一种自动移栽机取苗机构
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及智能高效农机设备技术领域,具体涉及一种自动移栽机取苗机构。
背景技术
中国是农业大国,蔬菜种植面积较为广泛,而蔬菜的种植方式通常以移栽为主,随着市场需求量的不断增大,人工移栽,或需人工取喂苗的半自动移栽机,因其强度大、效率低、成本高,已经不能满足人们的需求。而全自动移栽机取苗和植苗都是由机械自动完成,越来越受到种植人员的青睐,但是国内对穴盘育苗技术的研究时间不长,全自动移栽机使用还存在诸多问题。要实现全自动移栽,取苗机构的研究是重点与热点,取苗机构作为全自动移栽机的核心部分,对于蔬菜幼苗的移栽起到重要的作用。现有技术中,取苗机构采用抓紧或夹紧的方式将蔬菜幼苗从穴盘中取出,存在破坏基土或损坏幼苗的问题。其次,现有的取苗机构只是单纯的取苗,在对穴盘进行抓取时,不能识别死苗无法及时将其剔除,造成了一定的经济损失,在空苗的情况依旧进行抓取,存在多余动作降低了工作效率。
因此亟需设计一种自动移栽机取苗机构来解决上述问题。
发明内容
本发明提供一种自动移栽机取苗机构,以解决现有技术存在的问题。
为解决上述技术问题,本发明采取了如下技术方案:
一种自动移栽机取苗机构,包括:
取苗爪机构,用于抓取钵苗,所述取苗爪机构包括夹取针和爪锚钩,所述爪锚钩上设置圆孔,夹取针穿插在圆孔内,
横向移动机构,固定连接于移栽机上,用于驱动取苗爪机构水平移动,
第一纵向移动机构,滑动连接于所述横向移动机构上,用于驱动所述取苗爪机构纵向移动,
第二纵向移动机构,通过固定架与所述第一纵向移动机构固定连接,用于驱动所述夹取针纵向移动,
识别单元,用于采集钵苗图像数据,将检测到的图像信号输送至控制器;
控制器,用于对采集的图像数据进行分析判断,根据分析结果控制所述取苗爪机构、横向移动机构、第一纵向移动机构和第二纵向移动机构运动。
进一步的,所述第二纵向移动机构为液压缸,所述液压缸包括缸体和活塞杆,所述缸体通过固定架与所述第一纵向移动机构固定连接。
进一步的,所述取苗爪机构还包括固定圆盘和移动台,所述固定圆盘固定连接于所述固定架底部,所述固定架上设置第一开口,所述缸体贯穿所述第一开口并与所述固定圆盘固定连接,所述固定圆盘上设置第二开口,所述活塞杆穿过所述第二开口并与所述移动台固定连接。
进一步的,所述爪锚钩固定连接于所述固定圆盘上,所述夹取针铰接设置于所述移动台上。
进一步的,所述横向移动机构包括包括第一支撑部和第一滑动部,所述第一支撑部固定设置于移栽机上,所述第一滑动部与所述第一支撑部滑动连接。
进一步的,所述第一纵向移动机构包括第二支撑部和第二滑动部,所述第二滑动部与所述第二支撑部滑动连接,所述第二支撑部固定设置于所述第一滑动部上,所述第二滑动部与所述固定架固定连接。
进一步的,所述夹取针和爪锚钩数量均为四个。
与现有技术相比,本发明提供的自动移栽机取苗机构具有以下有益效果:
本发明通过识别单元实时监测出病苗、死苗、钵体不完整等情况,智能化程度高,根据监测结果的异常情况不同,控制器控制取苗爪机构、横向移动机构、第一纵向移动机构和第二纵向移动机构运动,不抓取病苗、死苗,避免在病苗、死苗或空苗的情况依旧进行抓取,减少多余动作,提高工作效率;
采用夹取针和爪锚钩共同取苗抓取的方案,爪锚钩可以从四周包裹固定基土,有效降低了破坏基土或损坏幼苗的问题。
附图说明
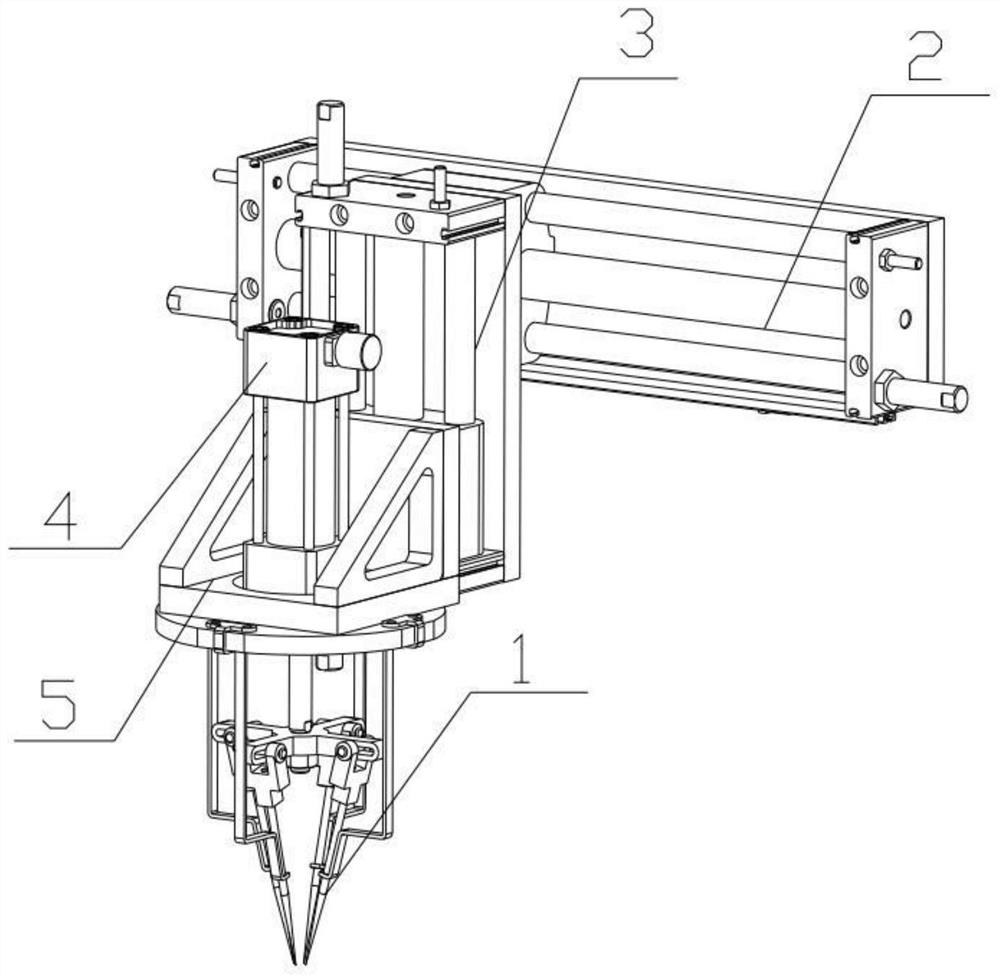
图1为本发明整体结构示意图。
图2为本发明取苗爪机构结构示意图。
图3为本发明夹取针和移动台连接结构示意图。
图4为本发明爪锚钩和固定圆盘连接结构示意图。
图5为本发明横向移动机构结构示意图。
图6为本发明第一纵向移动机构和固定架连接结构示意图。
图7为本发明第二纵向移动机构结构示意图。
其中,1-取苗爪机构,11-夹取针,12-爪锚钩,13-固定圆盘,14-移动台,15-第二开口,16-圆孔,2-横向移动机构,21-第一支撑部,22-第一滑动部,3-第一纵向移动机构,31-第二支撑部,32-第二滑动部,4-第二纵向移动机构,41-缸体,42-活塞杆,5-固定架,51-第一开口。
具体实施方式
以下通过附图和实施例对本发明的技术方案作进一步说明。
结合图1至图7,本发明提供一种自动移栽机取苗机构,包括:
取苗爪机构1,用于抓取钵苗,所述取苗爪机构1包括夹取针11、爪锚钩12、固定圆盘13和移动台14;
横向移动机构2,固定连接于移栽机上,用于驱动取苗爪机构1水平移动,
第一纵向移动机构3,滑动连接于所述横向移动机构2上,用于驱动所述取苗爪机构1纵向移动,
第二纵向移动机构4,通过固定架5与所述第一纵向移动机构3固定连接,用于驱动所述夹取针11纵向移动,
识别单元,用于采集钵苗图像数据,将检测到的图像信号输送至控制器;本实施例中识别单元为工业相机,可以对钵苗进行拍照;识别单元设置在固定圆盘13底部,方便对钵苗进行拍照,从而获取钵苗不同情况(良苗、病苗、死苗和空苗)的信息数据,
控制器,用于对采集的图像数据进行分析判断,根据分析结果控制所述取苗爪机构1、横向移动机构2、第一纵向移动机构3和第二纵向移动机构4运动,当钵苗为死苗或病苗时,第一纵向移动机构3和第二纵向移动机构4不进行下降运动,即不进行抓取,减少多余动作;控制器控制横向移动机构2继续水平移动,当分析结果显示为正常钵苗时,控制器第一纵向移动机构3和第二纵向移动机构4不进行下降运动,随后进行抓取。
优选的,所述第二纵向移动机构4为液压缸,所述液压缸包括缸体41和活塞杆42,所述缸体41通过固定架5与所述第一纵向移动机构3固定连接。第一纵向移动机构3可以带动第二纵向移动机构4整体上下移动,从而实现取苗爪机构1的上下移动。
优选的,所述固定圆盘13固定连接于所述固定架5底部,所述固定架5上设置第一开口51,所述缸体41贯穿所述第一开口51并与所述固定圆盘13固定连接,所述固定圆盘13上设置第二开口15,所述活塞杆42穿过所述第二开口15并与所述移动台14固定连接。所述爪锚钩12固定连接于所述固定圆盘13上,所述夹取针11铰接设置于所述移动台14上。第二纵向移动机构4启动,活塞杆42进行上下往复运动,移动台14随活塞杆42上下移动,即夹取针11进行上下移动,此时爪锚钩12是固定连接在固定圆盘13上,因此爪锚钩12没有移动。
优选的,所述横向移动机构2包括包括第一支撑部21和第一滑动部22,所述第一支撑部21固定设置于移栽机上,所述第一滑动部22与所述第一支撑部21滑动连接。所述第一纵向移动机构3包括第二支撑部31和第二滑动部32,所述第二滑动部32与所述第二支撑部31滑动连接,所述第二支撑部31固定设置于所述第一滑动部22上,所述第二滑动部32与所述固定架5固定连接。第一滑动部22进行左右移动时,可以带动第一纵向移动机构3整体左右移动。本实施例中,横向移动机构2和第一纵向移动机构3均为滑台气缸。
优选的,所述爪锚钩12上设置圆孔16,用于固定所述夹取针11。夹取针11上下移动时,可以穿过爪锚钩12上的圆孔16,圆孔16对夹取针11起到周向限位作用。本实施例中,所述夹取针11和爪锚钩12数量均为四个。
工作原理:使用时,控制器启动横向移动机构2,第一滑动部22在第一支撑部21上滑动,带动第一纵向移动机构3整体左右移动,直至取苗爪机构1位于钵苗正上方时,控制器控制第一纵向移动机构3上下运动,带动第二纵向移动机构4整体上下移动,从而实现取苗爪机构1的上下移动,第二纵向移动机构4启动,活塞杆42进行上下往复运动,移动台14随活塞杆42上下移动,即夹取针11进行上下移动,直至夹取针11插入钵苗基土中,向上运动时,爪锚钩12包裹在钵苗基土中,可以防止破坏,避免幼苗损坏。对钵苗进行夹取之前,识别单元对钵苗进行拍照,检测到的图像信号输送至控制器,控制判断确认良苗、病苗、死苗、空苗的情况,若是良苗则进行夹取,若是病苗、死苗或空苗则不进行夹取动作,减少多余动作,提高工作效率,整体智能化程度高。
以上所述,仅是本发明较佳实施例而已,并非对本发明的技术范围作任何限制,故凡是依据本发明的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- 一种下压式取苗全自动穴盘苗移栽机的送苗取苗投苗装置
- 一种钵苗移栽机取苗机构移动式取苗臂