一种双臂机器人分拣任务控制方法
文献发布时间:2023-06-19 13:48:08
技术领域
本发明属于航天智能制造领域,涉及到一种双臂机器人分拣任务控制方法。
背景技术
伴随着我国航天行业的快速发展,航天产品研制已经发展到更复杂、更高级的阶段,高强密度的研制发射更成为一个新的常态。随着新型大功率型号产品的研制和航天现场对制造装配工艺高效率、高成功率需求的不断提高,目前航天制造现场存在生产力发展不适应生产需求的矛盾,智能制造已成为航天制造业发展的必然趋势。航天制造中零件数目巨大,决定了分拣工艺在航空航天制造过程中起着非常重要的作用。由于分拣技术不够成熟,没有形成完整的数字化分拣系统,大多仍采用大批量生产的传统的手工分拣模式,传统的手工分拣方式被高效的数字化、集成化、自动化分拣模式取代,成为航空航天制造技术发展的必然趋势。
发明内容
本发明解决的技术问题是:克服现有技术的不足,提供一种双臂机器人分拣任务控制方法。
本发明解决技术的方案是:一种双臂机器人分拣任务控制方法,包括如下步骤:
从机器人面对台面视角,将操作台面从左到右均分为A区域,B区域和C区域三部分,其中B区域为分拣区域,左臂分拣物放置区域为A区域,右臂分拣物放置区域为C区域;
为待分拣物编号为1,2…n,待分拣物随机分布在操作台面B区域,设计A区域放置编号为1到
采用双目视觉获取待分拣物高度,对A、C区域内的待分拣物高度分别进行降序排序,左臂与右臂分别按照从高到矮的顺序实施分拣;
设置机械臂分拣路径,所述的路径由分拣点、中间位置点以及放置点组成,对于左臂的中间位置点P1位于B区域和A区域分界线段的中点正上方,右臂的中间位置点P2位于B区域和C区域分界线段的中点正上方,距离分拣台面高度均为H,H=max{h
左机械臂和或右机械臂分别根据控制按照设置的分拣路径开始分拣。
优选的,为左机械臂和右机械臂的控制分别分配一个独立的进程,每个进程均可上锁,当进程上锁时,只执行对应进程的机械臂分拣控制。
优选的,在左右两机械臂中任意一条机械臂运动时,控制另一条机械臂进程上锁,实现单臂分拣;
默认两个进程均开锁,左右两机械臂同时进行分拣;在预设的左右两机械臂可能发生干涉碰撞的区域,控制其中一个进程上锁、另一进程开锁,指定单臂进行分拣。
优选的,两机械臂可能发生干涉碰撞的区域最大范围为B区域,最小范围为以L中点为圆心,以
优选的,通过下述方式控制左机械臂或右机械臂开始分拣:
将当前控制机械臂从初始位置运动到其中间位置点;
发送指令控制当前控制机械臂从其对应的分拣区域内抓取当前最高的待分拣物,抓取完成后控制机械臂运动到其中间位置点;
控制上述机械臂从中间位置点运动到其分拣物放置区域,并将分拣物放置在指定区域,重复上述过程,直至分拣区域内无待分拣物。
优选的,抓取时,首先控制机械臂夹爪中心运动至距台面高度h
优选的,上述目标位置在台面上的投影点为当前待分拣物的中心。
优选的,抓取时,机械臂所用夹爪至少为2指夹爪;若所用夹爪夹指数大于2或夹爪夹指数等于2但待分拣物无对称轴,则优选夹爪目标姿态垂直于台面;若所用夹爪夹指数等于2且待分拣物有且只有一条对称轴,则优选夹爪目标姿态为夹爪垂直于台面且两夹指中心点连线与待分拣物对称轴同轴;若所用夹爪夹指数等于2且待分拣物对称轴数量大于一条,则优选夹爪目标姿态为夹爪垂直于台面且两夹指中心点连线与待分拣物最短对称线段同轴。
本发明与现有技术相比的有益效果是:
本发明瞄准航天智能制造中分拣任务,设计双臂机器人分拣控制方法,提高航天智能制造中分拣速度和效率,并且设计的分拣控制方法既能避免双臂在分拣操作中产生碰撞,又能兼顾双臂分拣效率。
附图说明
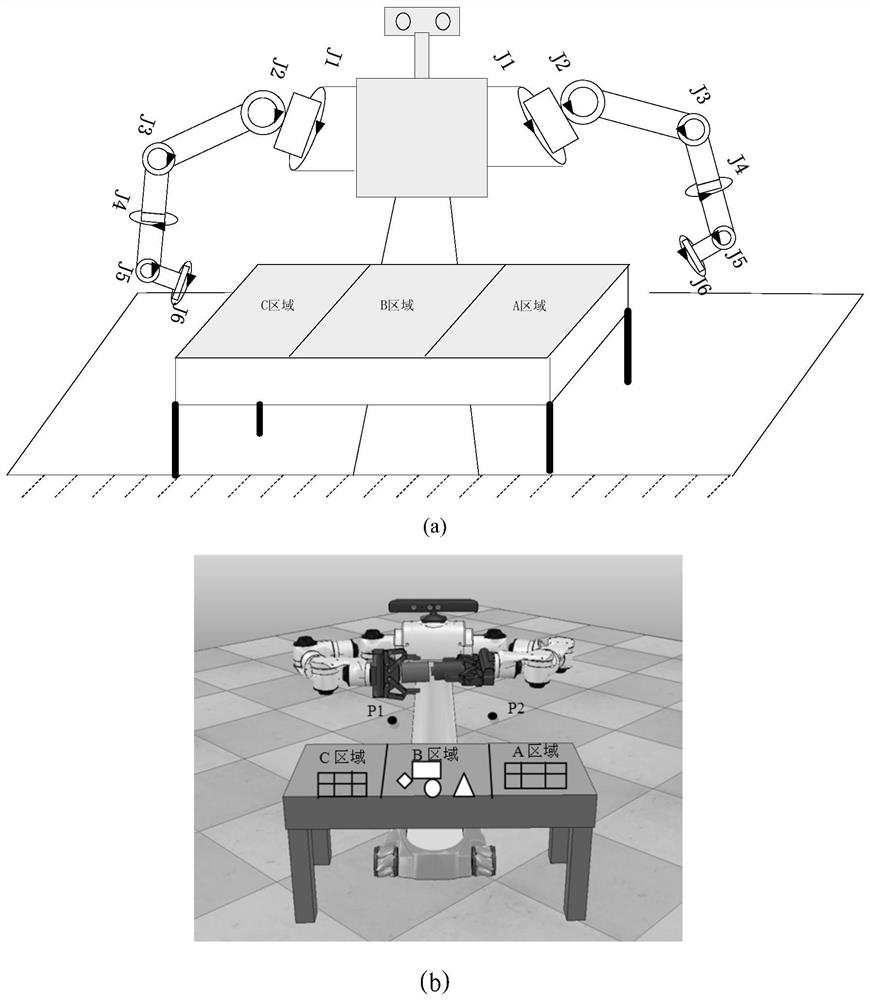
图1为本发明双臂机器人操作示意图;
图2为本发明左臂分拣控制流程图;
图3为本发明右臂分拣控制流程图;
图4为本发明双臂分拣控制流程图。
具体实施方式
下面结合实施例对本发明作进一步阐述。
本发明一种双臂机器人分拣任务控制方法,步骤如下:
1、如图1所示,从机器人面对台面视角,将操作台面从左到右均分为A区域,B区域和C区域三部分,其中B区域为分拣区域,A区域和C区域为放置区域,为了避免双臂机器人碰撞,实现双臂同时分拣以提高效率,设计左臂分拣物放置区域为A区域,右臂分拣物放置区域为C区域。
2、为待分拣物编号为1,2…n,待分拣物随机分布在操作台面B区域,设计A区域放置编号为1到
3.采用双目视觉获取待分拣物位姿及高度,对编号为1到
4.设置左臂放置中间位置点P1和右臂放置中间位置点P2。P2点位于B区域和C区域分界线段L1的中点正上方,距离分拣台面高度为H,P1点位于B区域和A区域分界线段L2的中点正上方,距离分拣台面高度为H米。H=max{h
设置机械臂分拣路径,所述的路径由分拣点、中间位置点以及放置点组成。优选的,分拣路径由分拣点、中间位置点、目标位置以及放置点组成。
上述目标位置为机械臂夹爪中心运动至距台面高度h
5、根据需要控制左机械臂和或右机械臂根据控制按照设置的分拣路径开始分拣。
其中,双臂机器人左臂的分拣流程图如图2所示。双臂机器人右臂的分拣流程图如图3所示。具体控制步骤概括如下:
将当前控制臂从初始位置运动到其中间位置点;
发送指令控制当前控制臂从中间位置运动至目标位置,之后从其对应的分拣区域内抓取当前最高的待分拣物,抓取完成后控制机械臂运动到其中间位置点;
控制上述机械臂从中间位置点运动到其分拣物放置区域,并将分拣物放置在指定区域,重复上述过程,直至分拣区域内无待分拣物。
抓取时,机械臂所用夹爪至少为2指夹爪;若所用夹爪夹指数大于2或夹爪夹指数等于2但待分拣物无对称轴,则优选夹爪目标姿态垂直于台面;若所用夹爪夹指数等于2且待分拣物有且只有一条对称轴,则优选夹爪目标姿态为夹爪垂直于台面且两夹指中心点连线与待分拣物对称轴同轴;若所用夹爪夹指数等于2且待分拣物对称轴数量大于一条,则优选夹爪目标姿态为夹爪垂直于台面且两夹指中心点连线与待分拣物最短对称线段同轴。
本发明设计多进程双臂机器人控制算法,每条机械臂的控制为一个进程,双臂机器人左臂运动控制由进程1控制,双臂机器人右臂运动控制由进程2控制。当左臂进程上锁,可保证程序只执行左臂运动控制进程1;当左臂进程开锁,程序可执行其他运动控制进程。同理,当右臂进程上锁,可保证程序只执行右臂运动控制进程2;当右臂进程开锁,程序可执行其他运动控制进程;当两个进程都开锁时,可同时控制双臂机器人进行分拣;
本发明可控制双臂机器人双臂同时运动或同一时间只有指定的单臂运动。双臂同时运动能够提高双臂机器人分拣效率,在双臂可能发生干涉碰撞的区域同一时间只有指定的单臂运动,可避免机器人双臂碰撞,保证双臂机器人分拣任务顺利进行。双臂机器人分拣流程图如图4所示。
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
- 一种双臂机器人分拣任务控制方法
- 一种基于双臂机器人的图书分拣方法及装置