一种轻型钎探自动化设备及数据处理方法
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及钎探工程技术领域,特别是提供了一种轻型钎探自动化设备及数据处理方法。
背景技术
钎探是一种应用广泛的土层软硬度探察方法,一般将标志刻度的标准直径钢钎,采用机械或人工的方式,使用标定重量的重锤,垂直击打钢钎进入土层;根据钢钎进入待探测土层所需的重锤数,探测土层内隐蔽构造情况或粗略估算土层的容许承载力。
在轻型钎探作业现场,操作人员将标志刻度的标准直径钢钎,长度2.1m,每300mm作一刻度,采用机械或人工的方式,使用标定重量的重锤,将钢钎打入土层中,人工计数并记录每打入300mm的锤击数,据此可判断土质的软硬情况。现场操作存在如下问题:钎探时,钎探数据采集人工完成,必须有一专人计数和记录,耗费人力,人工观察钢钎下落距离并计数,容易出现漏数或多数,导致因人为因素导致锤击次数数据、钢钎插入地层深度数据不准确;并且,记录的数据无法实时输送、显示、存储和处理等,无法满足施工作业信息处理现代化需要。
发明内容
针对上述技术问题,本发明提供了一种轻型钎探自动化设备及数据处理方法,以提高了钎探作业数据采集的自动化程度和精确度。
为了达到上述目的,第一方面,本发明提供了一种轻型钎探自动化设备,包括支架、触探装置和计数/测距装置;所述触探装置包括导向杆、触探杆、重锤和锤击驱动机构;所述导向杆固定设置在支架上并且朝下伸出,所述触探杆与导向杆同轴布置并且上端滑动自由的套设在导向杆下端,触探杆下端设置有探头,所述重锤滑动自由的套设在导向杆上,触探杆的上端设置有锤垫,所述锤击驱动机构用于驱动重锤升高后自由下落而锤重锤垫,以驱动触探杆钻入地层;所述计数/测距装置包括计数信号收发模块、测距信号收发模块和中控模块;所述计数信号收发模块设置在支架外侧并与重锤升降运动轨迹中间部分横向相对布置,在重锤升降运动中所述计数信号收发模块发射和接收被移动至轨迹中间的重锤反射的计数信号,以计量重锤升降次数;所述触探杆固定设置有测距标体,所述测距信号收发模块设置在支架顶部并与测距标体竖向相对布置,测距信号收发模块用于发射和接收被测距标体反射的测距信号,以得到触探杆钻入地层深度;所述中控模块与所述计数信号收发模块、测距信号收发模块连接,中控模块用于计数信号收发模块、测距信号收发模块输送来的信息的实时收集及处理,并输送至显示器、储存器以及远程上位机。
与现有技术相比,本发明所提供的轻型钎探自动化设备的计数/测距装置设置了与中控模块连接的红外线收发模块和测距信号收发模块,在锤击触探杆钻入地层过程中,计数装置进行重锤升降次数的实时计量,测距装置进行触探杆钻入地层深度的实时计量,通过中控模块实时接收及处理重锤升降次数信息和触探杆钻入地层深度信息,并输送至显示器、储存器以及远程上位机,能够实现钎探过程的信息自动化实时采集、显示和存储,提高了钎探作业精确度减少人为因素造成的误差,采集过程自动化完成,减少操作用工数量。同时,触探装置通过导向杆与触探杆滑动套设配合,实现在锤击钻入地层过程中中对触探杆的扶正,提高钻入精度。
可选地,所述计数信号收发模块为红外线收发一体器,在重锤升降过程中所述红外线收发一体器发射和接收被重锤反射的红外线信号,以计量所述重锤升降次数。
可选地,所述红外线收发一体器的发射端和接收端设置在重锤同一侧的支架上,当所述重锤移动至与红外线收发一体器高度一致时,所述发射端发射的红外线被重锤反射而被接收端接收,以计量重锤升降次数。
可选地,所述中控模块控制所述测距信号收发模块在重锤离开锤垫期间发射和接收反射的测距信号。
可选地,所述测距信号收发模块为激光收发一体器,所述激光收发一体器设置在支架顶部并与测距标体上下相对布置,用于发射和接收被测距标体反射的激光信号,以得到所述触探杆钻入地层的深度。
可选地,所述测距标体设置有超出所述重锤的竖向投影范围的测距激光反射区,所述激光收发一体器的激光发射端及接收端与所述激光反射区上下相对布置。
可选地,所述中控模块用于重锤升降次数信息和触探杆钻入地层深度信息的实时接收及处理,以得到重锤锤击次数信息和触探杆钻入地层深度信息。
为了达到上述目的,第二方面,本发明提供了一种轻型钎探自动化设备数据处理方法,用于上述的轻型钎探自动化设备,包括:计数信号收发模块得到重锤升降次数信息并输送至中控模块;测距信号收发模块得到触探杆钻入地层深度信息并输送至中控模块;中控模块结合计数信号收发模块以及测距信号收发模块,由重锤升降次数信息计算出锤击次数信息;中控模块将重锤锤击次数信息和触探杆钻入地层深度信息发送至信息显示器、储存器和远程上位终端。
可选地,所述中控模块设置有数据转化单元,所述数据处理方法包括:所述中控模块监测触探杆钻入地层深度阶梯变化;所述数据转化单元通过公式计算在深度阶梯变化的时间段内重锤锤击次数:重锤锤击次数=重锤经过运动轨迹中间次数÷2。
可选地,所述中控模块包括数据处理单元;所述数据处理方法包括:实时接收重锤锤击次数信息和触探杆钻入地层深度信息;生成以重锤锤击次数为x轴数据、触探杆钻入地层深度为y轴数据的钎探曲线信息;将钎探曲线信息与设定值比较,判断地层软硬度,得出钎探的地层软硬度信息。
与现有技术相比,本发明所提供的轻型钎探自动化设备数据处理方法,通过中控模块实时接收及处理重锤升降次数信息和触探杆钻入地层深度信息,得出重锤升降次数信息和触探杆钻入地层深度信息,提高了钎探作业信息采集精确度,减少人为因素造成的误差,并能够实时进行电子化信息的显示、存储和远程传输等,适合与施工作业信息处理现代化需要。
附图说明
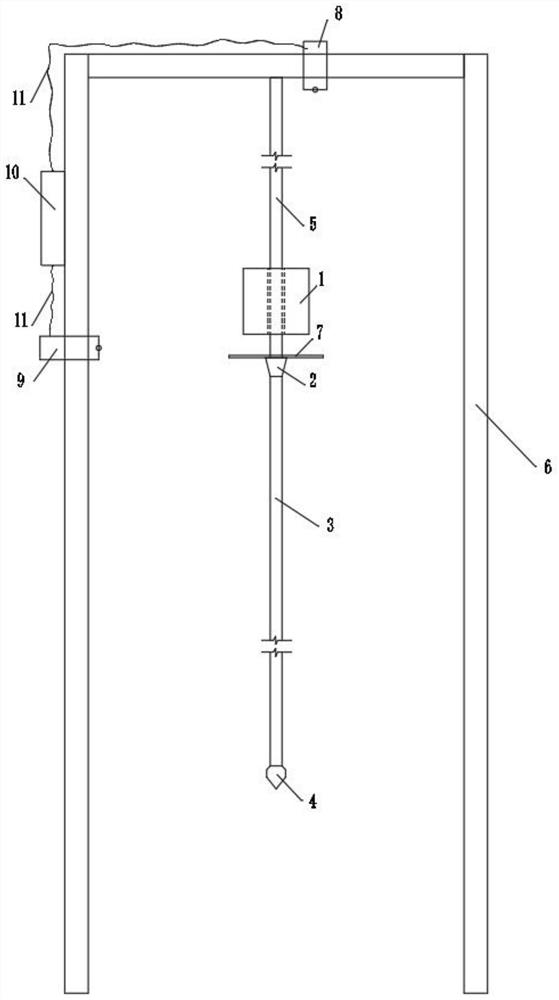
图1为本发明所提供的轻型钎探自动化设备结构示意图的前视图。
图2为所提供的轻型钎探自动化设备结构示意图的侧视图。
图3为计数/测距装置结构框图。
图4为轻型钎探自动化设备数据处理方法流程框图。
图5为数据处理单元数据处理方法流程框图。
图中,1—重锤,2—锤垫,3—触探杆,4—探头,5—导向杆,6—支架,7—测距标体,8—测距信号收发模块,9—计数信号收发模块,10—中控模块,11—通讯/电源线。
具体实施方式
在轻型钎探作业现场,人工观察钢钎下落距离并计数,耗费人力,计数容易出现漏数或多数,导致锤击次数数据、钢钎插入地层深度数据不准确;并且,记录的数据无法实时输送、显示和后处理等处理。
为此,本发明提供了一种轻型钎探自动化设备及数据处理方法,自动化完成重锤锤击次数和触探杆钻入地层的深度等信息的实时输送、显示、存储和后处理等,以提高了钎探作业数据采集的自动化程度和精确度,减少数据过程的人力耗费。
下面结合说明书附图对优选的实施例进行详细介绍,需要说明的是,以下对至少一个示例性实施例的描述实际上仅仅是说明性的,而不作为对本发明及其应用或使用的任何限制。
如图1、图2和图3所示,在一些优选的实施例中,本发明提供的一种轻型钎探自动化设备,触探装置包括导向杆5、触探杆3、重锤1和锤击驱动机构;导向杆5固定设置在支架6上并且朝下伸出,触探杆3与导向杆5同轴布置并且上端滑动自由的套设在导向杆5下端,触探杆3下端设置有探头4,重锤1滑动自由的套设在导向杆5上,触探杆3的上端设置有锤垫2,锤击驱动机构用于驱动重锤1升高后自由下落而锤重锤垫2,以驱动触探杆3钻入地层。触探装置通过导向杆与触探杆滑动套设配合,实现在锤击钻入地层过程中对触探杆的扶正,提高钻入精度,并且不需要人手操作,从而远离升降运动的重锤,提高了作业的安全性,连接结构简单、易于操作。其中的锤击驱动机构可以使用人工拉绳提升重锤升高后释放,或者使用机械自动化设备,如马达、线性缸等设备提升重锤升高后释放,在此不作赘述。
计数/测距装置包括计数信号收发模块9、测距信号收发模块8和中控模块10;计数信号收发模块9设置在支架6外侧并与重锤1升降运动轨迹中间部分横向相对布置,在重锤1升降运动中计数信号收发模块9发射和接收被重锤1反射的计数信号,以计量重锤升降次数;触探杆3固定设置有测距标体7,测距信号收发模块8设置在支架6顶部并与测距标体7竖向相对布置,测距信号收发模块8用于发射和接收被测距标体7反射的测距信号,以得到触探杆钻入地层深度;中控模块10与计数信号收发模块、测距信号收发模块8连接,中控模块10用于信息的实时收集及处理,并输送至显示器、储存器以及远程上位机。在实施过程中,显示器、储存器等采用与中控模块一体化结构的液晶显示器或其他光学显示器,储存器采用SD卡、U盘或硬盘等均可,中控模块设置有远程无线信号发射单元,与远程上位机信号连接,不再赘述。
如图1和图2所示,在一些优选的实施例中,计数信号收发模块9为红外线收发一体器,在重锤1升降过程中红外线收发一体器发射和接收被重锤1反射的红外线信号,以计量重锤升降次数。红外线收发一体器的发射端和接收端设置在重锤1同一侧的支架6上,当重锤1移动至与红外线收发一体器高度一致时,发射端发射的红外线被重锤1反射而被接收端接收,以计量重锤升降次数。在其他的实施例中,计数信号收发模块9还可以使用电磁原理、超声波原理等工业应用计数信号仪器,不作具体限制。
具体的,在设备支架6上,重锤1和测距标体7之间的外侧,加设红外线收发一体器,发射和接收红外线,重锤每次下落和返回原点,发射的红外线被其遮挡并返回由接收端感知,并配合测距模块通过软件算法得出准确的锤击数。
实时锤击次数计量的工作原理:红外线收发一体器发出红外线,在重锤落下和回到原处过程中发射的红外线会被被遮挡,返回的红外线被接收端接收,从而达到重锤升降次数的计数功能。中控模块通过软件算法的调整以精确记录锤击数,传递至显示器、储存器或者远程上位终端。通过计数信号收发模块进行重锤锤击次数的计量,不需要专人计数和记录,避免人为因素造成的漏数和多数,使得锤击次数记录准确,并且实现电子数据的显示、存储和远程管理,易于实现数据处理自动化,提高作业效率。
如图1和图2所示,在一些优选的实施例中,测距信号收发模块8为激光收发一体器,激光收发一体器设置在支架6顶部并与测距标体7上下相对布置,用于发射和接收被测距标体7反射的激光信号,以得到触探杆钻入地层的深度。测距标体7设置有超出重锤1的竖向投影范围的测距激光反射区,激光收发一体器的激光发射端及接收端与激光反射区上下相对布置。在具体实施中,测距信号收发模块8也可以采用超声波测距仪器、磁滞测距仪器等工业常规应用的测距设备,在此不作过多限制。
在一些优选的实施例中,在锤垫上增加一块20cm*20cm的钢板作为测距标体,在其上方的设备横梁上加设激光收发一体器(发射的激光不得被重锤遮挡),通过锤击过程中,测距标体7不断往下运动,测出模块与测距标体7之间的距离与原始距离相比较,达到实时测量每次锤击驱动的触探杆钻入地层深度的功能,利于钎探数据精细化处理。
在一些优选的实施例中,中控模块10控制测距信号收发模块8在重锤1离开锤垫2期间发射和接收反射的测距信号。由于锤击过程不可避免的引起设备的振动,选定这一时间进行上述操作,避开锤击时的振动环境,有利于测距工作的顺利进行,保障测距的精度。
触探杆钻入地层的实时测距工作原理:锤击过程中,通过向激光收发一体器的发射端发射激光,激光射向测距标体,被激光反射区反射,向回传播而被接收端接收,激光收发一体器记录发射时间好接收时间的时间差,基于光速恒定原理,由此时间差计算出激光收发一体器到测距标体的距离,从而得出触探杆钻入地层的深度。这种测距方式,能够实时、精确的得到触探杆钻入地层深度,并实现数据的显示、存储和远程传输,利于准确掌握钎探作业进度。
本发明同时提供了轻型钎探自动化设备数据处理方法,结合图3、图4和图5进行介绍。
如图4所示,一种轻型钎探自动化设备数据处理方法,用于轻型钎探自动化设备,包括:
S10A,计数信号收发模块9得到重锤升降次数信息并输送至中控模块10;
S10B,测距信号收发模块8得到触探杆钻入地层深度信息并输送至中控模块10;
S20,中控模块10结合计数信号收发模块9以及测距信号收发模块8,由重锤升降次数信息计算出锤击次数信息;
S30,中控模块10将重锤锤击次数信息和触探杆钻入地层深度信息发送至信息显示器、储存器和远程上位终端。
结合图5,说明中控模块包括数据处理单元,通过数据处理单元进行数据处理方法的步骤包括:
S50,数据处理单元实时接收重锤锤击次数信息和触探杆钻入地层深度信息;
S60,生成以重锤锤击次数为x轴数据、触探杆钻入地层深度为y轴数据的钎探曲线信息;将钎探曲线信息与设定值比较,判断地层软硬度,得出钎探的地层软硬度信息。
通过上述方法,得出钎探曲线,能够实时、直观的得到钎探地层的软硬程度,并且通过软件分析,得到较为客观的地层软硬度信息,减少人为因素造成的判别不准确、速度慢的问题,利于钎探工作的快速、高质量进行,满足钎探信息自动化的需要。
进一步的,在一些优选的实施例中,在钎触探杆钻入地层300mm过程中,所提供的数据处理单元进行数据处理方法,获得每一次锤击后触探杆钻入地层深度信息,输送至中控模块,以准确掌握每一次锤击所因此触探杆钻入地层的深度,从而精确的把握触探杆所钻入地层的300mm内不同深度处的地层软硬度,使得钎探数据得到细化,更加精确得到地层软硬度信息。而传统方法得到的是300mm内的整体地层软硬深度,在这300mm范围内的地层软硬难度变化则无法得到。
如图1和图3所示,在一些优选的实施例中,中控模块为以单片机为核心处理器的控制模块,其中包括:(a)供电模块既将220V转为5V及12V分别为单片机模块以及7和9供电,(b)单片机核心控制模块既以串口通讯的方式接收采集的数据饼显示到液晶并以无线通讯的方式发送到远程上位机同时储存于本地SD卡,通过这种方式确保数据不会轻易丢失,(c)液晶显示模块用于显示数据,(d)SD卡模块用于本地存储数据,(e)无线模块用于传输数据到远程上位机。
在具体实施中,通讯/电源线11为RS232串口通讯线以及电源线,测距信号收发模块8和技计数信号收发模块9将其所采集的数据信息通过通讯/电源线11以串口通讯的方式传输到中控模块10上,同时中控模块10通过通讯/电源线11为测距信号收发模块8和技计数信号收发模块9供电。
所提供的计数/测距装置,设置测距信号收发模块及计信号收发数模块,并通过RS232串口通讯线将数据传输到单片机核心控制模块,用单片机控制每300mm时自动将锤击数和锤击距离显示到液晶屏上并存储到SD卡中同时通过无线模块发送到远程上位机中以便远程查看。
如图3和图4所示,在一些优选的实施例中,中控模块10设置有数据转化单元,数据转化单元用于重锤升降次数的实时接收及处理,以得到重锤锤击次数。
进一步的,在一些优选的实施例中,数据处理方法包括:中控单元监测触探杆3钻入地层深度阶梯变化;数据转化单元通过公式计算在深度阶梯变化的时间段内重锤锤击次数:重锤锤击次数=重锤经过运动轨迹中间次数÷2。通过这种数据处理方法,能够准确的精重锤升降次数转化得出锤击次数。转化远离,作业开始时,重锤处于低位而被锤垫支撑,然后重锤升高至固定高度、自由落体降落至锤垫,完成一次锤击,这一过程中,计数信号收发模块记录重锤经过运动轨迹中间2次,中控模块进行计算1=2÷2,得到实际发生锤击1次,在整个钎探作业中,中控模块累计上述计算出的锤击次数。
最后,结合图1、图4,所提供的轻型钎探自动化设备的工作过程包括如下步骤:
将重锤1穿入带锤垫2的触探杆3上,将探头4及触探杆3垂直地面放于测试地点,提升重锤1至预定高度,使其自由下落撞击锤垫2,驱动触探杆及前端的探头4钻入地层,记录每灌入30cm的锤击次数,重复上述步骤,直至预定试验深度。
在锤击触探杆钻入地层的过程中,通过计数/测距装置进行重锤锤击次数、触探杆钻入地层深度的信息采集处理过程如下:
S10A,计数信号收发模块9得到重锤升降次数信息并输送至中控模块10;
S10B,测距信号收发模块8得到触探杆钻入地层深度信息并输送至中控模块10;
S20,中控模块10结合计数信号收发模块9以及测距信号收发模块8,由重锤升降次数信息计算出锤击次数信息;
S30,中控模块10将重锤锤击次数信息和触探杆钻入地层深度信息发送至信息显示器、储存器和远程上位终端。
所提供的轻型钎探自动化设备及数据处理方法,通过中控模块实时接收及处理重锤升降次数信息和触探杆钻入地层深度信息,得出重锤升降次数信息和触探杆钻入地层深度信息,提高了钎探作业信息采集精确度,减少人为因素造成的误差,适合与施工作业信息处理现代化需要。
以上实施例仅用以说明本发明的技术方案而非对其限制;尽管参照较佳实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者对部分技术特征进行等同替换;而不脱离本发明技术方案的精神,其均应涵盖在本发明请求保护的技术方案范围当中。
- 一种DPI设备的数据处理方法及相关的DPI设备
- 一种数据处理方法、装置、网络侧设备及终端设备
- 一种数据处理方法、数据处理装置、计算机设备及可读存储介质
- 一种基于用户数据资源的欠款数据处理方法及终端设备
- 一种数据处理方法及数据处理设备
- 一种辅助确定暗井位置的钎探设备及暗井钎探方法
- 一种土层全自动钎探方法及钎探设备