一种医用自消毒物流机器人及其控制方法
文献发布时间:2023-06-19 12:21:13
技术领域
本发明涉及物流机器人技术领域,尤其涉及一种医用自消毒物流机器人及其控制方法。
背景技术
随着机器人技术的快速发展,物流机器人开始被应用于不同场景中的物品转运和派送。
其中,在医疗领域中,物流机器人也被广泛应用于多病房的送药、送餐、巡视乃至医疗垃圾清理等重复性的工作场景中。目前,在物流机器人的物流配送过程,通常是在物品装填完成之后,根据派单目的地依次前往指定目标病区,然后,医护人员通过指纹识别后取出物品,物流机器人直至完成所有目标节点的配送后返回发货地点。
在使用物流机器人送货时,常常会出现意外情况,比如机器人偏离路线,难以自动校正,物流机器人进行物品配送需要为机器人设定目标地点。但是在某些情况下,需要临时改变物流机器人的移动目的地(即目标地点),传统的物流机器人显然不能满足上述需求。因此,需要一种医用自消毒物流机器人及其控制方法。
发明内容
基于物流机器人移动送货定位不准确的技术问题,本发明提出了一种医用自消毒物流机器人及其控制方法。
本发明提出的一种医用自消毒物流机器人及其控制方法,包括定位模块、驱动模块、无线通信模块、中央控制器、应用模块、信息采集装置、供电模块和机器人本体,所述应用模块包括地图浏览和距离感应器,所述信息采集装置包括循环识别传感器、摄像头、声音传感器和NFC模块,所述供电向物流机器人供电。
优选地,所述机器人本体的底部外壁固定有水箱,且水箱的底部外壁靠近前侧固定有转向器,转向器上设置有转向轴,转向轴的左右两端设置有车轮。
优选地,所述水箱的底部外壁固定有对称分布的两个安装块,安装块上转动连接有动力轴,动力轴的左右两端固定安装车轮,循环识别传感器固定安装于水箱的底部,循环识别传感器上设置有识别镜头。
优选地,所述机器人本体的顶端边缘处固定有喷淋管,且喷淋管的圆周外壁固定安装有等距分布的喷头,喷头位于机器人本体的每个侧壁和机器人本体的顶壁靠近前侧,水箱的左右两端固定连接有对称分布的两个输水管,输水管的顶端与喷淋管固定连接。
优选地,所述机器人本体的前侧外壁设置有多个智能门,智能门上均设置有感应片,机器人本体的顶部设置有键入盘,机器人本体的顶部靠近中间位置设置有触摸屏。
优选地,所述中央控制器分别与定位模块、驱动模块、无线通信模块、应用模块、信息采集装置和供电模块电连接。
优选地,所述地图浏览的后台代码接口与百度地图、高德地图的数据接口连接,并可直接调用百度地图或高德地图,地图浏览的后台代码接口也可与人工输入数据接口连接。
优选地,所述机器人本体内设置有电机,且驱动模块与电机电连接,驱动模块控制电机的启停和转速。
优选地,所述中央控制器通过无线通信模块与主机服务器后台连接获取指令,机器人本体内设置有语音播报装置,语音装置播报取货通知语音或者向取货提示终端发送取货通知信息。
优选地,所述医用自消毒物流机器人及其控制方法包括以下步骤:
S1:客户通过手机等客户端购买商品;
S2:工作人员通过主机接收到信息后开始装货;
S3:机器人本体按照目的地的先后顺序移动,将商品送至不同的区域;
S4:客户通过感应片识别NFC、摄像头识别人脸或在键入盘上输入取货码取货;
S5:在送完一个区域后,喷头喷消毒剂进行自消毒,进入下一个送货区域;
S6:当所有订单送完后,机器人本体自动返回充电区充电。
本发明中的有益效果为:
1、该医用自消毒物流机器人及其控制方法,通过设置的循环识别且,循环识别传感器上设置有识别镜头,识别地面铺设上的色带,使装置能够根据指定的路线自动循环移动,防止物流机器人偏离预设路线,导致物品无法送达。
2、该医用自消毒物流机器人及其控制方法,通过设置的喷淋管、喷头、输水管、水箱,喷头分布于机器人本体的每个侧壁顶端和机器人本体的顶部前侧,水箱中的消毒剂通过输水管向上输送,从每个喷头喷出,从喷头喷出的消毒剂刚好能将机器人本体的顶部和机器人本体的每个侧壁覆盖,从而能将物流机器人清洗干净,有效地避免物流机器人在病菌环境中工作时受到病原体的污染所造成交叉感染。
该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现,本发明整体结构简单,定位送货更加精确,操作更加便捷,自动消毒使用更加安全。
附图说明
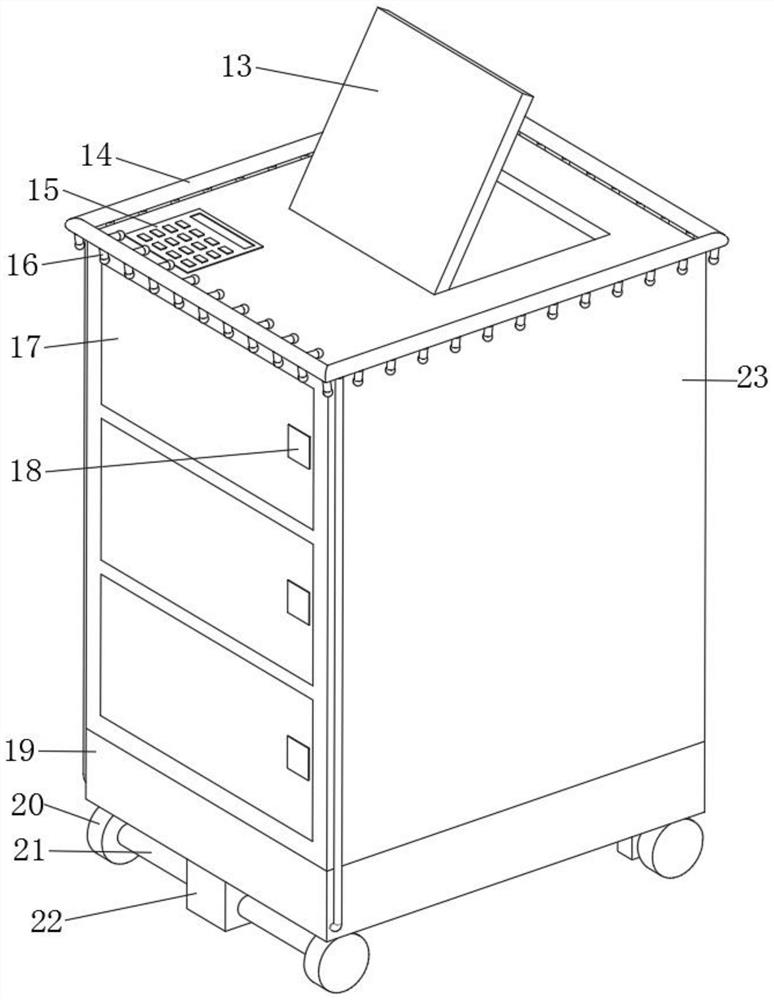
图1为本发明提出的一种医用自消毒物流机器人及其控制方法的机器人整体结构示意图;
图2为本发明提出的一种医用自消毒物流机器人及其控制方法的机器人底部结构示意图;
图3为本发明提出的一种医用自消毒物流机器人及其控制方法的结构示意框图。
图中:1-地图浏览、2-距离感应器、3-循环识别传感器、4-摄像头、5-声音传感器、6-NFC模块、7-定位模块、8-驱动模块、9-无线通信模块、10-中央控制器、11-应用模块、12-信息采集装置、13-触摸屏、14-喷淋管、15-键入盘、16-喷头、17-智能门、18-感应片、19-水箱、20-车轮、21-转向轴、22-转向器、23-机器人本体、24-输水管、25-识别镜头、26-动力轴、27-安装块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
参照图1-3,一种医用自消毒物流机器人及其控制方法,包括定位模块7、驱动模块8、无线通信模块9、中央控制器10、应用模块11、信息采集装置12、供电模块和机器人本体23,应用模块11包括地图浏览1和距离感应器2,信息采集装置12包括循环识别传感器3、摄像头4、声音传感器5和NFC模块6,供电向物流机器人供电。
本发明中,机器人本体23的底部外壁固定有水箱19,且水箱19的底部外壁靠近前侧固定有转向器22,转向器22上设置有转向轴21,转向轴21的左右两端设置有车轮20。
本发明中,水箱19的底部外壁固定有对称分布的两个安装块27,安装块27上转动连接有动力轴26,动力轴26的左右两端固定安装车轮20,循环识别传感器3固定安装于水箱19的底部,循环识别传感器3上设置有识别镜头25,识别地面铺设上的色带,使装置能够根据指定的路线自动循环移动,防止物流机器人偏离预设路线,导致物品无法送达。
本发明中,机器人本体23的顶端边缘处固定有喷淋管14,且喷淋管14的圆周外壁固定安装有等距分布的喷头16,喷头16位于机器人本体23的每个侧壁和机器人本体23的顶壁靠近前侧,水箱19的左右两端固定连接有对称分布的两个输水管24,输水管24的顶端与喷淋管14固定连接,通过设置的喷淋管14、喷头16、输水管24、水箱19,喷头16分布于机器人本体23的每个侧壁顶端和机器人本体23的顶部前侧,水箱19中的消毒剂通过输水管24向上输送,从每个喷头16喷出,从喷头16喷出的消毒剂刚好能将机器人本体23的顶部和机器人本体23的每个侧壁覆盖,从而能将物流机器人清洗干净,有效地避免物流机器人在病菌环境中工作时受到病原体的污染所造成交叉感染。
本发明中,机器人本体23的前侧外壁设置有多个智能门17,智能门17上均设置有感应片18,机器人本体23的顶部设置有键入盘15,机器人本体23的顶部靠近中间位置设置有触摸屏13。
本发明中,中央控制器10分别与定位模块7、驱动模块8、无线通信模块9、应用模块11、信息采集装置12和供电模块电连接。
本发明中,地图浏览1的后台代码接口与百度地图、高德地图的数据接口连接,并可直接调用百度地图或高德地图,地图浏览1的后台代码接口也可与人工输入数据接口连接,定位模块7用于确定机器人本体23的位置,便于人们实时掌握物品的地点。
本发明中,机器人本体23内设置有电机,且驱动模块8与电机电连接,驱动模块8控制电机的启停和转速,从而控制机器人本体23的移动。
本发明中,中央控制器10通过无线通信模块9与主机服务器后台连接获取指令,机器人本体23内设置有语音播报装置,语音装置播报取货通知语音或者向取货提示终端发送取货通知信息。
本发明中,医用自消毒物流机器人及其控制方法包括以下步骤:
S1:客户通过手机等客户端购买商品;
S2:工作人员通过主机接收到信息后开始装货;
S3:机器人本体23按照目的地的先后顺序移动,将商品送至不同的区域;
S4:客户通过感应片18识别NFC、摄像头4识别人脸或在键入盘15上输入取货码取货;
S5:在送完一个区域后,喷头16喷消毒剂进行自消毒,进入下一个送货区域;
S6:当所有订单送完后,机器人本体23自动返回充电区充电。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种医用自消毒物流机器人及其控制方法
- 医用自消毒物流机器人及其控制方法