一种可自定位爪极式步进电机及其组装方法
文献发布时间:2023-06-19 18:25:54
【技术领域】
本发明涉及步进电机技术领域,尤其是一种可自定位爪极式步进电机及其组装方法。
【背景技术】
随着永磁材料、特别是高磁能积稀土材料利用技术的发展,极大地促进了以永磁激磁取代电激磁电机技术的发展。由此,各种体积小、质量轻、且高效节能的永磁电机应运而生。其中的永磁式爪极步进电机,由于在转子上增加了永磁体、省去了电磁线圈、碳刷及滑环结构,带来了结构简单,控制功率小,断电情况下有定位力矩的功能优势,在办公自动化和工业自动控制领域中获得广泛应用。
然而,现阶段爪极式步进电机中的爪极相对较小,使得爪极与转子本体之间的励磁效果不佳,导致电机存在运行不平稳和运行效率低的问题;另外电机中爪极之间存有较大的间隙,因而漏磁也较大,这在一定程度上会降低气隙磁通的有效利用率,从而导致影响电机的工作效率。
为此,本发明即针对上述问题而研究提出。
【发明内容】
本发明目的是克服了现有技术的不足,提供一种可自定位爪极式步进电机,可以改善现有技术存在的问题,具有运行平稳可靠,运行效率高的特点。
本发明是通过以下技术方案实现的:
一种可自定位爪极式步进电机,包括转子组件和设在转子组件外侧的定子组件;所述转子组件包括转子本体6;所述定子组件包括机壳1和依次装配在机壳1内的下线圈骨架2、中间磁板3、上线圈骨架4及上磁板5,所述机壳1内底上呈圆周间隔地分布有若干个向中间磁板3方向延伸的机壳爪极11,所述上磁板5上呈圆周间隔地分布有若干个向中间磁板3方向延伸的磁板爪极51,所述中间磁板3上分别朝向机壳1内底和上磁板5呈圆周间隔地分布有若干个中下爪极31和中上爪极32,且每一所述中下爪极31与每一所述机壳爪极11错位,相邻两所述机壳爪极11之间形成有供中下爪极31进入的下端空间12,相邻两所述中下爪极31之间形成有供机壳爪极11进入的中下空间311;每一所述中上爪极32与每一所述磁板爪极51错位,相邻两所述中上爪极32之间形成有供磁板爪极51进入的中上空间321,相邻两所述磁板爪极51之间形成有供中上爪极32进入的磁板空间52;所述机壳爪极11、中下爪极31、中上爪极32和磁板爪极51分别与转子本体6外侧面相对的内侧面的面积相等,且所述机壳爪极11内侧面的面积与转子本体6外侧面的面积比满足S
如上所述一种可自定位爪极式步进电机,所述机壳爪极11与中下爪极31之间周向的间隙和/或所述中上爪极32和磁板爪极51之间周向的间隙满足0≤α≤0.5mm。
如上所述一种可自定位爪极式步进电机,所述机壳爪极11与中下爪极31之间周向的间隙和/或所述中上爪极32和磁板爪极51之间周向的间隙α=0.32mm。
如上所述一种可自定位爪极式步进电机,所述机壳爪极11、中下爪极31、中上爪极32和磁板爪极51的数量相等且为偶数个。
如上所述一种可自定位爪极式步进电机,所述机壳爪极11内侧面的面积满足S
如上所述一种可自定位爪极式步进电机,所述机壳爪极11内侧面的面积S
如上所述一种可自定位爪极式步进电机,所述机壳爪极11呈上窄下宽设置,且所述机壳爪极11上端宽度为1.6~2mm、下端宽度为2.6~3mm、高为3.6~4mm。
如上所述一种可自定位爪极式步进电机,所述机壳爪极11上端宽度为1.9mm、下端宽度为2.96mm、高为3.86mm。
如上所述一种可自定位爪极式步进电机,所述机壳1内底上的若干个机壳爪极11围成有供转子本体6安装且呈圆形的安装空间13,所述安装空间13内直径为12~13mm,且所述转子本体6外直径小于安装空间13内直径。
如上所述一种可自定位爪极式步进电机,所述转子本体6由铁氧体注塑制成。
本发明一种可自定位爪极式步进电机的组装方法,采用如上所述一种可自定位爪极式步进电机,所述转子本体6外径为12.2mm,包括如下步骤:
a、组装定子组件,将下线圈骨架2、中间磁板3、上线圈骨架4及上磁板5按顺序依次组装于机壳1内,所述中下爪极31与机壳爪极11交错咬合以使若干中下爪极31和机壳爪极11的内侧壁围成下安装空间,所述下安装空间内直径为12.6mm,所述中上爪极32与磁板爪极51交错咬合以使若干中上爪极32和磁板爪极51的内侧壁围成与下安装空间相通的上安装空间,所述上安装空间内直径为12.6mm;
b、组装转子本体,将所述转子本体6放置于上安装空间和下安装空间内,且所述转子本体6外侧壁与上安装空间内侧壁之间的间隙差为0.4mm,所述上安装空间和下安装空间内侧壁限制转子本体6相对机壳1径向运动、机壳1底壁限制转子本体6相对机壳1轴向向下运动,进而实现转子本体6的自定位组装。
与现有技术相比较,本发明具有如下优点:
1、本发明所述机壳爪极、中下爪极、中上爪极和磁板爪极分别与转子本体外侧面相对的内侧面的面积相等,且所述机壳爪极内侧面的面积与转子本体外侧面的面积比满足S
2、所述机壳爪极与中下爪极之间周向的间隙和/或所述中上爪极和磁板爪极之间周向的间隙满足0≤α≤0.5mm,有利于减少漏磁,提高电机的工作效率。
3、所述转子本体为铁氧体材料制成,能够降低制造成本。
4、本发明一种可自定位爪极式步进电机的组装方法,可实现对转子本体自动位组装,具有组装步骤少和组装简便的特点,另外采用本发明组装方法组装出来的步进电机具有运行平稳可靠,运行效率高的特点。
【附图说明】
下面结合附图对本发明的具体实施方式作进一步详细说明,其中:
图1为本发明的剖视图。
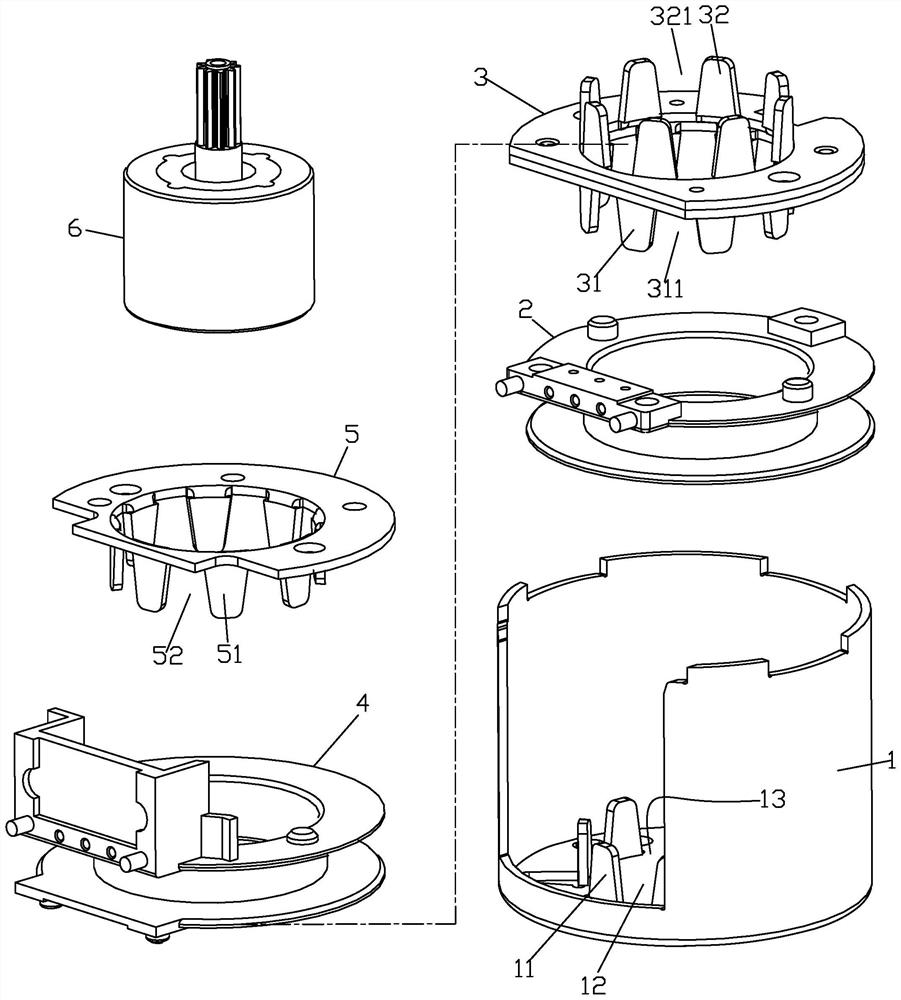
图2为本发明的爆炸图。
图3为本发明的机壳的剖视图。
图4为本发明的机壳爪极的结构示意图。
【具体实施方式】
下面结合附图1-4对本发明的实施方式作详细说明。
如图1-4所示,本发明一种可自定位爪极式步进电机,包括转子组件和设在转子组件外侧的定子组件;所述转子组件包括转子本体6;所述定子组件包括机壳1和依次装配在机壳1内的下线圈骨架2、中间磁板3、上线圈骨架4及上磁板5,所述机壳1内底上呈圆周间隔地分布有若干个向中间磁板3方向延伸的机壳爪极11,所述上磁板5上呈圆周间隔地分布有若干个向中间磁板3方向延伸的磁板爪极51,所述中间磁板3上分别朝向机壳1内底和上磁板5呈圆周间隔地分布有若干个中下爪极31和中上爪极32,且每一所述中下爪极31与每一所述机壳爪极11错位,相邻两所述机壳爪极11之间形成有供中下爪极31进入的下端空间12,相邻两所述中下爪极31之间形成有供机壳爪极11进入的中下空间311;每一所述中上爪极32与每一所述磁板爪极51错位,相邻两所述中上爪极32之间形成有供磁板爪极51进入的中上空间321,相邻两所述磁板爪极51之间形成有供中上爪极32进入的磁板空间52;所述机壳爪极11、中下爪极31、中上爪极32和磁板爪极51分别与转子本体6外侧面相对的内侧面的面积相等,且所述机壳爪极11内侧面的面积与转子本体6外侧面的面积比满足S
所述机壳爪极11与中下爪极31之间周向的间隙和/或所述中上爪极32和磁板爪极51之间周向的间隙满足0≤α≤0.5mm,有利于减少漏磁,提高电机的工作效率。
优选地,所述机壳爪极11与中下爪极31之间周向的间隙和/或所述中上爪极32和磁板爪极51之间周向的间隙α=0.32mm。
所述机壳爪极11、中下爪极31、中上爪极32和磁板爪极51的数量相等且为偶数个。例如机壳爪极11的数量为6个或8个或10个等,进一步增大机壳爪极与转子本体之间的励磁,提高电机工作效率。
为了增大机壳爪极与转子本体之间的励磁,提高电机工作效率,所述机壳爪极11内侧面的面积满足S
优选地,所述机壳爪极11内侧面的面积S
为了增大机壳爪极与转子本体之间的励磁,提高电机工作效率,所述机壳爪极11呈上窄下宽设置,且所述机壳爪极11上端宽度为1.6~2mm、下端宽度为2.6~3mm、高为3.6~4mm。
优选地,所述机壳爪极11上端宽度为1.9mm、下端宽度为2.96mm、高为3.86mm。
为了使得电机结构更加稳定,所述机壳1内底上的若干个机壳爪极11围成有供转子本体6安装且呈圆形的安装空间13,所述安装空间13内直径为12~13mm,且所述转子本体6外直径小于安装空间13内直径。优选地,所述安装空间13内直径为12.6mm。其中所述中间磁板3通孔和上磁板5通孔的内直径与安装空间13内直径相等。
为了降低制造成本,所述转子本体6由铁氧体注塑制成。
本发明一种可自定位爪极式步进电机的组装方法,采用如上所述一种可自定位爪极式步进电机,所述转子本体6外径为12.2mm,包括如下步骤:
a、组装定子组件,将下线圈骨架2、中间磁板3、上线圈骨架4及上磁板5按顺序依次组装于机壳1内,所述中下爪极31与机壳爪极11交错咬合以使若干中下爪极31和机壳爪极11的内侧壁围成下安装空间,所述下安装空间内直径为12.6mm,所述中上爪极32与磁板爪极51交错咬合以使若干中上爪极32和磁板爪极51的内侧壁围成与下安装空间相通的上安装空间,所述上安装空间内直径为12.6mm;
b、组装转子本体,将所述转子本体6放置于上安装空间和下安装空间内,且所述转子本体6外侧壁与上安装空间内侧壁之间的间隙差为0.4mm,所述上安装空间和下安装空间内侧壁限制转子本体6相对机壳1径向运动、机壳1底壁限制转子本体6相对机壳1轴向向下运动,进而实现转子本体6的自定位组装。本发明一种可自定位爪极式步进电机的组装方法,可实现对转子本体自动位组装,具有组装步骤少和组装简便的特点,另外采用本发明组装方法组装出来的步进电机具有运行平稳可靠,运行效率高的特点。
在发明中,所述转子本体6外侧壁与上安装空间内侧壁之间的间隙为0.2mm。
- 一种铝电解槽组装式节能阳极钢爪及其装配方法
- 一种双端定位导杆式浮子液位计及组装方法
- 一种永磁式爪极型步进电机输出轴减速装置自动组装机
- 一种永磁式爪极型步进电机输出轴减速装置自动组装机