检测装置、机械装置以及作业车辆
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及检测装置、机械装置以及作业车辆。
背景技术
已知有对收容机械部件的壳体的内部空间进行拍摄来推定机械部件的劣化状态的技术。在专利文献1中公开了借助埋设有磁铁的间隔构件来对壳体的内部空间进行拍摄的技术。从机械部件产生的异物由于磁铁的磁力而吸附于间隔构件的端面。拍摄装置借助间隔构件而对吸附于间隔构件的端面的异物进行拍摄。基于由拍摄装置拍摄而得到的图像数据的解析结果来推定机械部件的劣化状态。
现有技术文献
专利文献
专利文献1:国际公开第2017/208373号
发明内容
发明要解决的课题
在埋设于间隔构件的磁铁的体积大的情况下,在间隔构件的端面处磁铁所占的比例变大。其结果是,间隔构件的端面的能够由拍摄装置对异物进行拍摄的范围变小。与此相对,在埋设于间隔构件的磁铁的体积小的情况下,磁铁能够吸附的异物的量变少。
本发明的方案的目的在于,取得用于对机械部件的劣化状态进行推定的适当的图像数据。
用于解决课题的方案
根据本发明的方案,提供一种检测装置,该检测装置具备:拍摄部;第一保持部,其保持所述拍摄部;磁铁,其具有面对供流体流通的流通空间的吸附面,且所述吸附面隔着所述流通空间与所述拍摄部对置;第二保持部,其保持所述磁铁;以及连接部,其与所述第二保持部连接,且具有开口部。
发明效果
根据本发明的方案,能够取得用于对机械部件的劣化状态进行推定的适当的图像数据。
附图说明
图1是从后方观察第一实施方式的作业车辆的一例而得到的立体图。
图2是从后方观察第一实施方式的机械装置的一部分而得到的图。
图3是示出第一实施方式的检测装置的一例的剖视图。
图4是示出由第一实施方式的检测装置取得的图像数据的一例的示意图。
图5是示出第二实施方式的磁铁及第二保持部的俯视图。
图6是示出第二实施方式的磁铁及第二保持部的俯视图。
图7是示出第二实施方式的磁铁及第二保持部的俯视图。
图8是示出第三实施方式的磁铁及第二保持部的剖视图。
图9是示出第三实施方式的磁铁及第二保持部的俯视图。
具体实施方式
以下,参照附图对本发明的实施方式进行说明,但本发明不限定于此。以下说明的实施方式的构成要素能够适当进行组合。另外,还存在不使用一部分的构成要素的情况。
[第一实施方式]
对第一实施方式进行说明。图1是从后方观察本实施方式的作业车辆100的一例而得到的立体图。在本实施方式中,作业车辆100是在矿山的开采现场中装载货物而行驶的自卸车。在以下的说明中,将作业车辆100适当称为自卸车100。
<自卸车>
如图1所示,自卸车100具备车身框架110、支承于车身框架110的卸料主体120、以及对车身框架110进行支承而行驶的行驶装置130。
行驶装置130具有装配轮胎140的车轮150。车轮150包括前轮和后轮150R。后轮150R以旋转轴RX为中心旋转。
在以下的说明中,将旋转轴RX的延伸方向适当称为车宽方向,将自卸车100的行进方向适当称为前后方向,将分别与车宽方向及前后方向正交的方向适当称为上下方向。
前后方向的一方为前方,前方的相反方向为后方。车宽方向的一方为右方,右方的相反方向为左方。上下方向的一方为上方,上方的相反方向为下方。
车身框架110具有作为驱动源的发动机。在本实施方式中,发动机包括柴油发动机那样的内燃机。卸料主体120是装载货物的构件。
行驶装置130具有将由发动机产生的驱动力向后轮150R传递的车轴装置1。由发动机产生的驱动力经由变速器装置而向驱动轴传递。车轴装置1与驱动轴连结。车轴装置1将经由变速器装置及驱动轴而供给的发动机的驱动力向后轮150R传递。后轮150R利用所供给的驱动力以旋转轴RX为中心旋转。由此,行驶装置130行驶。
<车轴装置>
图2是从后方观察本实施方式的车轴装置1的一部分而得到的图。在本实施方式中,车轴装置1是驱动后轮150R的后车轴。车轴装置1是具备桥壳2、以及在桥壳2的内部空间2H收容的机械部件的机械装置。桥壳2经由悬架装置160而支承于车身框架110。桥壳2具有供检测装置配置50的开口20。开口20在桥壳2的后部处设置于车宽方向中央部。
作为收容于桥壳2的机械部件,例示车轴装置1的伞齿轮及小齿轮那样的多个齿轮。作为用于对机械部件进行润滑或冷却的流体的油收容于内部空间2H。机械部件在内部空间2H中被油浸渍一半左右。
<检测装置>
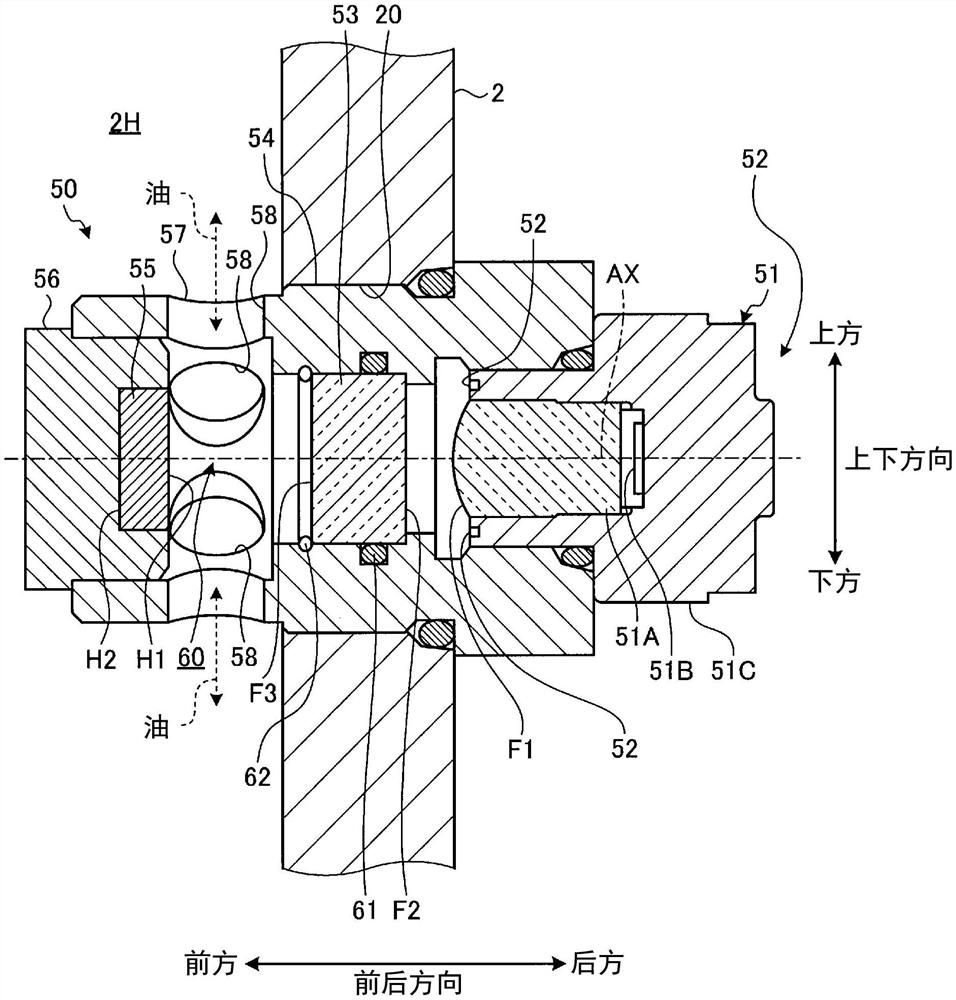
图3是示出本实施方式的检测装置50的一例的剖视图。检测装置50配置于桥壳2的开口20。检测装置50对收容机械部件的桥壳2的内部空间2H进行拍摄而取得在机械部件的劣化状态的推定中使用的图像数据。
检测装置50具备拍摄部51、照明部52、间隔部53、第一保持部54、磁铁55、第二保持部56以及连接部57。
拍摄部51对内部空间2H进行拍摄而取得图像数据。拍摄部51包含数字相机。拍摄部51包含光学系统51A、CCD(Charge Coupled Device)图像传感器或CMOS(ComplementaryMetal Oxide Semiconductor)图像传感器那样的拍摄元件51B、以及收容光学系统51A及拍摄元件51B的相机壳体51C。
照明部52对拍摄部51的拍摄区域进行照明。照明部52配置在光学系统51A的前端面F1的周围。照明部52包括射出照明光的光源。光源埋设于相机壳体51C的前端面。作为光源,例示发光二极管(LED:Light Emitting Diode)。
间隔部53将拍摄部51与油隔开。间隔部53实质上为圆柱状。间隔部53具有与光学系统51A的前端面F1对置的透镜侧端面F2、以及朝向透镜侧端面F2的相反侧的磁铁侧端面F3。间隔部53的磁铁侧端面F3面对供作为流体的油流通的流通空间60。透镜侧端面F2与磁铁侧端面F3平行。前端面F1与透镜侧端面F2隔着间隙对置。需要说明的是,前端面F1与透镜侧端面F2也可以接触。间隔部53是能够使可视光透过的透明构件。在本实施方式中,间隔部53含有聚碳酸酯树脂。聚碳酸酯树脂透明且具有高的耐热性。
第一保持部54对拍摄部51、照明部52、间隔部53以及第二保持部56进行保持。第一保持部54实质上为筒状。第一保持部54配置在拍摄部51、照明部52、间隔部53以及第二保持部56的周围。第一保持部54配置于桥壳2的开口20。在间隔部53的外周面与第一保持部54的内周面之间配置有O型环那样的密封构件61。在间隔部53的磁铁侧端面F3的周围配置有用于固定间隔部53的固定环62。
拍摄部51以光学系统51A的光轴AX沿前后方向延伸的方式保持于第一保持部54。间隔部53以光轴AX分别与透镜侧端面F2及磁铁侧端面F3正交的方式保持于第一保持部54。
第二保持部56对磁铁55进行保持。磁铁55以隔着流通空间60与间隔部53对置的方式保持于第二保持部56。间隔部53配置在拍摄部51与磁铁55之间。磁铁55以隔着流通空间60及间隔部53与拍摄部51对置的方式保持于第二保持部56。
磁铁55例如是钕磁铁。磁铁55捕集存在于内部空间2H的磁性体的异物。磁铁55实质上为圆柱状。磁铁55具有面对供油流通的流通空间60的吸附面H1、以及朝向吸附面H1的相反侧的背面H2。吸附面H1与背面H2平行。磁铁55的吸附面H1与在流通空间60流通的油接触。第二保持部56具有与磁铁55的背面H2以及磁铁55的侧面对置的支承面。磁铁55的吸附面H1隔着流通空间60与拍摄部51对置。间隔部53的磁铁侧端面F3隔着流通空间60与磁铁55的吸附面H1对置。
磁铁55以光轴AX与吸附面H1正交的方式保持于第二保持部56。磁铁55以在与光轴AX正交的面内,光轴AX与磁铁55的吸附面H1的中心一致的方式保持于第二保持部56。
连接部57与第二保持部56连接。在本实施方式中,连接部57包含于第一保持部54。即,第一保持部54和连接部57为一体。需要说明的是,第一保持部54和连接部57也可以为分体。在第一保持部54和连接部57为分体的情况下,连接部57将第一保持部54与第二保持部56连接。连接部57具有开口部58,该开口部58连结于磁铁55的吸附面H1与间隔部53的磁铁侧端面F3之间的流通空间60。流通空间60的外部空间是桥壳2的内部空间2H。内部空间2H的一半左右被油充满。流通空间60包含于内部空间2H。内部空间2H的油能够经由开口部58而流入流通空间60。流通空间60的油能够经由开口部58而流出至内部空间2H。
磁铁55的吸附面H1经由流通空间60被拍摄部51拍摄。拍摄部51经由间隔部53及流通空间60对磁铁55的吸附面H1进行拍摄。拍摄部51能够取得包含磁铁55在内的流通空间60的图像数据。在对磁铁55进行拍摄时,利用照明部52对包含磁铁55在内的流通空间60进行照明。从照明部52射出的照明光经由间隔部53及流通空间60而向磁铁55照射。
磁铁55的吸附面H1的视野区域比光学系统51A的视野区域小。在与光轴AX正交的面内,光轴AX与吸附面H1的中心一致。吸附面H1配置在光学系统51H的视野区域的中心。
<图像数据>
图4是示出由本实施方式的检测装置50取得的图像数据的一例的示意图。作为存在于内部空间2H的异物,例示从机械部件产生的金属粉。在机械部件为齿轮的情况下,若齿轮相互摩擦,则有可能产生磨损粉或破损碎片那样的金属粉。机械部件在内部空间2H内浸渍于油。从机械部件产生的异物混入内部空间2H的油。
内部空间2H的油经由开口部58而流入流通空间60。流入流通空间60的油与磁铁55的吸附面H1接触。吸附面H1为平面且圆形。混入油的异物在为磁性体的情况下,通过磁铁55的磁力而被吸附于吸附面H1。异物通过磁铁55的磁力而被捕集。图4示出大小及形状不同的各种异物被磁铁55捕集的例子。通过利用磁铁55的磁力对混入油的异物进行捕集,从而抑制从机械部件产生的异物侵入配置于内部空间2H的、例如多个齿轮的啮合部、轴承的滑动面。由此,抑制机械部件的不均匀磨损及破损,并抑制车轴装置1的机械部件的劣化。
拍摄部51隔着流通空间60对磁铁55的吸附面H1进行拍摄。磁铁55配置于拍摄部51的光学系统51A的视野区域。拍摄部51能够对吸附于磁铁55的吸附面H1的异物进行拍摄。
由检测装置50取得的图像数据被图像处理。图像数据被图像处理后,对被磁铁55捕集到的异物进行解析。例如,算出被捕集到吸附面H1的异物的量。另外,算出被捕集到吸附面H1的异物的大小。基于异物的解析结果,推定在桥壳2的内部空间2H收容的机械部件的劣化状态。
例如,在被捕集到吸附面H1的异物的量多的情况下,推定为从机械部件产生大量的异物且机械部件的劣化正在进行。在被捕集到吸附面H1的异物的量少的情况下,推定为从机械部件产生的异物为少量且机械部件的劣化未进行。
在被捕集到吸附面H1的异物的大小较大的情况下,推定为机械部件迎来了寿命末期。另外,基于被捕集到吸附面H1的异物的大小,来推定机械部件的不均匀磨损的产生。
在判定为车轴装置1的机械部件迎来了寿命末期的情况下,在车轴装置1的机械部件的寿命终了前,实施车轴装置1的大修。
<效果>
如以上说明的那样,通过在内部空间2H配置磁铁55,从而即使从设置于内部空间2Hd的机械部件产生异物,也会通过磁铁55的磁力将该异物捕集到磁铁55。通过捕集异物,从而抑制异物附着于机械部件。由此,抑制机械部件的劣化。
磁铁55的吸附面H1面对供油流通的流通空间60。吸附面H1隔着流通空间60与拍摄部51对置。拍摄部51经由流通空间60对吸附面H1进行拍摄。拍摄部51能够对吸附有异物的吸附面H1的全部区域进行拍摄。通过增大磁铁55的体积,能够使磁铁55可吸附的异物的量增多。检测装置50能够取得从机械部件产生的异物的适当的图像数据。
另外,通过增大磁铁55的体积,能够使磁铁55可吸附的异物的量增多,因此也可以不频繁地实施从磁铁55去除异物的维护作业。
通过设置间隔部53,从而将拍摄部51与油隔开,并抑制油与拍摄部51的接触。由此,抑制拍摄部51的劣化。另外,能够容易地进行拍摄部51的更换。另外,能够不始终设置拍摄部51而定期地装配拍摄部51来进行拍摄。
在与拍摄部51的光学系统51A的光轴AX正交的面内,光轴AX与磁铁55的吸附面H1的中心一致。由此,吸附面H1配置在光学系统51A的视野区域的中心。因此,检测装置50能够取得从机械部件产生的异物的适当的图像数据。
设置对拍摄部51的拍摄区域进行照明的照明部52。即使桥壳2的内部空间2H变暗,通过照明部52对内部空间2H进行照明,也能够使拍摄部51良好地对内部空间2H进行拍摄。
[第二实施方式]
对第二实施方式进行说明。在以下的说明中,对与上述实施方式相同的构成要素标注相同的附图标记,并简略或省略其说明。
图5是示出本实施方式的磁铁55及第二保持部56的俯视图。如图5所示,检测装置50具备配置在磁铁55的附近并用于对在流通空间60流通的油的状态进行判定的指标部70。
指标部70包含配置在磁铁55的周围的圆环状的板。指标部70的表面与流通空间60的油接触。指标部70具有多个标记M作为油的状态,该多个标记M用于判定油的色调。
指标部70的表面为白色。在白色的表面(基底)由色相与白色不同的耐油性墨描绘标记M。多个标记M分别具有与油相同或近似的色相。多个标记M的色相例如是茶色。
在本实施方式中,在指标部70设置有9个标记M。在本实施方式中,标记M是分别用圆包围“0.5”、“1”、“2”、“3”、“4”、“5”、“6”、“7”、“8”这些数字而成的设计。在以下的说明中,将包含“0.5”的标记M适当称为基准标记M0。将包含“1”的标记M适当称为第一标记M1。将包含“2”的标记M适当称为第二标记M2。将包含“3”的标记M适当称为第三标记M3。将包含“4”的标记M适当称为第四标记M4。将包含“5”的标记M适当称为第五标记M5。将包含“6”的标记M适当称为第六标记M6。将包含“7”的标记M适当称为第七标记M7。将包含“8”的标记M适当称为第八标记M8。
需要说明的是,在本实施方式中,标记M包含数字,但也可以包含字母文字来代替数字。
多个标记M的颜色的浓度不同。在多个标记M中,基准标记M0的浓度最低,接着第一标记M1的浓度比基准标记M0高,接着第二标记M2的浓度比第一标记M1高,接着第三标记M3的浓度比第二标记M2高,接着第四标记M4的浓度比第三标记M3高,接着第五标记M5的浓度比第四标记M4高,接着第六标记M6的浓度比第五标记M5高,接着第七标记M7的浓度比第六标记M6高,第八标记M8的浓度最高。
需要说明的是,多个标记M的亮度也可以不同。例如,也可以是,在多个标记M中,基准标记M0的亮度最高,接着第一标记M1的亮度比基准标记M0低,接着第二标记M2的亮度比第一标记M1低,接着第三标记M3的亮度比第二标记M2低,接着第四标记M4的亮度比第三标记M3低,接着第五标记M5的亮度比第四标记M4低,接着第六标记M6的亮度比第五标记M5低,接着第七标记M7的亮度比第六标记M6低,第八标记M8的亮度最低。
需要说明的是,多个标记M的彩度也可以不同。例如,也可以是,在多个标记M中,基准标记M0的彩度最高,接着第一标记M1的彩度比基准标记M0低,接着第二标记M2的彩度比第一标记M1低,接着第三标记M3的彩度比第二标记M2低,接着第四标记M4的彩度比第三标记M3低,接着第五标记M5的彩度比第四标记M4低,接着第六标记M6的彩度比第五标记M5低,接着第七标记M7的彩度比第六标记M6低,第八标记M8的彩度最低。
标记M与随着油的劣化状态而变化的颜色对应。另外,标记M也可以按照每个油制造商而改变基准。
多个标记M在指标部70的表面隔开间隔地配置。多个标记M分别配置于拍摄部51的光学系统51A的视野区域。
拍摄部51经由流通空间60的油对指标部70进行拍摄。由此,由拍摄部51取得包含标记M在内的指标部70的图像数据。基于由拍摄部51取得的图像数据,来判定收容于内部空间2H的油的状态。在本实施方式中,基于图像数据来判定油的色调是否为阈值以上。关于油的色调的阈值是预先决定的值。油的色调为阈值以上是指油具有高的色调且油的劣化未进行。油的色调小于阈值是指油浑浊且油的色调降低,油的劣化正在进行。
在油的劣化未进行且油的色调高时,即使标记M的浓度(亮度)低,拍摄部51也能够取得该标记M的图像数据。在油的色调高的情况下,拍摄部51能够取得第一标记M1至第八标记M8各自的图像数据。
当油的劣化在进行且油的色调低时,若标记M的浓度(亮度)低,则拍摄部51难以视觉辨认该标记M的图像。在油的色调低的情况下,拍摄部51尽管能够取得第八标记M8的图像数据,但是不能取得基准标记M0至第七标记M7的图像数据。
这样,油的劣化的进行状态与油的色调相关,油的色调与能够取得图像数据的标记M对应。因此,基于由拍摄部51取得的标记M的图像数据来判定油的色调。
如以上说明的那样,根据本实施方式,在磁铁55的周围设置有指标部70。因此,检测装置50能够一并取得被磁铁55捕集到的异物的图像数据和指标部70的图像数据双方。基于被磁铁55捕集到的异物的图像数据来推定机械部件的劣化状态。基于指标部70的图像数据来推定油的劣化状态。这样,在本实施方式中,能够推定机械部件的劣化状态和油的劣化状态双方。
需要说明的是,在图5所示的例子中,指标部70包括在磁铁55的周围配置的圆环状的板。如图6所示,指标部70也可以配置在磁铁55的旁边。在图6所示的例子中,指标部70包括在磁铁55的旁边沿上下方向延伸的板。另外,也可以如图7所示,磁铁55为圆环状,且在磁铁55的内侧配置指标部70。
需要说明的是,指标部70也可以不具有标记M。即,指标部70的表面也可以是无图案。即使当在指标部70的表面未设置标记M的情况下,也能够通过照明部52用多个色光分别对指标部70进行照明,从而基于在指标部70的表面进行反射而得到的反射光来推定油的劣化状态。作为多个色光,例示红色光、蓝色光以及绿色光那样的不同的色光。基于油的色调,各色光的反射率变化。经由新鲜的油(色调高的油)而照射出色光时的各色光的反射率与经由劣化的油(色调低的油)而照射出色光时的各色光的反射率不同。即,根据油的色调,多个色光的反射率特性不同。因此,通过对油照射多个色光并算出多个色光的反射率特性,能够推定油的劣化状态。
[第三实施方式]
对第三实施方式进行说明。在以下的说明中,对与上述实施方式相同的构成要素标注相同的附图标记,并简略或省略其说明。
图8是示出本实施方式的磁铁55及第二保持部56的剖视图。图9是示出本实施方式的磁铁55及第二保持部56的俯视图。在本实施方式中,磁铁55为环状。在磁铁55的内侧设置有锥体部80。锥体部80为圆锥状。需要说明的是,锥体部80也可以是角锥状。
锥体部80为非磁性体。作为锥体部80的材料,也可以使用例如POM(聚缩醛)那样的合成树脂。另外,锥体部80也可以是着色的非磁性体的金属例如铝、不锈钢。
与上述实施方式同样,混入油的异物吸附于磁铁55的吸附面H1。在吸附于吸附面H1的异物的量少的情况下,表示异物在光轴AX的延伸方向上的堆积量的尺寸W小。若吸附于吸附面H1的异物的量增加,则异物在光轴AX的延伸方向上的尺寸W变高。
若异物吸附于磁铁55的吸附面H1且尺寸W变大,则锥体部80的表面逐渐被异物覆盖。若尺寸W变高,则锥体部80的表面的未被异物覆盖的面积逐渐变小。与异物的量的增加相应地,锥体部80的表面的未被异物覆盖的面积变化。根据异物在光轴AX的延伸方向上的尺寸W,与光轴AX正交的面内的、锥体部80的表面的尺寸D变化。
拍摄部51对锥体部80的表面进行拍摄。基于由拍摄部51取得的图像数据来算出尺寸D。如图9(A)所示,判定为尺寸D越大则被捕集到吸附面H1的异物的量(尺寸W)越少。如图9(B)所示,判定为尺寸D越小则被捕集到吸附面H1的异物的量(尺寸W)越多。
如以上说明的那样,在本实施方式中,在环状的磁铁55的内侧设置有锥体部80。基于图像数据而算出尺寸D,由此推定被磁铁55捕集到的异物的量。拍摄部51和磁铁55配置在光轴AX的延伸方向上。因此,有可能难以根据图像数据来确定堆积到吸附面H1的异物的尺寸W。在本实施方式中,在环状的磁铁55的内侧设置有锥体部80,并算出锥体部80的表面中的未被异物覆盖的区域的尺寸D。尺寸D是与光轴AX正交的面内的尺寸。因此,容易根据图像数据来确定尺寸D。
[其他实施方式]
在上述实施方式中,光轴AX与磁铁55的中心一致。但光轴AX与磁铁55的中心也可以错开。
在上述实施方式中,作为具备被油浸渍在壳体的内部空间的机械部件的机械装置,以车轴装置1为例进行了说明。机械装置也可以是变速器装置。变速器装置也是具备被油浸渍在壳体的内部空间的机械部件的机械装置。根据上述实施方式,也能够推定变速器装置的机械部件的劣化状态。
附图标记说明:
1…车轴装置(机械装置),2…桥壳,2H…内部空间,20…开口,50…检测装置,51…拍摄部,51A…光学系统,51B…拍摄元件,51C…相机壳体,52…照明部,53…间隔部,54…第一保持部,55…磁铁,56…第二保持部,57…连接部,58…开口部,60…流通空间,61…密封构件,62…固定环,70…指标部,80…锥体部,100…自卸车(作业车辆),110…车身框架,120…卸料主体,130…行驶装置,140…轮胎,150…车轮,150R…后轮,160…悬架装置,AX…光轴,F1…前端面,F2…透镜侧端面,F3…磁铁侧端面,H1…吸附面,H2…背面,RX…旋转轴。
- 检测装置、机械装置以及作业车辆
- 机具作业姿态检测装置、农业作业机械及贴地作业方法