测距装置以及测距方法
文献发布时间:2023-06-19 12:16:29
相关申请的交叉引用
本申请享有以日本专利申请2020-23336号(申请日为2020年2月14日)为基础的优先权。本申请通过参考该基础申请而包含基础申请的全部内容。
技术领域
实施方式涉及测距装置以及测距方法。
背景技术
近年来,在很多汽车中采用了无钥匙进入系统,该无钥匙进入系统使车的上锁或开锁变得容易。根据该技术,汽车用户可以利用汽车钥匙与汽车之间的通信来进行上锁或开锁。进而,近些年,智能钥匙系统也在广泛地普及,在该智能钥匙系统下,用户不接触钥匙就能够将门上锁或开锁,或者使发动机启动。
另一方面,攻击者入侵钥匙和汽车间的通信而盗窃车辆或车内物品的事件多发。作为对该攻击、即所谓的中继攻击的防御措施,已研究出了如下方法,该方法为,测量钥匙和汽车间的距离,能在判断为距离在规定的距离以上时,低成本地禁止门的解锁等。例如,为了判断有无所谓的中继攻击,在钥匙和汽车间收发用于测量钥匙和汽车间的距离的多个载波信号。
但是,关于像钥匙和汽车间的载波信号也被中继的这种中继攻击的情况并没有被考虑到。
发明内容
实施方式提供一种能够判断有无载波信号的中继的测距装置及测距方法。
实施方式的测距装置基于载波相位检测,计算第一装置和第二装置间的距离,该测距装置中具有:距离计算部,基于从所述第一装置和所述第二装置分别发送的第一测距信号和第二测距信号中所包含的多个载波信号的相位,计算所述距离;接收信号强度测量部,对所述多个载波的至少一部分载波的接收信号强度进行测量;以及有无载波信号中继判断部,基于距离信息和接收信号强度信息,判断有无所述载波信号的中继,所述距离信息关于所述距离计算部中计算出的多个所述距离,所述接收信号强度信息关于所述接收信号强度测量部中测量出的多个所述接收信号强度。
附图说明
图1是包含实施方式涉及的测距装置的无线通信系统的结构图。
图2是用于说明适用实施方式涉及的无线通信系统的智能钥匙系统的结构图。
图3是用于说明实施方式涉及的持有钥匙的用户靠近了汽车附近时的认证和测距的情况的图。
图4是示出实施方式涉及的在汽车的装置与钥匙的装置之间进行的无线信号的收发顺序的图。
图5是实施方式涉及的测距装置的结构图。
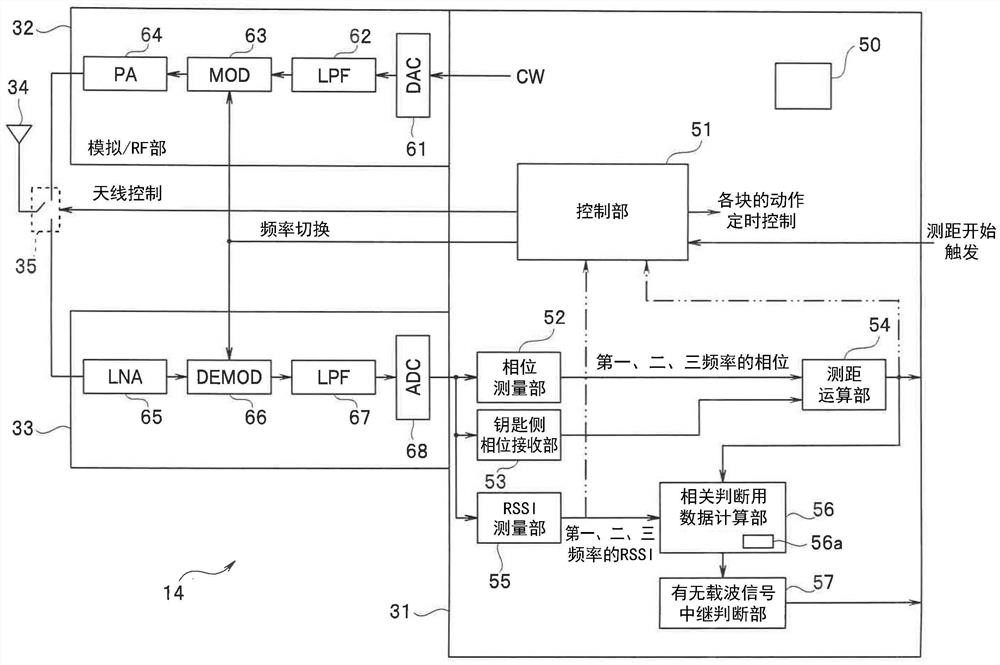
图6是实施方式涉及的搭载于汽车中的装置的测距部的电路图。
图7是实施方式涉及的搭载于钥匙中的装置的测距部的电路图。
图8是示出实施方式涉及的汽车的测距部的数字部的处理流程的流程图。
图9是用于说明实施方式涉及的设置于汽车中的天线以及持有钥匙的用户向汽车接近的多个接近路径的例子的图。
图10是示出实施方式涉及的没有进行载波信号的中继而在LF区域内进行了多次测距时的三个载波信号的接收信号强度(RSSI)和测距值的变化的图表。
图11是示出实施方式涉及的、基于实验结果的、关于在多个定时下测量的多个RSSI的方差与关于在多个定时下计算出的多个测距值的方差之间的相关的图表。
图12是示出实施方式涉及的、使载波信号的相位随机变化的多个载波信号被中继的中继攻击中的3个接收信号强度(RSSI)和测距值的变化的例子的图表。
图13是示出实施方式涉及的、进行了发送相位随机变化的多个载波信号的中继攻击的情况下的、关于多个接收信号强度(RSSI)的方差与关于多个测距值的方差之间的相关的图表。
图14是用于说明实施方式涉及的关于测量出的多个接收信号强度(RSSI)的方差与关于多个测距值的方差之间有无相关的判断方法的例子的图。
图15是用于说明实施方式涉及的测量出的多个接收信号强度(RSSI)的方差与多个测距值的方差之间有无相关的判断方法的其他例子的图。
具体实施方式
以下,参照附图,对实施方式进行说明。
(构成)
图1是包含本实施方式涉及的测距装置的无线通信系统的结构图。图2是用于说明适用本实施方式涉及的无线通信系统的智能钥匙系统的结构图。装置1和装置2的至少一方能够自由移动。
如图1所示,装置1具有处理器11、LF发送部12、RF接收部13和测距部14。装置2具有处理器21、LF接收部22、RF发送部23和测距部24。
智能钥匙系统100具有汽车C和钥匙K而构成,所述钥匙K用于汽车C的门的上锁或开锁、以及发动机的启动。更详细地说,智能钥匙系统100在搭载于汽车C中的装置1和内置在钥匙K中的装置2之间按照规定的协议进行无线通信,当在汽车中正确地认证了钥匙K时,使门的上锁等成为可能。如后所述,在智能钥匙系统100中,基于载波相位检测,计算装置1和装置2间的距离,并判断出该距离是规定的距离内。
当用户进入LF区域(图3)内时,进行认证,LF区域是能够接收搭载于汽车C的装置1的LF(Low Frequency:低频)信号的区域。LF信号为信标信号,例如是130KHz频带的电波信号。内置在钥匙K中的装置2接收信标信号时,发送识别码信息,装置1基于接收到的识别码信息进行认证。在用于认证的识别码信息的发送中使用UHF频带、例如300MHz频带的电波信号。认证后进行装置1和装置2间的测距。
图3是用于说明持有钥匙K的用户U靠近汽车C附近时的认证和测距的情况的图。图3中用虚线示出的范围表示LF区域。LF区域是信标信号达到的范围,例如是距离汽车C的侧面中心1.5m至2m内的区域。用户U持有的装置2进入LF区域内时,在认证后多次进行用于在装置1和装置2间测距的2个以上的载波信号的收发,并进行多次、在此为规定次数的测距。各载波信号是无调制连续波(CW)。载波信号是亚千兆赫频带、例如920MHz频带的无线信号。
图4是示出在汽车C的装置1与钥匙K的装置2之间进行的无线信号的收发顺序的图。
装置1总是从LF发送部12发送信标信号。由于信标信号是只到达LF区域内的信号,因此,装置2的LF接收部22仅在位于LF区域内时能够接收信标信号。
装置2在根据信标信号的接收而从RF(Radio Frequency:射频)发送部23发送了识别码信息的同时,变成规定的待机状态。当装置1的RF接收部13接收了识别码信息时,处理器11基于接收到的识别码信息进行认证。处理器11在基于接收到的识别码信息而正确地完成了认证时,控制测距部14发送规定频率的多个载波信号作为第一测距信号,接着,根据从装置1的第一测距信号的接收,从装置2也发送规定频率的多个载波信号,作为第二测距信号。根据来自装置1的多个载波信号的多个相位和来自装置2的多个载波信号的多个相位,对装置1和装置2间的距离进行测量。
即,装置1的测距部14发送第一测距信号的多个第一载波信号,装置2的测距部24发送第二测距信号的多个第二载波信号。测距部14检测多个第二载波信号各自的相位,测距部24检测多个第一载波信号各自的相位,并将关于检测出的各第一载波信号的相位的相位信息发送给测距部14。并且,后述的距离计算部54设置于测距部14中,基于检测出的各第二载波信号的相位和接收到的相位信息计算距离。
例如利用日本特开2018-155724号公报中公开的方法来进行装置1和装置2间的距离的测量。基于在装置1和装置2的各自装置中计算出的各载波信号的相位,计算装置1和装置2间的距离。根据日本特开2018-155724号公报中公开的方法,装置1发送2个以上(在此为2个)载波信号作为第一测距信号,装置2发送2个以上(在此为2个)载波信号作为第二测距信号。装置2对接收到的第一测距信号的2个载波信号的相位差进行检测,并将相位差的信息发送给装置1。装置1对接收到的第二测距信号的2个载波信号的相位进行检测,并计算2个载波信号的相位差。装置1根据在装置1中检测出的相位差和从装置2接收的相位差信息,通过规定的运算计算出装置1和装置2间的距离。
再有,如后所述,在本实施方式中使用互不相同的频率f1、f2、f3这3个载波信号。在装置1和2之间收发3个载波信号,并使用3个载波信号中的2个载波信号进行测距运算。
再进一步地,在本实施方式中,装置2将接收到的2个载波信号各自的相位的信息发送给装置1,在装置1中根据从装置2接收的2个相位的信息计算相位差。
装置1能够基于计算出的装置1和装置2间的距离(以下称为测距值)Rm进行有无中继攻击的判断。
而且,在本实施方式中也考虑来自钥匙K的装置2的多个载波信号被中继的情况,而进行多次、在此为规定次数的测距,并进行载波信号是否被中继的判断。具体地,为了进行多次测距,装置1在认证后与装置2之间多次进行测距信号的收发,装置2根据从装置1的第一测距信号的接收,进行第二测距信号的发送。装置1对各测距时的来自装置2的各第二测距信号的各载波信号的接收信号强度(以下简称为RSSI)进行测量,并基于关于RSSI的值(以下简称为RSSI)的方差和关于计算出的测距值Rm的方差,判断载波信号是否被中继。
即,在本实施方式中进行规定次数的测距,并基于关于作为多个测距结果的测距值Rm的方差和关于多个RSSI的方差之间的相关,判断是否进行了载波信号的中继。后述的有无载波信号中继判断部57根据该相关的有无,将有无载波信号的中继的有无信号输出给处理器11。
以后叙述关于作为多个测距结果的测距值Rm的方差和关于多个RSSI的方差之间的相关。
装置1的处理器11包括中央处理装置(以下称为CPU)、ROM、RAM等,在ROM中储存有对LF发送部12、RF接收部13和测距部14的动作进行控制的程序。处理器11还使测距部14对接收到的2个载波信号的相位的相位差进行运算。此外,测距部14还使用该相位差和从装置2接收的相位信息中所包含的相位差,计算测距值Rm。
如上所述地将对装置1和2间的距离进行测量的测距进行规定次数。装置1的处理器11基于规定次数的测距结果以及有无由上述载波信号的中继引起的中继攻击的判断结果,判断是否输出门开锁的许可信号。
装置2的处理器21包括CPU、ROM、RAM等,在ROM中储存对LF接收部22、RF发送部23和测距部24的动作进行控制的程序。处理器21还在测距部24中对接收到的各载波信号的相位进行测量,并将测量出的各相位的相位信息发送给装置1。
从装置2到装置1的相位信息的发送利用下述方法进行:使用装置2的测距部14,用规定的调制方式对相位信息的数据进行调制,并发送给装置1等。
再有,在此,处理器11、21具有用于使其执行实现各功能的软件程序的CPU和ROM等而构成,但也可以由半导体装置、FPGA(Field Programmable Gate Array:现场可编程门阵列)等电子电路构成,由电路等实现各功能。
图5是实施方式涉及的测距装置的结构图。测距装置200包括测距部14和24而构成,基于载波相位检测,计算装置1和装置2间的距离。测距部14包含在装置1中,包括数字部31、发送部32、接收部33、天线34和天线开关35。数字部31、发送部32、接收部33和天线开关35构成为1个或2个以上的半导体装置。测距部24包含在装置2中,包括数字部41、发送部42、接收部43、天线44和天线开关45。数字部41、发送部42、接收部43和天线开关45构成为1个或2个以上的半导体装置。
装置1的数字部31按照来自处理器11的控制信号,对发送部32、接收部33和天线开关35进行控制。装置2的数字部41按照来自处理器21的控制信号,对发送部42、接收部43和天线开关45进行控制。
图6是装置1的测距部14的电路图。数字部31例如由半导体装置上的数字电路构成。数字部31包括基准振荡器50、控制部51、相位测量部52、钥匙侧相位接收部53、测距运算部54、RSSI测量部55、相关判断用数据计算部56和有无载波信号中继判断部57。
基准振荡器50是生成测距部14内的动作的基本时钟信号的基准信号源。控制部51在接收了来自处理器11的成为测距开始触发的指令信号(以下称为测距开始触发信号)时,控制相位测量部52等各块的动作定时,以进行规定的测距顺序的动作。
相位测量部52对来自装置2的各载波信号的相位进行测量。相位测量部52是对接收部33接收到的来自装置2的3个载波信号的相位进行测量的电路。即,相位测量部52对接收到的3个第二载波信号各自的相位进行测量。在相位测量部52中得到的3个载波信号的相位的信息被提供给测距运算部54。
钥匙侧相位接收部53是对从装置2接收到的、在装置2中测量出的3个载波信号的相位信息进行接收的电路。
测距运算部54使用在装置1中接收到的频率f1、f2、f3内的2个载波信号的相位、以及从装置2接收的相位信息(频率f1、f2、f3内的2个载波信号的相位),计算装置1和装置2间的距离。即,测距运算部54基于从装置1和装置2分别发送的第一测距信号和第二测距信号中所包含的多个载波信号的相位,计算装置1和装置2间的距离。
测距运算部54使用不同的2个频率的2个载波信号的相位差进行测距。即,测距运算部54使用测距部14接收的2个载波信号的相位差和测距部24接收的2个载波信号的相位差来计算距离。
再有,也可以根据从装置2接收到的3个载波信号的相位和来自装置2的3个载波信号的相位信息,计算3个距离,将3个距离值的平均值作为装置1和2间的距离。
RSSI测量部55根据接收到的3个载波信号的接收功率,测量3个接收信号强度(RSSI)。即,RSSI测量部55测量多个载波中的至少一部分载波的接收信号强度(RSSI)。
相关判断用数据计算部56是对用于判断关于测距值Rm的方差和关于多个RSSI的方差之间有无相关的各种数据进行计算的电路。相关判断用数据计算部56具有储存数据的寄存器即存储部56a。关于相关判断用数据计算部56的处理以后叙述。
有无载波信号中继判断部57是使用在相关判断用数据计算部56中得到的各种数据判断有无中继了载波信号的中继攻击的电路。在本实施方式中,有无载波信号中继判断部57基于关于测距运算部54计算出的多个距离的距离信息、以及关于接收信号强度测量部55测量出的多个RSSI的接收信号强度信息,判断有无载波信号的中继。更具体地,有无载波信号中继判断部57基于关于计算出的多个距离的方差和关于多个RSSI的方差,判断有无载波信号的中继。有无载波信号中继判断部57的判断结果被输出给处理器11。
数字部31生成基于基准振荡器50的无调制信号(CW)的数据,并输出给发送部32。
下面对发送部32进行说明。发送部32是包含数字模拟切换器(以下简称为DAC)61、低通滤波器(以下简称为LPF)62、调制器(MOD)63和放大器64的模拟电路。
DAC 61从数字部31接收用于连续波(CW)的数字数据,并转换成模拟信号。因而,数字部31生成用于连续波(CW)的数字数据。
DAC 61的模拟信号通过LPF 62输入到调制器63。调制器63按照来自控制部51的频率切换信号,对LPF 62的输出信号进行频率调制。在此,来自LPF 62的模拟信号被调制成上述频率、f1、f2、f3频率中的某个频率。即,调制器63按照来自控制部51的频率切换信号对输入信号进行调制,生成频率f1、f2、f3中的某一个频率的信号。
放大器64是功率放大器(PA),将调制器63的输出信号放大后,经由天线开关35提供给天线34。天线开关35按照来自控制部51的天线控制信号进行动作,使得天线34与发送部32或者接收部33连接。
下面对接收部33进行说明。接收部33是包含低噪声放大器(以下简称为LNA)65、解调器(DEMOD)66、LPF 67和模拟数字切换器(以下简称为ADC)68的模拟电路。
LNA 65对经由天线开关35接收到的来自天线34的接收信号进行放大,并输出给解调器66。解调器66按照来自控制部51的频率切换信号,将LNA 65的输出信号解调并输出基带信号。
解调器66的输出信号通过LPF 67提供给ADC 68。ADC 68将LPF 67的输出信号转换成数字信号并输出给数字部31。
如以上所述地,发送部32和接收部33构成第一收发器,其中,使用基准振荡器50的输出发送频率互不相同的3个(f1、f2、f3)载波信号,并且从装置2接收频率与3个载波信号相同的3个载波信号。
图7是装置2的测距部24的电路图。数字部41例如由半导体装置上的数字电路构成。数字部41包括基准振荡器70、控制部71、相位测量部72、储存部73、接收信号检测部74、调制部75和选择器76。
基准振荡器70是生成测距部24内的动作的基本时钟信号的基准信号源。基准振荡器70与装置1的基准振荡器50独立地进行动作。控制部71在接收了来自处理器21的测距开始触发信号时,控制相位测量部72等各块的动作定时,以进行规定的测距顺序的动作。处理器21在发送了识别码信息后,向测距部24的控制部71输出测距开始触发信号。
相位测量部72测量来自装置1的各载波信号的相位。测量出的各载波信号的相位的信息被储存在储存部73中。即,相位测量部72对接收到的3个载波信号的各自的相位进行测量。
储存部73是如上所述地储存各载波信号的相位的信息的寄存器。
接收信号检测部74检测来自装置1的最初的载波信号的接收。接收信号检测部74在接收了最初的载波信号时,向控制部71通知接收到最初的载波信号这一情况。
调制部75将相位测量部72测量出的各载波信号的相位信息调制成用于发送的信号。在此,相位信息被调制成与信息的数字数据相对应的IQ信号。即,测距部24测量出的相位信息被发送给装置1的测距部14。
选择器76按照来自控制部71的数据选择信号,选择基于基准振荡器70的连续波(CW)的数据或者调制部75的输出信号,并输出到发送部42。
控制部71在从处理器21接收了距离开始触发信号时,成为等待来自汽车C的装置1的载波信号的待机状态。
因而,数字部81生成用于连续波(CW)的数字数据,并输出给发送部42。
下面对发送部42进行说明。发送部42是包含DAC 81、LPF 82、调制器(MOD)83和放大器84的模拟电路。
DAC 81从数字部41接收用于连续波(CW)的数字数据,并切换成模拟信号。
DAC 81的模拟信号通过LPF 82输入到调制器83。调制器83按照来自控制部71的频率切换信号,对LPF 82的输出信号进行频率调制。在此,来自LPF 82的模拟信号被调制成上述频率、f1、f3、f4频率中的某个频率。即,调制器83按照来自控制部71的频率切换信号对输入信号进行调制,并生成频率f1、f2、f3中的某一个频率的信号。
放大器84是功率放大器(PA),将调制器84的输出信号放大后,经由天线开关45提供给天线44。天线开关45按照来自控制部71的天线控制信号进行动作,使得天线44与发送部42或者接收部44连接。
下面对接收部43进行说明。接收部43是包含LNA 85、解调器(DEMOD)86、LPF 87和ADC 88的模拟电路。
LNA85对经由天线开关45接收到的来自天线44的接收信号进行放大,并输出给解调器86。解调器86按照来自控制部71的频率切换信号,将LNA85的输出信号解调并输出基带信号。
解调器86的输出信号通过LPF 87提供给ADC 88。ADC 88将LPF 87的输出信号转换成数字信号并输出给数字部41。
如以上所述地,发送部42和接收部43构成第二收发器,其中,使用基准振荡器70的输出发送3个第二载波信号,并且从装置1接收3个载波信号。
(作用)
下面,对测距处理的流程进行说明。
图8是示出汽车C的测距部14的数字部31的处理流程的流程图。图8示出在测距部14中进行测距和有无中继攻击的判断时的处理流程。有无中继攻击的判断包括基于测距结果的有无中继攻击的判断和有无载波信号的中继的判断。
如上所述地,汽车C的处理器11接收来自钥匙K的装置2的识别码信息,并在对接收到的识别码信息正确地进行了认证时,控制测距部14执行测距处理。
处理器11控制测距部14的控制部51,在装置1和2间进行多个载波信号的收发并进行测距处理(步骤(以下略作S)1)。
具体地,首先,控制部51控制发送部32发送频率f1的载波信号。装置2在控制部71的控制下,在接收了来自装置1的载波信号时,控制发送部42发送频率f1的载波信号,并且将从装置1接收到的频率f1的载波信号的相位信息发送给装置1。
接着,控制部51控制发送部32发送第二频率f2的载波信号。装置2在控制部71的控制下,在接收了来自装置1的频率f2的载波信号时,控制发送部42发送频率f2的载波信号,并且将从装置1接收到的频率f2的载波信号的相位信息发送给装置1。
进一步地,控制部51控制发送部32发送第三频率f3的载波信号。装置2在控制部71的控制下,在接收了来自装置1的频率f3的载波信号时,控制发送部42发送频率f3的载波信号,并且将从装置1接收到的频率f3的载波信号的相位信息发送给装置1。
此外,装置1的RSSI测量部55由于在接收了来自装置2的载波信号时测量RSSI,因此保持有所测量的各RSSI的数据。
测距运算部54使用来自相位测量部52的相位信息和来自钥匙侧相位接收部53的相位信息,计算在装置1中接收的3个载波信号内的2个载波信号的相位的相位差、以及从装置2接收的3个载波信号内的2个载波信号的相位的相位差,并根据计算出的2个相位差之和,计算装置1和装置2间的距离。
控制部51将测距运算部54的测距结果传送给相关判断用数据计算部56而保存在存储部56a中(S2),将RSSI测量部55的3个载波信号的每个频率的RSSI传送给相关判断用数据计算部56而保存在存储部56a中(S3)。
在1次的测距处理中执行S1至S3的处理。在S3之后,控制部51判断是否已执行了规定次数的测距处理(S4)。
在还未执行规定次数的测距处理时(S4:否),处理返回到S1,执行S1至S3的处理。
当执行了规定次数的测距处理时(S4:是),控制部51控制相关判断用数据计算部56执行测距结果和RSSI的统计处理(S5)。S5的处理在相关判断用数据计算部56中执行。具体地,计算出关于存储部56a中存储的测距结果即多个测距值Rm的方差、以及关于存储部56a中存储的多个RSSI的方差,并使用这些方差进行制作数据的统计处理,该数据用于判断关于多个测距值Rm的方差和关于多个RSSI的方差之间是否存在相关关系。
在此,对关于测距值Rm的方差和关于RSSI的方差之间的相关进行说明。
图9是用于说明设置于汽车C中的天线34以及持有钥匙K的用户U向汽车C接近的多个接近路径的例子的图。图9示出了驾驶座位于右侧,用户U向着汽车C的右侧门DR附近的位置P接近的情况。天线34设置于车内的前方左侧。图9示出在汽车C的前后方向上距离位置P前方3m、后方3m和横向6m的矩形范围(用双点划线表示)内的用户U向位置P接近的多个接近路径的例子。
在图9的情况下,向位置P接近的路径p存在多个。例如,路径p1表示钥匙K从汽车C的斜右前方向着位置P接近时的路径。路径p2表示钥匙K从汽车C的右侧方向着位置P接近时的路径。路径p3表示钥匙K从汽车C的斜右后方向着位置P接近时的路径。
根据路径的不同,有时汽车C的柱状物等成为障碍物而来自钥匙K的载波信号的RSSI暂时变弱后被天线34接收。即,有时会发生由于遮挡而RSSI变动。因而,在图9中路径p1的情况下,载波信号被驾驶座一侧的A柱干扰,因此RSSI有时会根据钥匙K和汽车C之间有无障碍物而发生变化。
此外,若载波信号不是从钥匙K直接到达天线44,则有时通过基于多路径的其他路径的载波信号相对地变强,由载波信号计算出的测距值Rm也会发生变化。即,有时会产生衰减导致的RSSI的变动。
如上所述地,钥匙K在汽车C的LF区域内进行规定次数的测距。在各测距的定时下,来自钥匙K的3个频率f1、f2、f3的载波信号在天线34中被接收,计算出各载波信号的RSSI。
图10是示出没有进行载波信号的中继,而在LF区域内进行了多次测距时的3个载波信号的RSSI和测距值的变化的图表。图10的横轴表示时间t的经过。图10的下侧图表表示测距值Rm的变化,上侧图表表示3个载波信号的RSSI的变化。图10是随着时间t的经过,钥匙K离开汽车C时的图表。
在各测距定时下测量出的3个载波信号的RSSI根据钥匙K与天线34之间的距离而进行变化。在钥匙K与天线34之间没有障碍物时,3个载波信号的RSSI大致相等。但是,当因为如上所述的障碍物而产生了衰减时,来自钥匙K的载波信号就难以到达天线34,3个载波信号之间的RSSI的差变大。
另一方面,测距值Rm也根据钥匙K与天线44之间的距离而进行变化。在钥匙K与天线44之间没有障碍物时,测距值Rm根据钥匙K与天线44之间的距离而进行变化。但是,当因为如上所述的障碍物而来自钥匙K的载波信号难以到达天线34时,因为多路径的影响而在测距值Rm中产生误差。
图10示出了在时刻t1之前和之后的定时下钥匙K与天线34之间没有障碍物,但在时刻t的定时下由于钥匙K与天线34之间有障碍物,因此各载波信号的RSSI和测距值Rm发生了变化的情况。
在图10中,由于在时刻t1,钥匙K与天线34之间有障碍物,因此3个载波信号间的RSSI的差较大。具体地,时刻t1下的3个载波信号的3个RSSI与时刻t1的前一个时刻t2下的3个载波信号的RSSI相比,相互有很大不同。
同样地,时刻t1下的测距值Rm与时刻t1的前一个时刻t2下的测距值Rm有很大不同。图10中ΔR表示相邻的2个时刻下的测距值Rm之差。
图11是基于申请人进行的实验结果,示出关于在多个定时下测量的多个RSSI的方差与关于在多个定时下计算出的多个测距值Rm的方差之间的相关的图表。图11中纵轴的值和横轴的值用进行了规定的标准化的值来表示。图11中的各点对应于图9中示出的多个路径中的1个路径上得到的关于多个RSSI的方差的值和关于多个测距值Rm的方差的值。
在本实施方式中,关于多个RSSI的方差包括第一RSSI之差的方差VS1和第二RSSI之差的方差VDDRSSI。图11的纵轴是第一RSSI之差的方差VS1与第二RSSI之差的方差VDDRSSI之和。此外,在本实施方式中,关于测距值Rm的方差是第一测距值之差的方差VD。图11的横轴为方差VD。
第一RSSI之差的方差VS1是在时间序列上测量的1个载波信号的RSSI的、在时间序列上相邻的2个RSSI之差的方差。换言之,第一RSSI之差的方差VS1是1个载波信号的RSSI的上一次值与本次值之差的方差。
第二RSSI之差的方差VDDRSSI是各自为3个RSSI间的3个差的绝对值之和的、在时间序列上相邻的2个和之差的方差。换言之,第二RSSI之差的方差VDDRSSI是3个RSSI间的3个差的绝对值之和的上次与本次之差的方差。
第一测距值之差的方差VD是在时间序列上相邻的2个测距值Rm的差的方差。换言之,第一测距值之差的方差VD是测距值Rm的上次与本次之差的方差。
下面,对各方差具体地进行说明。
在LF区域内进行m次作为规定次数的测距时,设L[n]为第n次(n为1至m中的一个)的测距结果即测距值Rm,设RSSI1[n]为对第n次的频率f1的载波信号测量出的RSSI值,设RSSI2[n]为对第n次的频率f2的载波信号测量出的RSSI值,设RSSI3[n]为对第n次的频率f3的载波信号测量出的RSSI值,此时,在时间序列上计算出多个测距值Rm,并用下面的式(1)表示上次[n-1]的测距值Rm与本次[n]的测距值Rm的差D[n]。测距值Rm的差D对应于图10中的ΔR。
D[n]=L[n-1]-L[n]……(1)
3个频率f1、f2、f3的3个RSSI间的3个差的绝对值之和DRSSI[n]用下面的式(2)表示。
DRSSI[n]=|RSSI1[n]-RSSI2[n]|+|RSSI3[n]-RSSI1[n]|+|RSSI3[n]-RSSI2[n]|……(2)
用式(2)表示的本次(第n次)的3个差的绝对值之和、与用式(2)表示的上次(第(n-1)次)的3个差的绝对值之和的差DDRSSI[n]用下面的式(3)表示。
DDRSSI[n]=DRSSI[n-1]-DRSSI[n]……(3)
此外,3个频率f1、f2、f3的每个频率的上次RSSI与本次RSSI的差DS1[n]、DS2[n]、DS3[n]分别用下面的式(4)、(5)、(6)表示。
DS1[n]=RSSI1[n-1]-RSSI1[n]……(4)
DS2[n]=RSSI2[n-1]-RSSI2[n]……(5)
DS3[n]=RSSI3[n-1]-RSSI3[n]……(6)
上次与本次的测距值Rm之差的方差VD用下面的式(7)表示。
即,式(7)表示的关于测距值Rm的方差,是多个差的方差,所述多个差是各自在时间序列上相邻的2个时刻下计算出的第一距离值与第二距离值的差。
此外,上次与本次RSSI1的方差VS1用下面的式(8)表示。
此外,在此仅使用了上次与本次的RSSI1之差的方差VS1,但也可以还使用上次与本次的RSSI2之差的方差VS2、上次与本次的RSSI3之差的方差VS3,从而计算VS=VS1+VS2+VS3,使用上次与本次的3个RSSI之差的和的方差VS来取代式(8)。
而且,DDRSSI[n](式(3))的方差VDDRSSI用下面的式(9)表示。
图11的横轴表示式(7)的VD的值,图11的纵轴表示式(8)的VS1与式(9)的VDDRSSI之和。
即,在此,关于多个RSSI的方差,是各自在时间序列上相邻的2个时刻下测量的2个接收信号强度的差这多个差的方差(式(8))、以及在相邻的2个时刻的第一时刻下测量的多个RSSI间的差的绝对值之和与在相邻的2个时刻的第二时刻下测量的多个RSSI间的差的绝对值之和之间的差的方差(式(9))。
根据申请人进行的实验显示,在式(7)的值(VD)和式(8)与式(9)之和(VS1+VDDRSSI)之间存在相关关系。如图11所示,式(8)与式(9)之和(VS1+VDDRSSI),与式(7)的值(VD)成比例地进行变化。
在此试着考虑在所谓的中继攻击中钥匙K和汽车C间的载波信号也被中继,在LF区域内从位于汽车C附近的人所携带的中继装置向汽车C发送相位随机变化的多个载波信号的情况。
图12是示出使载波信号的相位随机变化的多个载波信号被中继的中继攻击中的3个RSSI和测距值Rm的变化的例子的图表。
如图12所示,在被中继攻击时,由于位于汽车C附近的人通常在LF区域内站立于汽车C的附近,因此如图12的上侧图表所示地,各载波信号的RSSI的变动少。但是,由于发送相位随机变化的多个载波信号,因此如图12的下侧图表所示地,基于各载波信号的测距值Rm随机地变化。
图13是示出进行了相位随机变化的多个载波信号被发送的中继攻击的情况下的、关于多个RSSI的方差与关于多个测距值Rm的方差之间的相关的图表。图13的纵轴与图11的纵轴相同,是第一RSSI之差的方差VS1与第二RSSI之差的方差VDDRSSI之和,图13的横轴与图11的横轴相同,是方差VD。如图13所示,2个方差之和(式(8)与式(9)之和)较小,而测距值Rm之差的方差(式(7))较大。
即,在没有中继攻击时,如图11所示,2个方差之和(式(8)与式(9)之和)与测距值Rm之差的方差(式(7))之间存在相关,但在进行了载波信号被中继的中继攻击时,如图13所示地,2个方差之和(式(8)与式(9)之和)与测距值Rm之差的方差(式(7))之间不存在相关。
换言之,在未进行对载波信号进行中继的中继攻击时,存在下述这样的关系:测距值Rm之差的方差(式(7))越小,2个方差之和(式(8)与式(9)之和)也越小,而测距值Rm之差的方差(式(7))越大,2个方差之和(式(8)与式(9)之和)也越大。在进行了对载波信号进行中继的中继攻击时,测距值Rm之差的方差(式(7))总是很大,2个方差之和(式(8)与式(9)之和)与测距值Rm之差的方差(式(7))之间不存在相关。
如以上所述地,基于关于多个RSSI的方差和关于多个测距值Rm的方差之间有无相关,能够判断是否进行了对载波信号进行中继的中继攻击。
返回到图8,在S5中进行对测距值Rm之差的方差(式(7))和2个方差之和(式(8)与式(9)之和)进行计算的处理,将计算出的各种数据提供给有无载波信号中继判断部57。
有无载波信号中继判断部57基于在S5中计算出的各方差,制成例如图11或者图13所示的图表,并判断有无对载波信号进行中继的中继攻击(S6)。
图14是用于说明关于测量出的多个RSSI的方差与关于多个测距值Rm的方差之间有无相关的判断方法的例子的图。
绘出如图11所示的与关于测量出的多个RSSI的方差和关于计算出的多个测距值Rm的方差相对应的点,在图14所示的线L1和L2之间绘出了多个点的大部分时,判断为有相关。线L1和L2通过实验等预先设定。
此外,也可以在图14所示的线L1的下方绘出了多个点的大部分时,判断为进行了载波信号的中继。
图15是用于说明测量出的多个RSSI的方差与多个测距值Rm的方差之间有无相关的判断方法的其他例子的图。
绘出如图11所示的与关于测量出的多个RSSI的方差和关于多个测距值Rm的方差相对应的点,在图15所示的线L1的下方绘出了多个点的大部分时,判断为进行了载波信号的中继。此外,在图15所示的线L1的上侧绘出了多个点的大部分时,判断为有相关。
即,有无载波信号中继判断部57基于第二方差(式(8))和第三方差(式(9))之和与第一方差(式(7))之间有无相关,来判断有无载波信号的中继。
因而,有无载波信号中继判断部57能够在S6中使用如图14或者图15所示的判断方法,来判断是否进行了载波信号的中继。有无载波信号中继判断部57将判断出是否进行了载波信号的中继的判断信号输出给处理器11。
处理器11基于来自测距运算部54的测距值Rm和来自有无载波信号中继判断部57的关于有无中继攻击的判断信号,判断是否输出许可门解锁的许可信号。
根据上述处理,由于在各测距值Rm超过了规定距离、例如2m时存在中继攻击的可能性,因此,处理器11例如不对汽车C的控制装置输出许可门解锁的许可信号。
进一步地,在测距值Rm在规定的距离以下,且关于多个测距结果的方差和关于多个RSSI的方差之间存在相关时,推断为钥匙K处于距离汽车C规定的距离以内,也没有载波信号的中继,因此,处理器11例如对汽车C的控制装置输出许可门解锁的许可信号。该情况下,有无载波信号中继判断部57将表示未进行使用了载波信号的中继的中继攻击的判断信号输出给处理器11。
当接收了来自处理器11的许可门解锁的许可信号时,例如,在人手接触到门时,控制汽车C的门解锁的控制装置输出用于解锁门的控制信号。
但是,即使测距值Rm在规定的距离以下,在关于多个测距结果的方差和关于多个RSSI的方差之间没有相关时,即使钥匙K处于距离汽车C规定的距离以内,也推断为载波信号被中继,因此,处理器11例如不对汽车C的控制装置输出许可门解锁的许可信号。该情况下,后述的有无载波信号中继判断部57将表示进行了对载波信号进行中继的中继攻击的判断信号输出给处理器11。
设想在如上所述地载波信号被中继的情况下,位于汽车C附近的小偷等所持的中继装置以计算出表示钥匙K与汽车C很近的测距值Rm的方式生成相位随机变更的多个载波信号,并发送给汽车C。该情况下,在装置1中使用各载波信号的相位计算出的测距值Rm随机地变化,但由于来自中继装置的多个载波信号是从大致静止的位置射出的,因此关于多个载波信号的RSSI的方差很小。即,在载波信号被中继时,在关于多个测距结果即测距值Rm的方差和关于多个RSSI的方差之间没有相关。
反之,在载波信号没有被中继,用户U的钥匙K接近了汽车C时,随着用户U靠近汽车C,从钥匙K的装置2发送多个载波信号,在装置1中使用各载波信号的相位计算出的测距值Rm会逐渐地变化。该情况下,由于随着用户U靠近汽车C,多个载波信号逐渐变强,因此,关于多个载波信号的RSSI的方差变化。因而,在载波信号没有被中继时,在关于多个测距结果即测距值Rm的方差和关于多个RSSI的方差之间存在相关。
再有,在上述例子中,基于式(7)的值(VD)与式(8)和式(9)之和(VS1+VDDRSSI)之间的相关关系的有无,判断有无载波信号的中继,但作为实施方式的变形例,也可以使用其他值的相关关系来判断有无载波信号的中继。
(变形例1)
作为变形例1,也可以使用测距值Rm的方差作为关于测距值Rm的方差,使用RSSI的方差和3个频率的3个RSSI间的3个差的绝对值之和的方差作为关于RSSI的方差。
在变形例1中,关于测距值Rm的方差VL用下面的式(11)表示。
在此,L[n]为第n次(n为1至m中的一个)的测距结果即测距值Rm。在LF区域内进行m次作为规定次数的测距。式(11)表示m个测距值Rm的方差。
即,在此,关于测距值Rm的方差,是计算出的多个测距值Rm的方差(式(11))。
此外,作为关于RSSI的方差,使用m个RSSI的方差、例如用下面的式(12)表示的RSSI的方差VR1。
再有,在此仅使用了RSSI1的方差VR1,但也可以还使用其他2个RSSI2、RSSI3的方差VR2、VR3而计算VR=VR1+VR2+VR3,使用3个RSSI的方差之和VR来取代式(12)。
而且,作为关于RSSI的方差,使用例如用下面的式(13)表示的3个RSSI间的3个差的绝对值之和的方差VDRSSI。
在本变形例1的情况下,图11的横轴为式(11)的VL的值,图11的纵轴为式(12)的VR1和式(13)的VDRSSI之和。
即,关于RSSI的方差,是测量出的多个RSSI的方差(式(12))和测量出的多个RSSI间的差的绝对值之和的第三方差(式(13))。
有无载波信号中继判断部57基于方差(式(12))和方差(式(13))之和与方差(式(11))之间有无相关,来判断有无载波信号的中继。也基于如上述图14和图15所示的图表来进行判断方差(式(12))和方差(式(13))之和与方差(式(11))之间的相关的有无。
在本变形例1的情况下,使用测距值Rm的方差VL、RSSI的方差VR1、3个频率的3个RSSI间的3个差的绝对值之和的方差VDRSSI,来判断相关关系的有无。
(变形例2)
作为变形例2,也可以是,在从上次与本次的测距值Rm的差D[n]中减去在相同时刻测量出的1个RSSI的上次与本次的差(式(4)等)而得的值的绝对值之和为规定的阈值以上的情况下,判断为载波信号被中继。这根据的是,在未进行载波信号的中继时,推断出上次与本次的测距值Rm之差与在相同时刻测量出的1个RSSI的上次与本次的差之间存在相关。
例如,使用用下面的式(21)表示的值SD。
在此,A是用于使D[n]和RSSI[n]的值的比例尺相配合的标准化的常数。而且,在此,用测距次数m除从上次与本次的测距值Rm的差D[n]中减去在相同时刻测量出的3个RSSI内的1个的上次与本次的差(式(4)等)所得的值的绝对值之和。
即,通过将从时间序列上相邻的2个时刻下计算出的测距值Rm的差(D[n])中减去相邻的2个时刻下测量出的2个RSSI间的差(DS1[n])而得的值的绝对值之和或者用测距次数m除该和后的值、与规定的阈值(TH1)进行比较,有无载波信号中继判断部57判断有无载波信号的中继。
因而,若式(21)的值在规定的阈值TH1以上,则判断为载波信号被中继,若式(21)的值不足规定的阈值TH1,则判断为载波信号未被中继。
再有,在此仅使用了RSSI1的差DS1,但也可以还使用其他2个RSSI2、RSSI3的差DS2、DS3,从而计算SD=DS1+DS2+DS3,使用3个RSSI的差之和SD来取代式(21)。
再进一步地,也可以取代式(21)而使用下面的式(22)。
即,也可以是,在从上次与本次的测距值Rm的差D[n]中减去在相同时刻测量出的1个RSSI的上次与本次的差(式(4))以及3个频率的3个RSSI间的3个差之和的上次与本次的差(式(3))后所得的值的绝对值之和SDR、在规定的阈值TH2以上的情况下,判断为载波信号被中继。阈值TH2小于TH1。
在此,B是用于使D[n]和RSSI[n]的值的比例尺相配合的标准化的常数。而且,在此,用测距次数m除从上次与本次的测距值Rm的差D[n]中减去在相同时刻测量出的3个RSSI内的1个的上次与本次的差(式(4))以及3个频率的RSSI之间的3个差之和的上次与本次的差(式(3))后得到的值的绝对值之和。
即,通过将从时间序列上相邻的2个时刻下计算出的测距值Rm的差(D[n])中减去相邻的2个时刻下测量出的2个RSSI间的差(DS1[n])(式(4))以及DDRSSI[n](式(3))后得到的值的绝对值之和或者用测距次数(m)除该和而得的值、与规定的阈值(TH2)进行比较,有无载波信号中继判断部57判断有无载波信号的中继,DDRSSI[n]是相邻的2个时刻的第一时刻下测量出的多个RSSI间的差的绝对值之和与相邻的2个时刻的第二时刻下测量出的多个RSSI间的差的绝对值之和的差。
如以上所述地,根据上述实施方式以及各变形例,能够提供一种可以判断有无载波信号的中继的测距装置以及测距方法。
再有,在上述实施方式和各变形例中使用了在装置1的RSSI测量部55中测量出的3个载波信号的RSSI,但也可以如图7中的点划线所示地,在装置2的测距部24中也设置RSSI测量部77,将在装置2中接收到的载波信号的RSSI发送给装置1,在装置1中使用在装置1和2中接收到的多个载波信号的RSSI,或者使用在装置2中接收到的多个载波信号的RSSI,来判断相关的有无。
此外,在上述实施方式以及各变形例中,测距部14的相关判断用数据计算部56和有无载波信号中继判断部57由与控制部51相独立的电路来实现,但也可以如图6中的双点划线所示地,将测距值Rm和RSSI的数据提供给控制部51,在控制部51中由软件或者电路来实现。
以上对本发明的几个实施方式进行了说明,但这些实施方式是作为例子而提出的,并不意图限定发明范围。这些新的实施方式可以以其他各种各样的方式实施,可以在不脱离发明主旨的范围内进行各种各样的省略、置换和变更。这些实施方式或其变形包含在发明范围或主旨内,并且也包含在权利要求记载的发明及其等效的范围内。
- 测距装置、测距方法、测距程序及测距系统以及拍摄装置
- 测距装置、测距方法、测距程序及测距系统以及拍摄装置