基于深度学习与多目标跟踪算法的视频SAR动目标检测方法
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及一种基于深度学习与多目标跟踪算法的视频SAR动目标检测方法,属于雷达技术领域,。
背景技术
合成孔径雷达(Synthetic Aperture Radar,SAR)因其对目标区域全天候、全天时成像的能力在现代遥感领域具有重要意义。但传统的SAR系统成像帧率较低,无法提供可靠的动目标定位。视频SAR作为一种新的成像模式,能够高帧率连续地对目标场景高分辨率成像,以动态的方式对目标区域持续监测,并直观地反映目标的运动和场景变化等动态信息。由于视频SAR的工作频率较高,动目标回波的多普勒调制对其运动很敏感,目标的运动会导致其在图像中出现散焦和偏移,并在其真实位置留下了阴影。因此可以通过检测阴影实现动目标的监测。
近年来,基于深度学习的方法在目标检测上取得了最优异的检测结果。众多学者已经探讨了深度学习在SAR图像目标检测中的可行性。但由于SAR图像的特征简单,只利用深度神经网络进行动目标阴影检测会出现较多的虚警和漏警,基于深度学习的检测方法亟待完善。
发明内容
针对上述背景技术提到的问题,本发明提出了一种基于深度学习与多目标跟踪算法的视频SAR动目标检测方法。
本发明为解决其技术问题采用如下技术方案:
一种基于深度学习与多目标跟踪算法的视频SAR动目标检测方法,包括如下步骤:
步骤1:采用基于特征金字塔结构的Faster R-CNN网络检测单帧视频SAR图像中的动目标阴影;
步骤2:利用上述步骤1中的检测结果初始化试探性跟踪器;
步骤3:将检测结果与跟踪关联,并使用关联的检测结果更新跟踪器;
步骤4:将连续更新三帧的试探性跟踪转为稳定跟踪并删除其余试探性跟踪;
步骤5:将连续三帧未更新的稳定跟踪转为候选跟踪;
步骤6:若有关联的检测结果更新步骤5中的候选跟踪,将候选跟踪转为稳定跟踪;
步骤7:若步骤5中的候选跟踪未更新的次数超出阈值,将候选跟踪删除。
所述步骤2中的检测结果使用如下八维状态空间描述:
式中,x和y分别表示目标中心的横纵坐标,a和h分别表示目标边界框的宽高比例和高度,
所述步骤3中所述检测结果与跟踪关联是通过匈牙利算法实现。
本发明的有益效果如下:
1、本发明首先利用基于特征金字塔结构的Faster R-CNN(快速区域卷积神经网络)目标检测网络检测单帧视频SAR图像中的动目标阴影。然后采用基于检测的多目标跟踪算法跟踪动目标阴影,提高了检测概率并降低了虚警率。
2、本发明将基于检测的多目标跟踪算法应用于视频SAR动目标阴影检测中,具有检测精度较高,简单易实现且实时性较好的特点。
附图说明
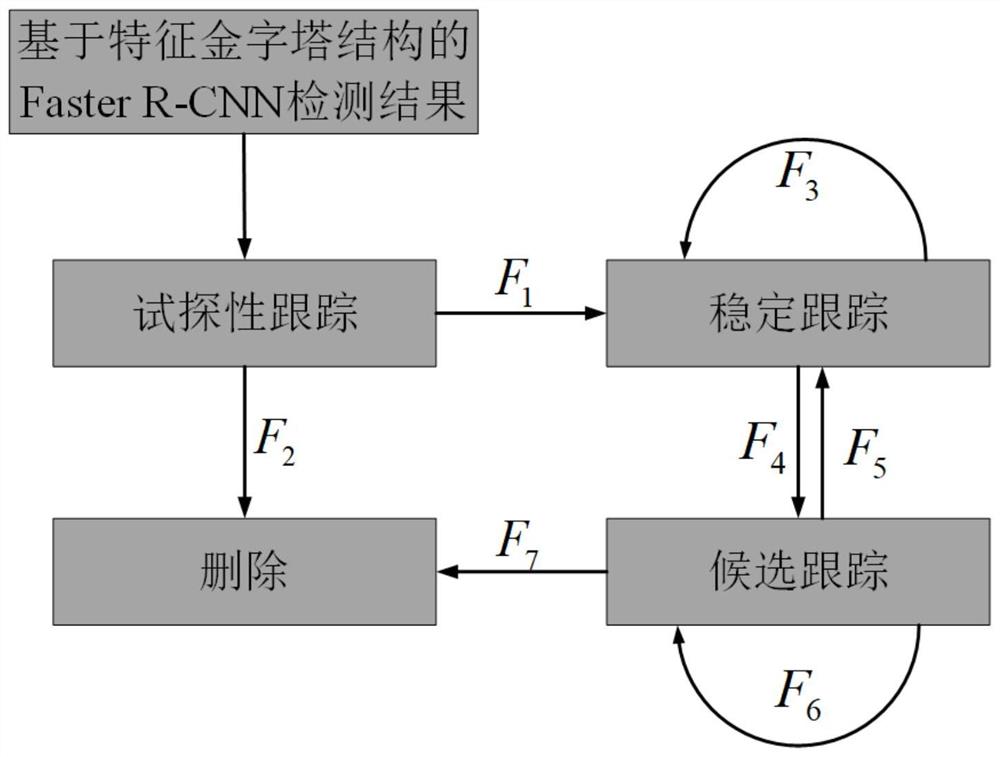
图1是本发明的一种基于深度学习与多目标跟踪算法的视频SAR动目标阴影检测方法的跟踪处理流程图。
图2(a)和图2(b)均为基于特征金字塔结构的Faster R-CNN的初步检测结果图。
图3(a)和图3(b)均为两多目标跟踪算法处理结果图。
具体实施方式
下面将结合附图,对本发明的技术方案进行详细的说明。本发明所描述的实施例仅用于解释本发明,并不构成对本发明的不当限定。
如图1所示,本实施例提供了一种基于深度学习与多目标跟踪算法的视频SAR动目标阴影检测方法,其具体步骤如下:
步骤1:采用基于特征金字塔结构的Faster R-CNN网络检测单帧视频SAR图像中的动目标阴影。
步骤2:利用上述步骤1中的检测结果初始化试探性跟踪器。
检测结果使用如下八维状态空间描述:
式中,x和y分别表示目标中心的横、纵坐标,a和h分别表示目标边界框的宽高比例和高度,其余四个变量分别表示x、y、a和h的变化速率。跟踪器使用卡尔曼滤波处理,使用参数(x,y,a,h)初始化跟踪状态,相应的速度分量设置为零。
步骤3:使用关联的检测结果更新跟踪器。
关联检测与跟踪通过匈牙利算法实现,分配的代价矩阵由检测边界框与跟踪边界框的交并比组成,并在最后去除交并比小于0.3的关联结果。
步骤4:将连续更新三帧的试探性跟踪转为稳定跟踪并删除其余试探性跟踪。
试探性跟踪连续更新三帧表明成功跟踪目标,删除其余试探性跟踪可以有效降低虚警。
步骤5:将连续三帧未更新的稳定跟踪转为候选跟踪。
若有稳定跟踪连续三帧没有匹配的检测结果更新,将其状态转为候选跟踪。表示跟踪目标暂时消失在场景中。
步骤6:若有关联的检测结果更新步骤5中的候选跟踪,将候选跟踪转为稳定跟踪。
一旦有检测结果与候选跟踪匹配,将候选跟踪转为稳定跟踪,表示目标重新出现在场景中。
步骤7:若步骤5中的候选跟踪未更新的次数超出阈值,将候选跟踪删除。
所述的阈值设置为30-40,超出阈值的候选跟踪被删除表示目标完全离开场景。
对比图2与图3可知,Faster R-CNN的初步检测结果中存在较多虚警和漏警,采用多目标跟踪算法对检测结果进行跟踪处理后,动目标阴影的检测效果有了明显的改善。
为了更好地说明本发明的性能,对视频SAR的共140帧图像(其中共有779个动目标阴影)进行了测试,统计结果在表1给出。
表1 140帧视频SAR检测结果
在140帧图像中共有阴影779个,本发明提出的方法正确检测到745个,另有4个虚警和34个漏警。可以看出本发明提出的方法能够在视频SAR动目标阴影检测上取得了良好的效果。
以上实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明保护范围之内。
- 基于深度学习与多目标跟踪算法的视频SAR动目标检测方法
- 一种基于视频SAR的运动目标检测方法