控制柜能够控制照明灯组发光,实现多功能智慧灯杆的正常照明功能;通过控制柜与UWB基站电性连接,控制柜能够控制UWB基站发射或接收定位信号,并将定位信号反馈给中控平台,从而中控平台可根据定位信号,处理得到待定位设备所需的定位信息,实现多功能智慧灯杆的定位控制功能,进而提高了多功能智慧灯杆的定位精度,定位误差小,定位信息精准,且使用成本低,实现城市及道路区域的人流、物流、车流的全覆盖管理,如能够在电子围栏、自动驾驶、地图导航、共享单车(助力车)、电动自行车、城市停车管理、市政设施管理、交通密度管理及违章处理、城市巡查等方面实现定位管理应用,提高了多功能智慧灯杆的应用场景。
附图说明
图1为一个实施例中多功能智慧灯杆的第一电路方框示意图;
图2为一个实施例中多功能智慧灯杆的第二电路方框示意图;
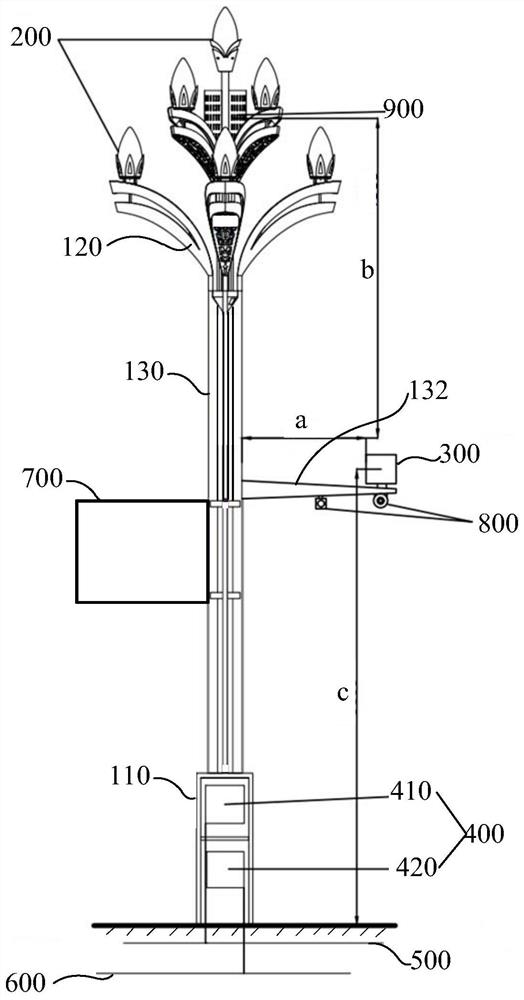
图3为一个实施例中多功能智慧灯杆的结构示意图;
图4为一个实施例中多功能智慧灯杆的定位控制系统的方框示意图;
图5为一个实施例中多功能智慧灯杆的定位控制方法的流程示意图。
具体实施方式
为了使本技术领域的人员更好地理解本申请方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分的实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
需要说明的是,在结构或功能不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
在一个实施例中,如图1和3所示,本发明提出一种多功能智慧灯杆,该多功能智慧灯杆包括灯杆本体、照明灯组200、UWB基站300和控制柜400。灯杆本体设置在道路侧边,灯杆本体包括杆座110、灯座120以及设于杆座110和灯座120之间的灯杆130;灯杆130上设置有第一支撑件132;照明灯组200设置在灯座120上;UWB基站300设置在第一支撑件132上,且UWB基站300与灯杆130之间的距离在第一预设范围值a内;控制柜400设置在杆座110内,控制柜400用于与照明灯组200电性连接,以控制照明灯组200发光;控制柜400用于与UWB基站300电性连接,以控制UWB基站300发射或接收定位信号。
其中,灯杆本体可设置在道路侧边,例如道路可以到不限于是城市道路、小区道路、工业园区道路和停车场道路。灯杆本体的材质可以是金属材料,也可以是非金属材质。灯杆本体可划分为灯座120、灯杆130和杆座110;其中灯杆130连接在灯座120和杆座110之间,灯杆130与灯座120和杆座110之间的连接关系可以但不限于是螺栓连接,销接,焊接或卡接等方式连接,另外灯杆130与灯座120和杆座110之间,也可以采用一体化成型方式,例如,采用冲压方式,压铸方式,挤压方式等方式实现。杆座110可通过螺栓连接方式紧固在道路侧边的地面上。灯杆130可以是中空圆柱状灯杆,灯杆130的中空结构分别与灯座120和杆座110连通,进而信号线和电性连接金属线(如铜线或铝线等)能隐藏收纳在灯杆130内部的中空结构内,提升灯杆本体的整体美观。
照明灯组200可包括多个照明灯,照明灯可以是LED灯;灯座120可包括多个子灯座,各个LED灯可分别设置在子灯座上。照明灯组200的电性连接金属线可穿过灯杆130的内部中空结构后连接在控制柜400上。UWB(Ultra Wide Band,超宽带)基站300指的是一种基于UWB定位技术的基站设备,可用来接收或发送UWB信号从而实现定位功能;UWB基站300的电性连接金属线和信号线可穿过灯杆130的内部中空结构后连接在控制柜400上。例如UWB基站300可接收待定位设备发送的UWB信号,UWB基站300还可以将接收到的UWB信号传输给控制柜400,通过控制柜400反馈到中控平台上。在一个示例中,UWB基站300可由天线,内部电路板和外壳组成,天线可分为内置天线和外置天线。
第一支撑件132可以是金属材质的支撑件,也可以是非金属材质的支撑件。第一支撑件132可垂直设置在灯杆130上,如第一支撑件132的第一端可通过螺栓连接,销接,焊接或卡接等方式固定连接在灯杆130上,UWB基站300可设置在第一支撑件132的第二端上,使得UWB基站300与灯杆130之间的垂直距离满足在第一预设范围值内。其中第一支撑件132的长度可根据第一预设范围值而确定。控制柜400可用来分别控制照明灯组200和UWB基站300的启动或断开,控制柜400还可用来接收UWB基站300传输的UWB信号。在一个示例中,控制柜400可电源输入线可穿过地面,并连接到地面下的市电电缆500上;控制柜400的信号输出线可穿过地面,并连接到地面下的通信光缆600上。
具体而言,通过将灯杆本体设置在道路侧边,进而可实现对城市道路、小区道路、工业园区道路和停车场道路灯区域的定位控制。通过在灯杆130上设置有第一支撑件132,UWB基站300设置在第一支撑件132上,且UWB基站300与灯杆130之间的距离在第一预设范围值a内,进而可避免UWB基站300远离强电线的噪音干扰,提高UWB基站300的定位精度。其中第一预设范围值a可根据UWB基站300的具体型号而确定,在一个示例中,第一预设范围值a为1500至1600毫米之间。通过将照明灯组200设置在灯座120上;通过将控制柜400设置在杆座110内,控制柜400与照明灯组200电性连接,进而控制柜400能够控制照明灯组200发光,实现多功能智慧灯杆的正常照明功能;通过控制柜400与UWB基站300电性连接,控制柜400能够控制UWB基站300发射或接收定位信号,并将定位信号反馈给中控平台,从而中控平台可根据定位信号,处理得到待定位设备所需的定位信息,实现多功能智慧灯杆的定位控制功能,进而提高了多功能智慧灯杆的定位精度,定位误差小,定位信息精准,且使用成本低,实现城市及道路区域的人流、物流、车流的全覆盖管理,如能够在电子围栏、自动驾驶、地图导航、共享单车(助力车)、电动自行车、城市停车管理、市政设施管理、交通密度管理及违章处理、城市巡查等方面实现定位管理应用,提高了多功能智慧灯杆的应用场景。
在一个实施例中,如图2和3所示,控制柜400包括用于电性连接市电电缆500的电力分配器410,以及用于通信连接通信光缆600的物联网网关模块420;电力分配器410分别与照明灯组200、UWB基站300、物联网网关模块420电性连接;物联网网关模块420与UWB基站300通信连接。
其中,电力分配器410可用对市电电缆的输入电源进行转换,分别输出能够满足UWB基站300以及照明灯组200等供电的输出电源。例如,电力分配器410设有DC24V(即24伏的直流电)供电接口,UWB基站300的电源端口可通过电源线连接在电力分配器410的DC24V供电接口,进而实现对UWB基站300的供电。在一个示例中,电力分配器410的各供电接口分别设置有用电计量模块,通过用电计量模块可实时监测各个供电接口的输出电量,进而能够实时了解多功能智慧灯杆上各个模块的用电情况。
物联网网关模块420的一端可通过信号线与UWB基站300通信连接,另一端可用来连接通信光缆600,通信光缆600连接在中控平台上,进而UWB基站300的定位数据依次通过物联网网关模块420和通信光缆600传输至中控平台,通过中控平台对定位数据进行处理,进而实现相应的定位管理功能。在一个示例中,信号线可采用通用网线,通过标准以太网接口接入物联网网关模块420,通过物联网网关模块420接入通信光缆600(如第三方服务光缆),通过光缆连接中控平台(如控制中心管理平台)。物联网网关模块420具备流量计量功能。物联网网关模块420的各以太网接口分别设置有流量计量模块,通过流量计量模块可实时监测各个以太网接口的输出流量,进而能够实时了解多功能智慧灯杆上相应模块的流量使用情况。
在一个实施例中,如图2和3所示,多功能智慧灯杆还包括分别电性连接电力分配器410、物联网网关模块420的显示屏700;灯杆130上设置有第二支撑件(未示出),显示屏700设置在第二支撑件上,且第二支撑件位于第一支撑件132下方。
其中,显示屏700可以是LED显示屏;显示屏700可用来显示交通道路信息,如交通道路信息可以但不限于是交通信号指示、交通标志、智能停车的数量、车路协同信息和交通智能管理信息等。第二支撑件可以是金属材质的支撑件,也可以是非金属材质的支撑件。第二支撑件可垂直设置在灯杆上,如第二支撑件的第一端可通过螺栓连接,销接,焊接或卡接等方式固定连接在灯杆130上,显示屏700可设置在第二支撑件的第二端上。第二支撑件位于第一支撑件132下方,即使得UWB基站300位于显示屏700的之上,进而可避免UWB基站300与显示屏700之间的信号干扰,提高UWB基站的定位精度。
需要说明的是,显示屏可根据具体的应用场景决定是否配置,例如可根据具体的路段环境决定确认是否在多功能智慧灯杆上配置显示屏。
在一个实施例中,如图2和3所示,多功能智慧灯杆还包括分别电性连接电力分配器410、物联网网关模块420的摄像头800;摄像头800设置在第一支撑件132上,且摄像头800位于UWB基站300下方。
其中,基于摄像头800电性连接电力分配器410,进而可通过电力分配器410向摄像头800供电;通过摄像头800与物联网网关模块420通信连接,进而摄像头800可实时监控道路视频数据和道路图像数据,并可将得到视频数据和图像数据通过物联网网关模块420传输给中控平台,进而中控平台可根据视频数据和道路图像数据,并结合UWB基站300传输的定位信号,实现对电子围栏、自动驾驶、地图导航、共享单车(助力车)、电动自行车、城市停车管理、市政设施管理、交通密度管理及违章处理、城市巡查等方面实现智能化的管理,进而实现城市及道路区域的人流、物流、车流的全覆盖管理。
进一步的,摄像头800可设置在第一支撑件130的第二端上,且摄像头800位于UWB基站300下方,进而可避免UWB基站300与摄像头800之间的信号干扰,提高UWB基站300的定位精度。
需要说明的是,摄像头可根据具体的应用场景决定是否配置,例如可根据具体的路段环境决定确认是否在多功能智慧灯杆上配置摄像头。
在一个实施例中,如图2和3所示,多功能智慧灯杆还包括分别电性连接电力分配器410、物联网网关模块420的通信基站900;灯座120上设置有基站安装区(未示出),通信基站900设置在基站安装区。
其中,通信基站900可以但不限于是4G基站和5G基站。基站安装区可位于灯座120的顶部,通信基站900可通过螺栓连接,销接,焊接或卡接等方式固定设置在基站安装区。
具体地,基于通信基站900电性连接电力分配器410,进而可通过电力分配器410向通信基站900供电;通过通信基站900与物联网网关模块420通信连接,进而通信基站900可增强信号覆盖强度,使得在偏僻的道路仍然具有无线通信信号,从而方便用户终端的无线使用连接,进一步的实现城市及道路区域的人流、物流、车流的全覆盖管理。
进一步的,通信基站900与UWB基站300之间的垂直距离在第二预设范围值b内,通过对通信基站900与UWB基站300之间进行预设距离的间隔设置,进而可避免UWB基站300与5G等通信基站900之间的噪音干扰,提高UWB基站300的定位精度,其中第二预设范围值b可根据定位及市政设施需求以及UWB无线信号特征而确定,例如第二预设范围值b为1500至1600毫米之间。UWB基站300的高度在第三预设范围值c内,通过对UWB基站300与地面之间进行预设距离的间隔设置,进而可避免UWB基站300与靠近地面设置控制柜400之间的噪音干扰,进一步提高UWB基站300的定位精度,其中第三预设范围值c可根据定位及市政设施需求以及UWB无线信号特征而确定,例如第三预设范围值c为3500至5500毫米之间。
需要说明的是,所述UWB基站的高度设置与道路的类型及道路场景有关,例如,多功能智慧灯杆设置在主道路或辅路,而UWB基站设置的主道路的高度要大于设置在辅路的高度。
在一个示例中,多功能智慧灯杆还包括分别电性连接电力分配器、物联网网关模块的WIFI模块;灯座上设置有WIFI模块安装区,通信基站设置在WIFI模块安装区。通过设置WIFI模块,进而可向用户终端提供公共无线网,使得用于在相应城市道路上随时可连接公共无线网。
在一个示例中,可根据多功能智慧灯杆的安装密度及安装间距来选择UWB基站的机型,UWB基站可选用无线信号传输距离为50-100m的机型,另外其工作电压为DC24V,具有标准以太网接口,工作温度为-25℃~70℃,防水等级为IP67,天线类型为全向工作天线。
在一个示例中,多功能智慧灯杆的造型可根据用户需求设计,在灯杆上设置挂载UWB基站的连接接口装置,可以是抱箍连接,也可以是法兰基座连接;或者根据周边场景,可以用悬臂挂接或与灯杆直接连接。
需要说明的是,本申请的多功能智慧灯杆配置了UWB基站,将UWB定位技术应用到多功能智慧灯杆上,进而实现上述的在不同应用场景的定位功能。本申请的多功能智慧灯杆上还具体其他的功能,其他的功能可根据实际应用场景选配。例如,在停车路段道路两侧的多功能智慧灯杆可具有显示剩余停车位以及停车状态等信息,进而可在多功能智慧灯杆上配置显示屏;又如,在某些商业中心的道路两侧,为了方便行人对手机等移动终端进行充电,进而可在多功能智慧灯杆上配置充电插座,在此不再一一列举。
在一个实施例中,如图4所示,还提供了一种多功能智慧灯杆的定位控制系统,包括待定位设备20,中控平台30,以及若干个上述任意一项的多功能智慧灯杆10;待定位设备20与UWB基站300通信连接;中控平台30分别与待定位设备20、控制柜400通信连接。
待定位设备20用于向各UWB基站300发射UWB信号,以使信号覆盖范围内的各UWB基站300分别接收UWB信号,并分别生成相应的定位响应信号;待定位设备20还用于向中控平台30发送定位请求,以使中控平台30根据定位请求,向控制柜400传输定位控制指令;控制柜400用于根据定位控制指令,向各UWB基站300分别发送定位控制信号,以使各UWB基站300反馈相应的定位响应信号。
其中,待定位设备20指的是具有UWB功能的设备,例如待定位设备20可以但不要限于是汽车、电动自行车、共享单车(或共享助力车)、用户终端(如手机)等。待定位设备20可包括UWB标签卡,通过UWB标签卡可对外发射UWB信号,在无线信号覆盖的范围内的所有多功能智慧灯杆上的UWB基站300都会收到无线信号,如果两个已知坐标点的UWB基站300收到信号,标签卡距离两个UWB基站300的间隔不同,那么这两个UWB基站300收到的时间点是不一样的,进而可以计算出标签卡所处的位置,从而实现对具有相应标签卡的待定位设备的精准定位。中控平台30可以是多功能智慧杆的管理控制平台,也可以是智慧城市综合管理平台或政府数据管理中心平台
具体而言,多功能智慧灯杆10包括灯杆本体、照明灯组200、UWB基站300和控制柜400,通过将灯杆本体设置在道路侧边,进而可实现对城市道路、小区道路、工业园区道路和停车场道路灯区域的定位控制。通过在灯杆130上设置有第一支撑件132,UWB基站300设置在第一支撑件132上,且UWB基站300与灯杆130之间的距离在第一预设范围值内,进而可避免UWB基站300远离强电线的噪音干扰,提高UWB基站300的定位精度。通过将照明灯组200设置在灯座120上;通过将控制柜400设置在杆座110内,控制柜400与照明灯组200电性连接,进而控制柜400能够控制照明灯组200发光,实现多功能智慧灯杆10的正常照明功能;通过控制柜400与UWB基站300电性连接,控制柜400能够控制UWB基站300发射或接收定位信号,并将定位信号反馈给中控平台30,从而中控平台30可根据定位信号,处理得到待定位设备20所需的定位信息,实现多功能智慧灯杆10的定位控制功能,进而提高了多功能智慧灯杆10的定位精度,定位误差小,定位信息精准,且使用成本低。
进一步的,通过待定位设备20与多功能智慧灯杆10的UWB基站300通信连接;中控平台30分别与待定位设备20、多功能智慧灯杆10的控制柜400通信连接;待定位设备20向各多功能智慧灯杆10上的UWB基站300发射UWB信号,使得信号覆盖范围内的各UWB基站300分别接收UWB信号,并分别生成相应的定位响应信号;待定位设备20还可向中控平台30发送定位请求,使得中控平台30根据定位请求,向控制柜400传输定位控制指令;进而控制柜400根据定位控制指令,向各UWB基站300分别发送定位控制信号,使得各UWB基站300反馈相应的定位响应信号中控平台30,进而中控平台30可实时监控待定位设备20的定位信息。另外,中控平台30还可将定位响应信号传输给待定位设备20,进而用户可通过待定位设备20实时查看自身的定位信息。实现城市及道路区域的人流、物流、车流的全覆盖管理,如能够在电子围栏、自动驾驶、地图导航、共享单车(助力车)、电动自行车、城市停车管理、市政设施管理、交通密度管理及违章处理、城市巡查等方面实现定位管理应用,提高了多功能智慧灯杆的应用场景。
在一个示例中,待定位设备可以是汽车,通过在城市道路高密度布置的多功能智慧灯杆,通过多功能智慧灯杆设置UWB基站,确认车与车,车与物,车与其他运动物体的距离及运动轨迹,实现自动驾驶辅助定位,进而能够提高自动驾驶的安全性,提高自动泊车的准确性。待定位设备可以是汽车或用户终端(如手机),利用UWB基站的高精准定位精度,结合多功能智慧灯杆的分布密度,可实现3D精准定位的地图导航,提供车、人的实时三维位置定位。解决了现有GPS在三维定位精度上的不足。特别适用于大城市立交林立场景。待定位设备可以是特定的终端设备,通过UWB基站的实时高精准定位的多功能智慧灯杆进行专项跟踪管理,结合多功能智慧灯杆的视频监控功能,能实时报警取证,实现对特定场合、特定使用人、需要限定区域管理的物(含危险物)的电子围栏监控功能。待定位设备可以是共享单车,在具有UWB功能的多功能智慧灯杆的信号覆盖范围,可对共享单车的行驶轨迹做记录,并结合多功能智慧灯杆的视频功能进行记录留存证据,实现对共享单车的停车存放可定位到指定停放车位管理,杜绝乱停乱放,进而实现辅助交通管理。待定位设备可以是电动助力车(含共享助力车),通过多功能智慧灯杆上设置的UWB基站,利用UWB基站的高精准定位技术,可以对助力车的行驶轨迹进行实时监督管控,管控不按交规规定的车道行驶,减少违章行驶和交通事故。对电动助力车的停放及充电安全进行监督管控,减少安全事故。结合高密度智慧杆的视频功能进行报警取证,并可通过管理应用平台及时通知警告车主。
在一个示例中,通过本申请上述提供的多功能智慧灯杆的定位控制系统,可实现市区停车管理。具体地,停车管理涉及到室外室内,对于室外停车,通过多功能智慧灯杆的UWB基站的UWB定位功能,能够对室外停车进行实时的定位监控,且停车位建设成本比传统的地磁或人力看管,视频桩等的低很多,运营维护成本也低很多;结合ETC或微信支付宝等支付手段,应用智慧杆的视频取证,提高停车便利的同时极大的减少逃费比率。对于室内停车场,提高辅助泊车精度的同时,弥补了GPS室内定位信号弱的缺陷,方便人找车和室内定位的准确。
在一个示例中,通过本申请上述提供的多功能智慧灯杆的定位控制系统,可实现市政设施管理。例如可对道路上的井盖安装UWB定位标签卡,结合多功能智慧灯杆布局的容量密度,可以感知到井盖的细微三维位移,及时报警维护,减少因井盖缺失破损造成的安全事故。另外,还可对垃圾桶安装UWB定位标签卡,可实现对垃圾桶的高精度定位,防止垃圾桶丢失。
在一个示例中,通过本申请上述提供的多功能智慧灯杆的定位控制系统,多功能智慧灯杆遍布道路两旁,可实时统计分析每条路段的车流量,并可精准到每条车道的行车数量,这样就可以精准的控制路口交通管制灯按实际需要精准放行,提高道路通行及利用效率,减少拥堵,节能减排。并通过数据统计,给市政建设提供数据依据。可以记录车辆的实时运动轨迹,速度,结合智慧杆视频为交通事故的判定提供证据。
在一个示例中,通过本申请上述提供的多功能智慧灯杆的定位控制系统,基于多功能智慧灯杆上的UWB基站和摄像头等模块,可实现在线实时城市巡查,警告驱离,调查取证,风险管控。另外,结合多功能智慧灯杆上的UWB基站与室内的UWB基站形成一张三维的实时定位网,实时监控出租屋的人员信息,极大地提高了管理效率和准确性,杜绝了管理漏洞。
在一个实施例中,如图5所示,还提供了一种多功能智慧灯杆的定位控制方法,包括以下步骤:
步骤S510,接收待定位设备发送的定位请求,并根据定位请求,向控制柜传输定位控制指令;定位控制指令用于指示控制柜向各UWB基站分别发送定位控制信号,以使各UWB基站反馈相应的定位响应信号。
步骤S520,获取控制柜传输的各定位响应信号;定位响应信号为待定位设备向各UWB基站发射UWB信号,以使信号覆盖范围内的各UWB基站分别接收UWB信号,并根据UWB信号生成得到。
具体而言,待定位设备向各多功能智慧灯杆上的UWB基站发射UWB信号,使得信号覆盖范围内的各UWB基站分别接收UWB信号,并分别生成相应的定位响应信号,实现多功能智慧灯杆的定位控制功能,提高了多功能智慧灯杆的定位精度,定位误差小,定位信息精准,且使用成本低;待定位设备还可向中控平台发送定位请求,使得中控平台根据定位请求,向控制柜传输定位控制指令;进而控制柜根据定位控制指令,向各UWB基站分别发送定位控制信号,使得各UWB基站反馈相应的定位响应信号中控平台,进而中控平台可实时监控待定位设备的定位信息。另外,中控平台还可将定位响应信号传输给待定位设备,进而用户可通过待定位设备实时查看自身的定位信息,实现了城市及道路区域的人流、物流、车流的全覆盖管理,如能够在电子围栏、自动驾驶、地图导航、共享单车(助力车)、电动自行车、城市停车管理、市政设施管理、交通密度管理及违章处理、城市巡查等方面实现定位管理应用,提高了多功能智慧灯杆的应用场景。
应该理解的是,虽然图5的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图5中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
在一个实施例中,还提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述任一项的多功能智慧灯杆的定位控制方法的步骤。
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各除法运算方法的实施例的流程。其中,本申请所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(ROM)、可编程ROM(PROM)、电可编程ROM(EPROM)、电可擦除可编程ROM(EEPROM)或闪存。易失性存储器可包括随机存取存储器(RAM)或者外部高速缓冲存储器。作为说明而非局限,RAM以多种形式可得,诸如静态RAM(SRAM)、动态RAM(DRAM)、同步DRAM(SDRAM)、双数据率SDRAM(DDRSDRAM)、增强型SDRAM(ESDRAM)、同步链路(Synchlink)DRAM(SLDRAM)、存储器总线(Rambus)直接RAM(RDRAM)、直接存储器总线动态RAM(DRDRAM)、以及存储器总线动态RAM(RDRAM)等。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 多功能智慧灯杆、定位控制系统及定位控制方法
- 一种基于5G通信的多功能智慧灯杆控制系统及控制方法