一种自适应越障三维雷达检测小车
文献发布时间:2023-06-19 18:25:54
技术领域
本发明涉及智能检测装备技术领域,具体涉及一种用于地下障碍物、管线等自适应越障三维雷达检测小车。
背景技术
三维探地雷达是一种利用电磁波来探测地下浅层隐蔽目标的有效工具。探地雷达系统通过发射天线发射一定频段的电磁波,电磁波在地下媒质传播过程中当遇到两种媒质存在电磁特性差异时就会产生反射和折射,而反射信号最终被接收天线接收。系统根据接收信号的时延,形状及频谱特性等参数来估计目标深度、媒质层厚度以及介电常数等信息。在数据处理的基础上,应用合理的成像方法和图像处理技术,对地下目标进行成像处理,以实现对地下目标真实和直观的再现。
三维探地雷达整体尺寸一般较大,长度大于1m,由阵列式多个通道同时发射信号,生成地层三维切片,进而分析地层中的障碍物和管线。探地雷达检测时需贴近地面,距离地面高度3~5cm;常规的三维探地雷达主要用于道路病害检测,采用工程车拖拽雷达进行检测。在雷达上安装从动轮,工程车牵引式行进。因为城市道路路面较为平整,雷达设备一般不考虑越障。
随着城市更新、市政道路改扩建、建筑工程基坑开挖等项目的发展,地下障碍物和管线探测方面有大量的技术需求,部分检测区域涉及人行道、地势不平坦的区域,现有的三维雷达需通过人工进行越障,大大降低了检测的效率;另外工程车牵引式设备在狭窄区域无法通过。
由此可见,现急需一种能够自行越障的三维探地雷达检测小车来提高检测的效率为本领域需解决的问题。
发明内容
针对于现有三维探地雷达存在无法进行自动越障而降低检测效率的技术问题,本发明的目的在于提供一种自适应越障三维雷达检测小车,其能够自适应抬升跨越障碍,大大提高了检测效率,很好地克服了现有技术所存在的问题。
为了达到上述目的,本发明提供的一种自适应越障三维雷达检测小车,包括车体,提升系统,三维雷达以及控制系统;所述三维雷达与车体配合连接;所述提升系统对称设置于车体上并与三维雷达配合连接,通过提升系统可将三维雷达相对于车体进行上升/下降;所述控制系统设置于车体上并分别控制连接三维雷达和提升系统。
进一步地,所述车体包括车架以及移动机构;所述移动机构对称设置于车架底部,可带动车架进行移动。
进一步地,所述车架是由四个连接架相互连接构成为矩形框架;所述连接架分别是由第一连接杆和第二连接杆配合连接,所述第一连接杆的杆径小于第二连接杆的杆径,能够将第一连接杆收缩至第二连接杆内部。
进一步地,所述移动机构包括四组移动组件并对称分布于车架底部;所述移动组件包括电机和车轮;所述车轮设置于车架底部,所述电机驱动连接车轮。
进一步地,所述提升机构包括顶升系统;所述顶升系统沿三维雷达宽度方向左右对称,分布在三维雷达两侧,分布于三维雷达两侧的顶升系统顶部通过横梁进行连接设置。
进一步地,所述横梁包括第一横梁和第二横梁;所述第一横梁管径小于第二横梁,所述第一横梁能够收缩到第二横梁中。
进一步地,所述顶升系统包括三角形支架、底座支架、电磁推杆,固定块、滑块以及顶帽;所述底座支架为电磁推杆的底座,与电磁推杆配合连接并固定于车架上,为电磁推杆提供顶升力;所述顶帽安装在电磁推杆的顶部,侧边与三角形支架固定连接;所述三角形支架通过固定块与三维探地雷达连接;所述滑块安装在底座支架上并与固定块配合连接,固定块可沿着滑块进行上下移动;所述电磁推杆进行顶升时,三角形支架可带动三维雷达通过固定块沿着滑块进行上升。
进一步地,所述提升机构包括起吊系统,所述起吊系统沿三维雷达长度方向左右对称分布在三维雷达两侧,分布在三维雷达两侧的起吊系统顶部通过起吊横梁进行连接设置,起吊横梁通过若干连接梁与车体进行连接。
进一步地,所述起吊横梁包括第一起吊横梁和第二起吊横梁;所述第一起吊横梁管径小于第二起吊横梁,所述第一起吊横梁收缩到第二起吊横梁中。
进一步地,所述起吊系统包括卷扬电机、定滑轮、固定支架、滑动支架;
所述固定支架对称设置于三维雷达上,所述滑动支架对应竖直设置于起吊梁的连接梁上,所述固定支架可与滑动支架配合,可沿着滑动支架进行上下移动;所述卷扬电机对称设置于车体两侧,所述定滑轮安装在起吊横梁上,所述定滑轮所配合设置的吊绳通过定滑轮后一端与三维雷达连接,另一端与卷扬电机连接;所述卷扬电机驱动吊绳带动三维雷达通过固定块沿着滑动支架进行上下的移动。
本发明提供的自适应越障三维雷达检测小车,其通过在检测小车上配合设置顶升机构或起吊机构对雷达进行抬升,能够使得三维雷达检测小车自适应跨越障碍,大大提高了检测效率。
附图说明
以下结合附图和具体实施方式来进一步说明本发明。
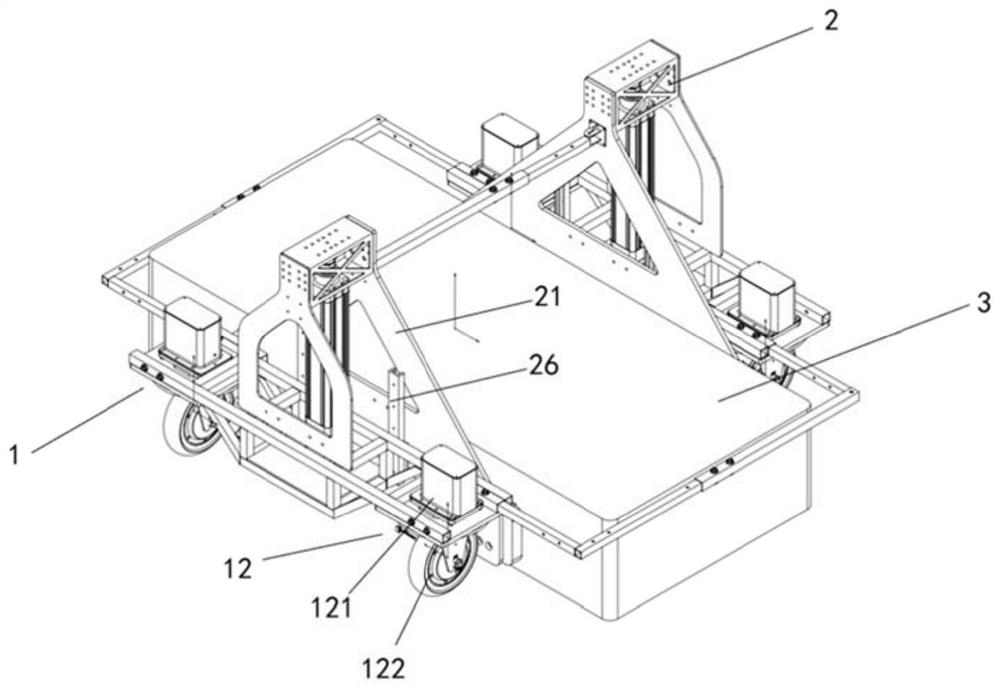
图1为本含顶升结构的自适应越障三维雷达检测小车的结构示意图;
图2为本含顶升结构的自适应越障三维雷达检测小车的俯视图;
图3为本含顶升结构的自适应越障三维雷达检测小车的主视图;
图4为本含顶升结构的自适应越障三维雷达检测小车的侧视图;
图5为本含起吊结构的自适应越障三维雷达检测小车的结构示意图;
图6为本自适应越障三维雷达检测小车中起吊结构的示意图;
图7为本含起吊结构的自适应越障三维雷达检测小车的俯视图;
图8为本含起吊结构的自适应越障三维雷达检测小车的侧视图;
图9本自适应越障三维雷达检测小车的工作方法流程图。
下面为附图中的部件标注说明:
1.车体11.车架12.移动机构121.电机122.车轮2.顶升系统21.三角形支架22.底座支架23.电磁推杆24.横梁241.左横梁242.右横梁25.固定块26.滑块27.顶帽3.三维雷达4.起吊系统41.起吊横梁42.卷扬电机43.定滑轮44.吊绳45.固定支架46.滑动支架5.控制系统。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明。
针对于现有三维探地雷达存在无法进行自动越障而降低检测效率的技术问题,基于此技术问题,本方案提供了一种自适应越障三维雷达检测小车,其通过顶升机构或龙门架起吊机构进行抬升,能够使得三维雷达检测小车自适应跨越障碍,大大提高了检测效率。
参见图1-图4,本方案提供的自适应越障三维雷达检测小车包括车体1,提升系统,三维雷达3以及控制系统5。
控制系统5为小车的供能和控制中心,其设置于车体1上,并分别与提升系统,三维雷达3连接,分别控制以及为提升系统,三维雷达3功能。
三维雷达3为地下障碍、管线主要检测设备,为矩形箱体结构,检测时需贴近地面(3~5cm),越障时,通过提升系统抬升三维雷达,使得三维雷达3离地高度达到10cm~15cm。
车体1用于为三维雷达3提供移动机构,车体1包括车架11以及移动机构12。
车架11是由四个连接架相互连接构成为矩形框架,用于安置三维雷达,将三维雷达安置于框架中并通过连接件将车架11与三维雷达3进行连接。
每个连接架分别是由第一连接杆和第二连接杆配合连接,其中,第一连接杆的杆径小于第二连接杆的杆径,能够将第一连接杆收缩至第二连接杆内部,方便运输。
移动机构12包括四组移动组件,对称分布于车架11底部,用于驱动车架11进行行走,移动组件包括电机121和车轮122。
车轮122设置于车架11底部,电机121驱动连接车轮122,用于控制车轮122转向和转速,并且电机121将车轮122转速信息传输至三维雷达3,三维雷达3根据车轮122转速调整雷达波形出图速率(三维雷达出图速率与车轮转速正相关,且车轮速率不宜大于0.3m/s)。
本方案中优选采用四轮四转结构,能够原地转向,操控灵活;另外,运输时车架11可伸缩,整体车架11体积小,便于运输。
提升机构包括顶升系统2,其中,顶升系统2沿三维雷达3宽度方向左右对称,分布在三维雷达3两侧,三维雷达3两侧的顶升系统2顶部通过横梁24进行连接设置。
横梁24包括第一横梁241和第二横梁242;其中,第一横梁241管径直径略小于第二横梁242,车架11运输时,第一横梁241收缩到第二横梁242中,减小设备尺寸。
顶升系统2包括三角形支架21、底座支架22、电磁推杆23,固定块25,滑块26以及顶帽27。
底座支架22为电磁推杆23的底座,与电磁推杆23配合连接并固定于车架11上,为电磁推杆23提供顶升力。
顶帽27安装在电磁推杆23的顶部,侧边与三角形支架21固定连接;三角形支架21通过固定块25与三维探地雷达3连接;同时,固定块25上设有凹槽,可与滑块26进行配合连接。
滑块26安装在底座支架22上,为凸起轨道结构,与固定块25上的凹槽配合连接,固定块25可沿着滑块26进行上下移动。
当三维雷达3需要抬升时,两个电磁推杆23需同步工作,且顶升速率相同,当电磁推杆23进行顶升时,三角形支架21可带动三维雷达3通过固定块25沿着滑块26进行上升,使得三维雷达3离地高度达到10cm~15cm;反之,则带动三维雷达3通过固定块25沿着滑块26进行下降。
另外,参见图5-图8,本方案中的提升系统也可采用起吊系统4,起吊系统4沿三维雷达3长度方向左右对称,分布在三维雷达3两侧,三维雷达3两侧的起吊系统4顶部通过起吊横梁41进行连接设置,起吊横梁41通过若干连接梁与车体1进行连接。
起吊横梁41顶部设有若干连接孔,可通过连接孔与目标柱体进行连接。
进一步地,起吊横梁41包括第一起吊横梁和第二起吊横梁;其中,第一起吊横梁管径直径略小于第二起吊横梁,车架11运输时,第一起吊横梁收缩到第二起吊横梁中,减小设备尺寸。
起吊系统包括卷扬电机42、定滑轮43、吊绳44、固定支架45、滑动支架46。
固定支架45对称设置于三维雷达3上,滑动支架46对应竖直设置于起吊横梁41的连接梁上,固定支架45可与滑动支架46配合,可沿着滑动支架46进行上下移动。
卷扬电机42对称设置于车体1两侧,定滑轮43安装在起吊横梁41上,定滑轮43所配合设置的吊绳44通过定滑轮43后一端与三维雷达3连接,另一端与卷扬电机42连接。
当三维雷达3需要上升时,控制系统5同时控制2个卷扬电机进行转动,使得三维雷达3两端同步上升。
在卷扬电机42转动过程中,卷扬电机42这一侧的吊绳44拉动三维雷达3一端的吊绳,此时三维雷达3通过固定块45沿着滑动支架46并相对于起吊系统4进行提升;反之,则使得三维雷达3通过固定块45沿着滑动支架46并相对于起吊系统4进行下降。
这里顶升机构中是采用顶升系统2还是起吊系统4,本方案中不做限定,具体的采用可根据实际情况而定。
以下举例说明本方案在具体应用时的操作过程,但这里需要说明的是,以下方案只是本方案一种实施例的举例说明,并不对本方案构成限定,具体的参见图9:
(1)将三维雷达3通过车体1的车轮122移动至测线处;
(2)通过控制系统5控制提升机构,使得三维雷达3下降后贴近地面;
(3)操作人员判断前方是否有障碍物,若有,则控制提升机构,使得三维雷达3上升后远离地面,既而控制小车跨越障碍;若无障碍,则继续贴面进行检测;
(4)完成一组测线检测。
综上所述,本发明提供的自适应越障三维雷达检测小车,能够通过顶升机构或龙门架起吊机构自适应抬升跨越障碍,自主行进,大大提高了检测效率。
其次,运输时车架收缩,大大减小运输体积,该小车不同路况适应性强,拓宽了三维雷达的应用范围。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种适用于隧道检测用的姿态自适应超声波雷达小车
- 基于车载激光雷达点云的三维目标自适应检测方法及系统