多路阀以及起重机
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及工程机械领域,具体涉及一种多路阀以及起重机。
背景技术
起重机在一些特殊场作业时,如吊重安装等,要求卷扬系统具有较好的微动控制特性,来调整重物位置以实现精确平稳定位。
相关技术中,负载敏感多路阀通过微动阀芯来实现微动控制。该负载敏感多路阀包括阀体和阀芯,阀芯包括主阀芯和微动阀芯。微动阀芯和主阀芯单独动作。在需要进行微动控制时,只移动微动阀芯的位置,来改变阀口的开度,以实现负载敏感多路阀的小流量流通。
发明人发现,现有技术中至少存在下述问题:该多路阀在先导压力较低时通过微动阀芯先开启输出小流量,在一定范围内可实现多路阀的微动控制。但是微动阀芯的开口面积受到先导油液油压的影响,对操作者的操作技能依然有较高要求,同时多路阀需要增加微动阀芯、微动阀芯孔等零件或工艺,导致成本偏高。
发明内容
本发明提出一种多路阀以及起重机,用以使得多路阀具有稳定的微控操作空间。
本发明实施例提供一种多路阀,包括:
阀体,具有贯穿的通孔、与所述通孔连通的油口;
阀芯,可移动地安装于所述通孔中;
端盖组件,设置于所述阀芯的端部,所述端盖组件设置有安装腔;以及
第一弹性组件,安装于所述安装腔,所述阀芯的端部与所述第一弹性组件抵接;以及
第二弹性组件,也安装于所述安装腔;所述第二弹性组件距离所述阀芯的端部具有设定距离;
其中,当所述阀芯朝着所述第二弹性组件移动所述设定距离后,所述阀芯的端部与所述第一弹性组件和所述第二弹性组件均相互作用。
在一些实施例中,所述端盖组件包括:
第一端盖,具有第一安装腔,所述第一端盖设置于所述阀体的一端,所述第一安装腔与所述通孔连通;以及
第二端盖,具有第二安装腔,所述第二端盖设置于所述阀体的另一端,所述第二安装腔与所述通孔连通;
其中,所述第一安装腔和所述第二安装腔的至少其中一个中同时设置有所述第一弹性组件和所述第二弹性组件。
在一些实施例中,所述第一弹性组件包括:
第一弹簧,一端与所述端盖组件抵接;以及
第一弹簧座,与所述第一弹簧的另一端固定连接,所述阀芯的一端抵接于所述第一弹簧座。
在一些实施例中,所述第二弹性组件包括:
第二弹簧,套设于所述第一弹簧的外部,所述第二弹簧的一端与所述端盖组件抵接;以及
第二弹簧座,与所述第二弹簧的另一端固定连接,所述第二弹簧座抵接于所述阀体;
其中,当所述阀芯朝着所述第二弹性组件移动所述设定距离后,所述第一弹簧座移动至与所述第二弹簧座抵接,此时,所述阀芯通过所第一弹簧座与所述第二弹簧座作用。
在一些实施例中,所述端盖组件设置有先导油路,所述先导油路与所述安装腔连通,以向所述安装腔中通入先导油。
在一些实施例中,所述端盖组件的数量为两个,两个端盖组件分布于所述阀体的两端;每个所述端盖组件都设置有先导油路。
在一些实施例中,所述多路阀包括至少一联换向阀。
在一些实施例中,所述多路阀的至少其中一个所述换向阀被构造为三位七通换向阀。
在一些实施例中,所述油口包括进油口、第一工作油口、第二工作油口、第一供油油口、第二供油油口、节流口和回油口;
其中,当所述多路阀处于中位,各个所述油口均截至;
当所述多路阀处于第一阀位,所述第一工作油口与所述回油口连通,所述第二工作油口与所述第二供油油口连通;所述进油口与所述节流口连通;
当所述多路阀处于第二阀位,所述第一工作油口与所述第一供油油口连通,所述第二工作油口与所述回油油口连通;所述进油口与所述节流口连通。
在一些实施例中,当所述阀芯朝着第一方向移动所述设定距离后,所述第一工作油口与所述第一供油油口导通。
在一些实施例中,当所述阀芯朝着第二方向移动所述设定距离后,所述第二工作油口与所述第二供油油口导通。
在一些实施例中,多路阀还包括:
补偿阀,设置于所述节流口和所述第一供油油口之间,也设置于所述节流口和所述第二供油油口之间。
本发明实施例还提供一种起重机,包括本发明任一技术方案所提供的多路阀。
上述技术方案提供的多路阀,包括阀体、阀芯、端盖组件、第一弹性组件以及第二弹性组件,阀芯处于中位时,阀芯与第一弹性组件抵接;当需要切换多路阀的阀位时,移动阀芯至设定距离,在这个移动过程中,阀芯只推着第一弹性组件形变;当阀芯通过移动设定距离到达设定位置之后,阀芯同时受到第一弹性组件和第二弹性组件的作用,后续再给阀芯施加作用力时,如果该作用力的大小不足以克服第一弹性组件和第二弹性组件总的弹性力,那么即便有该作用力的作用,阀芯也不会进一步移动。只有当作用力的大小足以克服第一弹性组件和第二弹性组件共同的弹性力时,阀芯才会进一步动作。这段作用力虽然增加、但阀芯不移动的区间即是多路阀的微开口控制区间。在此区间内,由于阀芯并不移动,所以阀芯的位置只是使得多路阀的阀口处于微微打开的程度,也就是说油液流量很小。
如果多路阀用于起重机的吊重安装作业,那就表现为吊起件很缓慢地移动,这就为吊重安装的孔对准等作业提供了必要的作业时间。并且,调节第二弹性组件的弹性系数,就能有效控制这段区间的范围。可见上述技术方案,可以有效增大阀芯微开口控制区间,提高多路阀微动控制特性。在阀芯微开口控制区间范围内阀芯位置保持不变,提高操作者便利性。
进一步地,多路阀施加给阀芯的作用力一般通过操纵手柄摆角输出先导控制信号实现控制,即便操作者手柄摆角不稳,先导信号出现波动,也不会导致阀芯开口面积发生变化,那么多路阀的通流量就不会改变,所以使得多路阀所在系统的微动性比较可靠,并且降低了对操作人员的操作水平的要求。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1为本发明实施例提供的多路阀原理示意图;
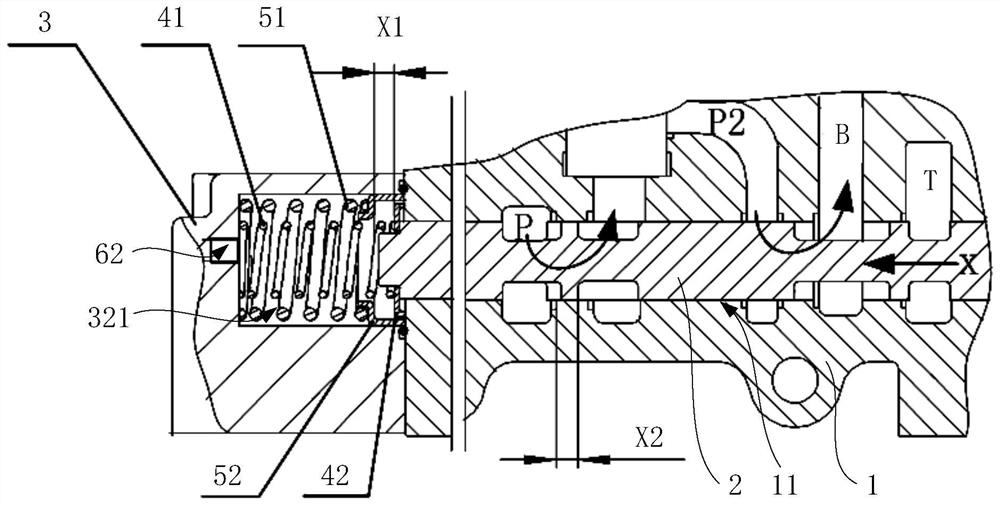
图2为本发明实施例提供的多路阀局部放大示意图;
图3为本发明实施例提供的多路阀的阀芯位移量和先导信号的关系图;
图4为本发明实施例提供的多路阀原理示意图。
具体实施方式
下面结合图1~图4对本发明提供的技术方案进行更为详细的阐述。
多路阀微动控制特性:多路阀微动控制特性与阀芯开口面积有关,是指通过先导信号控制多路阀保持在一定阀芯开口面积,多路阀在该开口面积下,可持续输出最小稳定流量,所以可以驱动执行器(马达、油缸等)平稳运动。多路阀的该特性称之为多路阀微动性。
参见图1和图2,本发明实施例提供一种多路阀,包括阀体1、阀芯2、端盖组件3、第一弹性组件4以及第二弹性组件5。阀体1具有贯穿的通孔11、与通孔11连通的油口。阀芯2可移动地安装于通孔11中。端盖组件3设置于阀芯2的端部,端盖组件3设置有安装腔;第一弹性组件4安装于安装腔,阀芯2的端部与第一弹性组件4抵接;第二弹性组件5也安装于安装腔。第二弹性组件5距离阀芯2的端部具有设定距离。其中,当阀芯2朝着第二弹性组件5移动设定距离后,阀芯2的端部与第一弹性组件4和第二弹性组件5均相互作用,以使得阀芯2后续继续移动时,第一弹性组件4和第二弹性组件5都能跟着阀芯2同步移动。
具体相互作用的方式有多种,直接抵接、间接接触都可以。比如:阀芯2与第一弹性组件4始终保持抵接,当阀芯2推动第一弹性组件4移动一段距离后,第一弹性组件4与第二弹性组件5直接抵接。后续如果阀芯2继续移动,阀芯2会推动第一弹性组件4和第二弹性组件5同步移动。另一些实现方式为:阀芯2与第一弹性组件4始终保持抵接。第二弹性组件5具有可以直接和阀芯2抵接的抵接部,抵接部的位置满足能够和阀芯2在设定位置抵接。当阀芯2从中位刚开始移动时,阀芯2和第二弹性组件5是不接触的,阀芯2移动只带动第一弹性组件4同步移动。当阀芯2推动第一弹性组件4移动一段距离后,阀芯2还和第二弹性组件5的抵接部接触。后续阀芯2再继续移动时,阀芯2会推着第一弹性组件4和第二弹性组件5同步移动。
参见图1和图2,阀体1为块状的,阀体1设置有贯穿自身的通孔以及多个油口。通过阀芯2位置的改变,来改变各个油口之间的连通状态,进而改变多路阀的阀位。
在一些实施例中,多路阀被构造为三位七通换向阀。
参见图1、图2和图4,在一些实施例中,油口包括进油口P、第一工作油口A、第二工作油口B、第一供油油口P1、第二供油油口P2、节流口S和回油口T。其中,当多路阀处于中位,各个油口均截至。当多路阀处于第一阀位(图4所示的上位),第一工作油口A与回油口T连通,第二工作油口B与第二供油油口P2连通;进油口P与节流口连通。当多路阀处于第二阀位(图4所示的下位),第一工作油口A与第一供油油口P1连通,第二工作油口B与回油油口连通;进油口P与节流口S连通。
以图1、图2所示的方向来看,在阀体1的左端和右端都设置有端盖组件3。两个端盖组件3的结构相同。在一些实施例中,端盖组件3包括第一端盖31以及第二端盖32。
参见图1,第一端盖31具有第一安装腔311,第一端盖31设置于阀体1的一端,第一安装腔311与通孔连通。第一端盖31与阀体1固定连接,且第一端盖31抵接在阀体1的外侧。第二端盖32具有第二安装腔321,第二端盖32设置于阀体1的另一端,第二安装腔321与通孔11连通。其中,第一安装腔311和第二安装腔321的至少其中一个中同时设置有第一弹性组件4和第二弹性组件5。
参见图1和图2,端盖组件3设置有先导油路6,先导油路6与安装腔连通,以向安装腔中通入先导油,以控制阀芯2的阀位。
具体来说,第一端盖31的侧壁开设有第一先导油路61,第一先导油路61与第一安装腔311连通。在需要时,通过外部油源,将先导油通入到第一安装腔311中。第二端盖32设置有第二先导油路62,第二先导油路62与安装腔连通,以向第二安装腔321中通入先导油。
第一安装腔311和第二安装腔321位于阀体1的两端,以图1和图2所示的方向作为参照,如果从第一先导油路61供油,阀芯2左移;如果从第二先导油路62供油,阀芯2右移。阀芯2移动的数值,与两侧第一弹性组件4、第二弹性组件5对阀芯2施加的总作用力相关。
继续参见图1和图2,在一些实施例中,第一弹性组件4包括第一弹簧41以及第一弹簧座42。第一弹簧41一端与端盖组件3抵接;第一弹簧座42与第一弹簧41的另一端固定连接,阀芯2的一端抵接于第一弹簧座42。
如果阀芯2有位移,则第一弹簧座42和第一弹簧41都会跟着移动。但是,第二弹性组件5则不一定有位移。只有当阀芯2移动至与第二弹簧51组件能够相互作用时,第二弹性组件5才能随着阀芯2的移动而移动。
继续参见图1和图2,在一些实施例中,第二弹性组件5包括第二弹簧51以及第二弹簧座52。第二弹簧51套设于第一弹簧41的外部,第二弹簧51的一端与端盖组件3抵接。第二弹簧座52与第二弹簧51的另一端固定连接,第二弹簧座52抵接于阀体1。其中,当阀芯2朝着第二弹性组件5移动设定距离后,第一弹簧座42移动至与第二弹簧座52抵接,此时,阀芯2通过所第一弹簧座42与第二弹簧座52作用。
参见图1和图2,当阀芯2朝着第一方向(比如图1所示的左边)移动设定距离后,第一工作油口A与第一供油油口P1导通。
参见图1和图2,当阀芯2朝着第二方向(比如图1所示的右边)移动设定距离后,第二工作油口B与第二供油油口P2导通。第一方向、第二方向相反。
上述技术方案,通过改变第二弹性组件5的弹性系数,有效改变阀芯微开口控制区间,提高多路阀微动控制特性:多路阀采用双弹簧限位结构,分别利用阀芯微开口位置时第一弹簧41和第二弹簧51的压缩力,将控制阀芯2在微开口位置的先导信号设置成一个区间,在此区间范围内,先导信号的变化对阀芯2位移无影响,提高多路阀的微动控制特性。因为先导信号是克服阀芯2弹簧的压缩力推动阀芯2运动的,因此先导信号与阀芯2位移正相关,本发明实施例采用双弹簧结构,先导信号克服第一个弹簧压缩力推动阀芯2运动X1位移时与第二弹簧座52接触,此时弹簧力包括第一弹簧41压缩力和第二弹簧51预紧力,先导信号线性增加过程中,存在K1~K2的区间阀芯2是不移动的,该区间即为定义的微开口控制区间。
并且,由于第一弹性组件4和第二弹性组件5的总弹性力大于第一弹性组件4的弹性力,操作人员通过作用力的突变可以快速找到阀芯微开口位置,减小操纵技能影响,提高操作者便利性。并且,阀芯2具有较大的微开口控制区间,在该微开口控制区间内,执行部件保持最小速度运动,即便控制信号出现变化,多路阀的流量不变,所以不会变化灵敏;上述的微开口控制区间,可快速控制先导信号在控制区间范围内,且在微开口控制区间范围内,阀芯2位置不受先导信号变化的影响,提高操作便利性。
在一些实施例中,路阀包括至少一联换向阀。当多路阀包括两联或者两联以上的换向阀时,在一些实施例中,多路阀还包括补偿阀7,补偿阀7设置于节流口S和第一供油油口P1之间,也设置于节流口S和第二供油油口P2之间。在两联或者以上换向阀同时换向动作时,补偿阀7可根据最高负载压力Ls调节阀芯节流口S前后压差保持恒定,保证通过阀芯的节流口S的流量仅与节流口S开口面积有关,与节流口S前后压差无关,防止流量只流向负载压力较低的一联。在多联换向阀复合动作时,补偿阀7起到补偿作用。
参见图1和图2,下面介绍一些具体的实现方式。
多路阀包括阀体1、阀芯2、端盖组件3、第一弹簧41、第二弹簧51、第一弹簧座42、第二弹簧座52和补偿阀7等。阀芯2换向采用双弹簧限位结构,采用先导信号驱动阀芯2移动,以克服第一弹簧41压缩力。阀芯2继续移动的过程中,推着第一弹簧座42同步移动;当第一弹簧座42移动至与第二弹簧座52接触时,该位置为设定的阀芯微开口位置。当阀芯2移动至该位置后,多路阀的换向操作已经完成了一部分,即多路阀处于图4所示的第一阀位、第二阀位中的其中一个。图1和图2所示意的是多路阀处于图4所示的下阀位的情形。只是,多路阀此时的阀口开度小,经过多路阀的液体流通量小。在该位置,阀芯2会保持不动,先导力直至施加给阀芯2的作用力可以克服第一弹性组件4和第二弹性组件5的总作用力。参见图3,先导力的这段区间为K1~K2,这段区间也称为阀芯微开口控制区间。阀芯微开口控制区间内,先导信号对应的先导力范围为F1~F2。F1为阀芯微开口位置时的第一弹簧41的压缩力,F2为第一弹簧41的压缩力和第二弹簧51的预紧力之和。在此先导信号控制区间范围内,阀芯2保持在微开口位置,不再移动。
第一弹簧41的一侧通过第一弹簧座42与阀芯2接触,另一侧与端盖组件3接触。阀芯2设于阀体1的阀孔内,并利用两侧第一弹簧41的预紧力保持中位。第二弹簧51的外径大于第一弹簧41,第二弹簧51设于第一弹簧41外部。第二弹簧51的一侧通过第二弹簧座52与阀体1接触,另一侧与端盖组件3接触,并设置一定的预紧力。
先导信号通过控制一侧端盖组件3内的先导力驱动阀芯2克服第一弹簧41的压缩力向一侧移动。当第一弹簧座42与第二弹簧座52接触时,阀芯2处于设置的微开口位置。此时第二弹簧51的预紧力和第一弹簧41的压缩力之和大于阀芯2的先导力,阀芯2停止移动,直至先导力增大至第二弹簧51的预紧力和第一弹簧41的压缩力之和。在此范围内,阀芯2保持微开口位置不变。
参见图4,多路阀包括进油口P、第一供油油口P1、第二供油油口P2、第一工作油口A、第二工作油口B和回油口T。进油口P、第一供油油口P1和第二供油油口P2中通入的都是高压油。在多路阀处于中位时,进油口P通过阀芯2遮盖X2的距离,以使得进油口P与第一高压油路P1和第二高压油路P2隔开;此时,第一工作油口A和第二工作油口B均无油源。
结合图1和图2所示,以多路阀阀芯2向图示左侧运动为例说明多路阀微动控制过程:
通过先导信号K控制图示右侧第一端盖31内的先导力逐渐增大,驱动阀芯2向图示左侧移动时,阀芯2推动位于左侧的第一端盖32内的第一弹簧座42克服第一弹簧41压缩力向图示左侧移动。当阀芯2位移超过遮盖X2时,高压油路P内的高压油源通过阀芯2节流口S流出,并经补偿阀7流向第一高压油路P1和第二高压油路P2,补偿阀7保证了高压油路P经阀芯2节流口S流出的流量仅与阀芯2开口面积有关,与压差无关。此时P2-B通,A-T通,高压油液再经第二高压油路P2流向第二工作油口B对应的执行元件,执行元件的回油通过第一工作油口A流向多路阀的回油口T。
随着先导信号K的持续增大并驱动阀芯2推动第一弹簧座42移动至与第二弹簧座52接触时,第一弹簧座42和第二弹簧座52的距离X1为设置的阀芯微开口位置,X1>X2,此时第一弹簧41的压缩力即对应先导信号K1。由于第一弹簧41的压缩力和第二弹簧51的预紧力之和大于先导信号K1对应的先导力,阀芯2停止移动并保持微开口位置,阀芯2先导力在第一弹簧41压缩力至第一弹簧41压缩力与第二弹簧51预紧力之和范围内,阀芯2位移保持不变,阀芯2节流槽可稳定输出最小流量。在此先导力区间,为阀芯微开口控制区间,先导信号和阀芯2位移关系如图3所示,当阀芯2先导信号继续增大至大于K2时,阀芯2继续向图3所示左侧移动,阀芯2开口不断增加,实现阀芯2大流量控制。
多路阀阀芯2向图示右侧运动过程和上述左侧运动过程原理相同。
本发明实施例还提供一种起重机,包括本发明任一技术方案所提供的多路阀。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为便于描述本发明和简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本发明保护内容的限制。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,但这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 比例多路阀的控制阀、控制联、比例多路阀和起重机
- 比例多路阀的控制阀、控制联、比例多路阀和起重机