一种收边龙骨转移包装装置
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及龙骨生产包装技术领域,具体涉及一种收边龙骨转移包装装置。
背景技术
龙骨,是用来支撑造型、固定结构的一种建筑材料。广泛应用于宾馆、候机楼。客运站、车站、剧场、商场、工厂、办公楼、旧建筑改造、室内装修设置、顶棚等场所。龙骨是装修的骨架和基材,使用非常普遍。收边龙骨通过由两个边缘对称龙骨扣合在一起使用,在现有生产线生产过程中,需要人工将收边龙骨进行扣合,并且需要手动组合多组扣合后的收边龙骨,便于进行整体打包,从而对生产线节拍造成较大影响。因此现有技术中存在收边龙骨不便进行扣合及转移包装的问题。
发明内容
本发明的目的在于提供一种收边龙骨转移包装装置,以解决现有收边龙骨不便扣合及转移包装的问题。
本发明解决上述技术问题的技术方案如下:
一种收边龙骨转移包装装置,包括:第一输送机、第二输送机、第三输送机以及控制芯片;
第一输送机和第三输送机的延伸方向一致,第一输送机上设有与其延伸方向垂直的伸缩推杆;
第二输送机的延伸方向与第一输送机的延伸方向垂直,并且位于第一输送机和第三输送机之间,第二输送机上设有第一伸缩挡杆,第一伸缩挡杆旁侧设有翻转机构,第二输送机靠近第三输送机的端部设有堆积挡板,堆积挡板上方设有转移机构;
伸缩推杆、第一伸缩挡杆、翻转机构以及转移机构分别与控制芯片通信连接。
本发明收边龙骨沿第一输送机进行传送,伸缩推杆定时向外侧伸出,将收边龙骨推入到第二输送机上;第二输送机上的收边龙骨移动至第一伸缩挡杆时,翻转机构开始动作,夹持收边龙骨并对其进行竖直翻转,当下一根收边龙骨抵达第一伸缩挡杆时,翻转机构松开收边龙骨并复位,使两根收边龙骨呈对合状,第一伸缩挡杆再缩回,使对合后的收边龙骨移动至堆积挡板处,当堆积到一定数量后,再由转移机构一并抓取移动至第三输送机上方进行输出包装,从而解决现有收边龙骨不便扣合及转移包装的问题。
进一步地,上述翻转机构包括竖直设置的旋转盘、设置在旋转盘上的翻转夹爪以及用于驱动旋转盘的翻转电机,翻转电机和翻转夹爪分别与控制芯片通信连接。
本发明的翻转夹爪用于夹持收边龙骨,并随旋转盘进行翻转,从而使夹持的收边龙骨呈倒立,便于与下一根收边龙骨进行扣合。
进一步地,上述二输送机上设有与控制芯片通信连接的第二伸缩挡杆,第二伸缩挡杆位于第一输送机和第一伸缩挡杆之间。
本发明的第二伸缩挡板用于截停第一输送机和第一伸缩挡杆之间的收边龙骨,避免收边龙骨在第一伸缩挡杆处堆积,从而导致翻转抓夹爪不便抓取。
进一步地,上述转移机构包括滑轨、与滑轨滑动配合的滑块、顶端与滑块连接的牵引夹爪以及用于驱动滑块的滑动电机,滑轨的两端位于第二输送机和第三输送机的上方,滑动电机和牵引夹爪分别与控制芯片通信连接。
本发明的牵引夹爪用于抓取滞留于堆积挡板处的多组收边龙骨,随滑块移动至第三输送机的上方并下降至合适高度再松开夹爪,可使多组收边龙骨同时输送,便于后续整体包装。
进一步地,上述翻转夹爪和牵引夹爪的材质分别为塑料。
本发明的夹爪为塑料材质,避免在抓取过程中对收边龙骨造成磨损。
进一步地,上述第一输送机靠近所二输送机的端部设有限位挡板。
本发明通过设置限位挡板避免第一输送机上的收边龙骨从第一输送机上移出。
进一步地,上述伸缩推杆、第一伸缩挡杆和第二伸缩挡杆上分别设有传感器。
本发明通过设置传感器便于更精确检测收边龙骨是否就位,避免因收边龙骨不到位造成个组件的生产节拍错乱。
本发明具有以下有益效果:
本发明收边龙骨沿第一输送机进行传送,伸缩推杆定时向外侧伸出,将收边龙骨推入到第二输送机上;第二输送机上的收边龙骨移动至第一伸缩挡杆时,翻转机构开始动作,夹持收边龙骨并对其进行竖直翻转,当下一根收边龙骨抵达第一伸缩挡杆时,翻转机构松开收边龙骨并复位,使两跟收边龙骨呈对合状,第一伸缩挡杆再缩回,使对合后的收边龙骨移动至堆积挡板处,当堆积到一定数量后,再由转移机构一并抓取移动至第三输送机上方进行输出包装,从而解决现有收边龙骨不便扣合及转移包装的问题。
附图说明
图1为本发明收边龙骨转移包装装置的结构示意图;
图2为本发明翻转机构的结构示意图;
图3为本发明翻转机构的侧视图;
图4为本发明转移机构的结构示意图;
图5为扣合后的收边龙骨的截面剖视图;
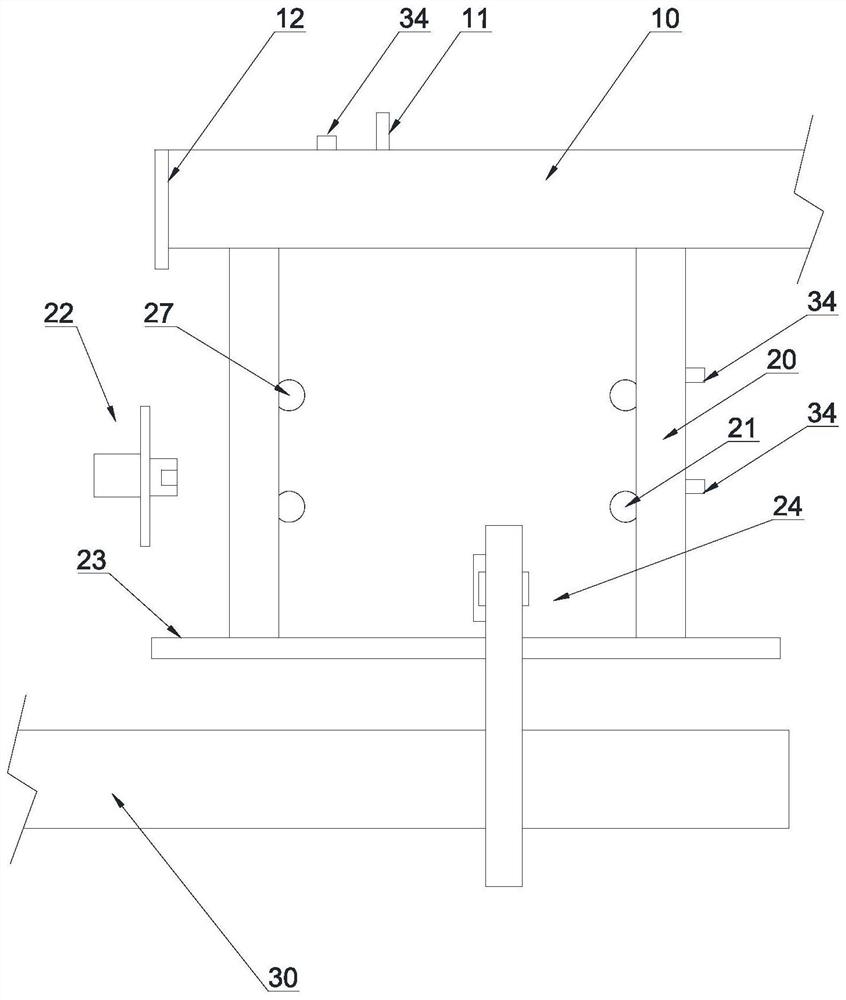
图6为本发明收边龙骨转移包装装置的工装示意图;。
图中:10-第一输送机;11-伸缩推杆;12-限位挡板;20-第二输送机;21-第一伸缩挡杆;22-翻转机构;23-堆积挡板;24-转移机构;25-旋转盘;26-翻转夹爪;27-第二伸缩挡杆;28-滑轨;29-滑块;30-第三输送机;31-牵引夹爪;32-翻转电机;33-滑动电机;34-传感器。
具体实施方式
以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
实施例
参考图1,一种收边龙骨转移包装装置,包括:分别用于输送收边龙骨的第一输送机10、第二输送机20和第三输送机30,以及用于写入联动程序的控制芯片。控制芯片为STM32-F407ZGT6型号的单片机,用于写入设备制造人员编写的控制程序,通过与各组件之间的通信连接进行接收和发送信号,从而实现对各组件的智能控制。
第一输送机10、第二输送机20以及第三输送机30整体呈“Z”字型,第一输送机10的延伸方向与收边龙骨的延伸方向一致。第一输送机10的端部设有限位挡板13,用于对上方的收边龙骨进行限位,避免收边龙骨移动至第一输送机10的端部滑出。在靠近限位挡板13的一侧还设置有伸缩推杆11,伸缩推杆11正常状态下缩回,根据第一输送机10上方的收边龙骨的输送节拍设定为间隔一段时间动作,当伸缩推杆11动作时伸出,并且伸出方向与第一输送机10的延伸方向垂直,从而将第一输送机10上的收边龙骨推至第二输送机20的上方。
参照图1、图2和图3,第二输送机20上设有第一伸缩档杆21,当收边龙骨输送至第一伸缩挡杆21时,第一伸缩杆21用于对第二输送机20上的收边龙骨进行阻挡。第一伸缩档杆21的旁侧设有翻转机构22,翻转机构22包括竖直设置的旋转盘25、设置在旋转盘25上的翻转夹爪26以及用于驱动旋转盘25转动的翻转电机33,翻转电机33和翻转夹爪26分别与控制芯片通信连接。翻转夹爪26为现有装置,用于夹持第一伸缩挡杆21旁的收边龙骨,夹持后翻转电机33带动旋转盘25旋转180°,当下一根收边龙骨抵达第一伸缩挡杆21时,再松开夹持的收边龙骨,使其和第一伸缩挡杆21旁的收边龙骨相扣合,此时第一伸缩挡杆21再向下缩回,扣合好的收边龙骨继续流动。翻转电机33位于旋转盘25远离翻转夹爪26的一面,通过控制芯片的只能控制,使得翻转电机33的转动速率能够满足生产线的生产节拍要求。
在第一输送机10和第一伸缩挡杆21之间还设有第二伸缩挡杆27,第二伸缩挡杆27用于截停第一输送机10和第一伸缩挡杆21之间的收边龙骨,避免收边龙骨在第一伸缩挡杆21处堆积,从而导致翻转抓夹爪26不便抓取。第二输送机20的流出端设置有堆积挡板23,扣合好的收边龙骨移动至堆积挡板23处停止,并堆积到一定数量。在伸缩推杆11、第一伸缩挡杆21和第二伸缩挡杆27上分别设有传感器34,传感器34为光电传感器34,便于更精确检测收边龙骨是否就位,避免因收边龙骨不到位造成个组件的生产节拍错乱传感器34的位置低于第二输送机20上收边龙骨的高度,从而避免对移动中的收边龙骨造成阻挡。第一伸缩挡杆21、第二伸缩挡杆27以及伸缩推杆11均为电动杆,避免气缸驱动造成偶发失效。
参照图1和图4,堆积挡板23的上方设有转移机构24,转移机构24用于将堆积好的多组收边龙骨一并从第二输送机20上转移至第三输送机30上,从而便于多组收边龙骨进行包装。转移机构24包括:滑轨28、与滑轨28滑动配合的滑块29、顶端与滑块29连接的牵引夹爪31以及用于驱动滑块29的滑动电机33,滑轨28的两端分别延伸至第二输送机20和第三输送机30的上方,从而便于在两个输送机之间进行收边龙骨转移。滑动电机33与控制芯片通信连接,可带动滑块29沿滑轨28进行滑动。牵引夹爪31为现有装置,并与控制芯片通信连接,牵引夹爪31的顶端为可伸缩的杆件,方便对夹持住的收边龙骨进行提升和下降,牵引夹爪31底端为可夹紧松开的爪件,用于夹持抓取多组收边龙骨。本发明中的翻转夹爪26和牵引夹爪31的材质分别为塑料,从而避免在抓取过程中对收边龙骨造成磨损。
本发明的操作过程:(1)收边龙骨在第一输送机10上移动至限位挡板12处;(2)伸缩推杆11动作,将第一输送机10上的收边龙骨推出到第二输送机20上;(3)第二输送机20上的收边龙骨移动至第一伸缩挡杆21处停止流动;(4)翻转机构22将第一伸缩档杆21处的收边龙骨夹持并竖直翻转;(5)下一根收边龙骨移动至第一伸缩挡杆21处停止流动,翻转机构22松开夹持住的收边龙骨,使两组收边龙骨呈对合状;(6)翻转机构22复位,第一伸缩挡杆21缩回,对合后的收边龙骨移动至堆积挡板23处停止;(7)堆积挡板23处堆积多组扣合后的收边龙骨,转移机构24将多组收边龙骨同时抓取转移至第三输送机30上;(8)多组收边龙骨沿第三输送机30输出进行包装。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种收边龙骨转移包装装置
- 一种收边龙骨压字的装置