康复训练装置及康复机器人
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及康复训练技术领域,尤其涉及一种康复训练装置及康复机器人。
背景技术
脑卒中作为最常见的致残疾病之一,其中70%以上的患者伴有偏瘫等后遗症状,需要长期的康复治疗才能回归正常生活。在偏瘫患者的上肢功能康复中,又以上肢功能的康复最为困难。上肢功能障碍不仅影响了患者的正常运动和生活,也给患者带来了一定的心理压力和家庭压力。这类患者除了前期治疗外,日常的康复训练对于上肢运动功能的恢复起到十分重要的作用。运动治疗是主要的康复方法,主要解决患者上肢肌肉乏力等问题。临床上,常用的运动物理康复治疗都需要医疗人员徒手挥着借助医疗器械进行操作。
近些年来市面上出现了一种新型肘关节训练机器人,对肘关节进行康复训练。但是由于人体结构原因或者训练设备结构的原因,在运动过程中往往会造成肘关节的转动点和训练设备的转动点出现偏移,此时继续进行锻炼会使得训练者的小臂转动点偏离肘关节的转动点,逐渐向设备的转动点靠近,会造成不适感,且在一定的情况下容易对训练者的手臂造成二次伤害。
因此,需要设计一种便于使用、且安全的康复训练装置及康复机器人。
发明内容
本发明的目的在于提供一种康复训练装置及康复机器人,该康复训练装置用以改善现有技术中关节训练设备容易对手臂造成伤害、舒适感低的问题。
为实现上述目的,本发明提供了一种康复训练装置,包括壳体;
第一臂托,所述第一臂托固定于所述壳体,被设置为放置目标对象的大臂并使得所述大臂保持一方向;
手臂杆,所述手臂杆通过旋转轴旋转连接所述壳体,所述手臂杆的自由端上设置有滑槽;
第二臂托,所述第二臂托上连接有与所述滑槽适配的滑块且所述滑块被设置为在所述滑槽上滑动,所述第二臂托被设置为放置目标对象的小臂;以及,
驱动组件,所述驱动组件连接于与所述手臂杆的自由端相对于所述旋转轴的另一端,带动所述手臂杆围绕所述旋转轴相对于所述方向旋转一角度;所述第二臂托沿着所述手臂杆滑动,使得所述手臂杆在旋转时所述第二臂托进行适应性调整。
本发明的康复训练装置的有益效果在于:通过所述第一臂托对目标对象的大臂进行固定,通过将所述手臂杆通过旋转轴旋转连接于所述壳体,并将所述驱动组件与所述手臂杆连接,使得所述驱动组件能够带动所述手臂杆绕所述壳体进行摆动,通过所述第二臂托能够对所述目标对象的小臂进行支撑,并在所述第二臂托上设置滑块,在所述手臂杆上设置滑槽,使得所述第二臂托在所述手臂杆上的位置可以被调整,在所述驱动组件带动所述手臂杆转动的时候通过所述第二臂托对所述目标对象的小臂相对于所述第一臂托上的大臂进行位置上的自适应调整,使得小臂的转动点能够根据小臂的受力情况通过滑槽和滑块的作用进行自适应调整,不会对手臂造成伤害,保证肘部训练时的舒适度。
在一种可行的实施例中,所述第二臂托可滑动的设置于所述手臂杆。其有益效果在于:将所述第二臂托转动设置于所述手臂杆,使得所述目标对象的小臂相对于所述手臂杆出现转动的情况时,对所述第二臂托进行同步转动,能够保证所述目标对象的小臂与所述第二臂托的贴合度,使得目标对象的小臂始终能够得到所述第二臂托的支撑,同时将所述第二臂托滑动设置于所述手臂杆,使得所述目标对象的小臂在转动过程中相对于其他状态时发生位置偏移时,能够通过滑动的形式抵消所述目标对象受到的偏移作用力,且所述第二臂托滑动的力产生于转动过程中造成的偏移的力,无需所述目标对象施加主动力;实现自适应调整,使用方便。
在一种可行的实施例中,还包括旋转组件,所述第二臂托设置有通孔;所述旋转组件包括端头和与端头连接的螺纹杆,所述螺纹杆穿过所述通孔并与所述滑块螺纹连接;所述端头卡在所述第二臂托的通孔上。其有益效果在于:这样设置一方面便于所述第二臂托与所述滑块的可拆卸连接,另一方面便于所述第二臂托可转动的设置于所述滑块上。
在一种可行的实施例中,在所述通孔与所述螺纹杆的间隙设置有轴套或隔离柱。其有益效果在于:这样设置便于降低所述第二臂托与所述旋转组件之间的摩擦系数,便于所述第二臂托的转动。
在一种可行的实施例中,所述第二臂托设置为弧形。其有益效果在于:将所述第二臂托设置为弧形,便于对所述目标对象的手臂进行支撑。
在一种可行的实施例中,所述第二臂托的弧形处的开口方向与所述手臂杆的转动方向之间设有夹角。其有益效果在于:将所述第二臂托的弧形处的开口方向与所述手臂杆的转动方向之间设置夹角,能够通过开口处放置目标对象的小臂,且能够通过开口一侧的所述第二臂托的局部施加对目标对象小臂的固定力,无需外设柔性绳对两者进行绑定,使用方便,降低结构复杂度。
在一种可行的实施例中,所述第二臂托均设置为至少两个。其有益效果在于:这样能够通过两点或多点支撑的方式对目标对象的小臂进行支撑。
在一种可行的实施例中,所述壳体包括承载部和支撑部;所述承载部中空设置,所述驱动组件设置于所述承载部内,且所述手臂杆与所述壳体的旋转连接位于所述承载部内,所述支撑部设置于所述承载部外侧,所述第一臂托固定于所述支撑部。其有益效果在于:通过中空设置所述承载部,便于将所述驱动组件设置于所述承载部内,避免机械转动对目标对象造成伤害,便于提升装置安全系数,设置所述支撑部便于固定所述第一臂托,便于调整所述第一臂托相对于所述承载部的尾椎,便于对所述目标对象的大臂进行稳定的支撑。
在一种可行的实施例中,所述驱动组件包括驱动件、第一连接件和第二连接件;所述驱动件固定于所述壳体,所述第一连接件的一端固定于所述驱动件,所述第一连接件的另一端转动连接于所述的第二连接件的一端,所述第二连接件的另一端转动连接于所述手臂杆,所述驱动件用于带动所述第一连接件转动,所述第一连接件用于通过所述第二连接件带动所述手臂杆往复摆动。其有益效果在于:通过驱动件提供动力,带动所述第一连接件进行转动,并在所述第二连接件的连动作用下带动所述手臂杆转动,使得能够通过控制所述驱动件的转动幅度带动所述活动件进行往复摆动,对目标对象的手臂进行训练。
在一种可行的实施例中,所述驱动件为电机,所述电机的驱动轴驱动连接所述第一连接件。其有益效果在于:通过所述电机对所述第一连接件的转动进行驱动,提供手臂杆相比于所述旋转轴转动的动力。
本发明还提供了一种康复机器人,控制装置、手部训练装置和上述实施例中任一项所述的康复训练装置;所述手部训练装置设置于所述目标对象的手指,所述手部训练装置用于对所述目标对象的手指进行训练;所述控制装置分别与所述驱动组件和所述手部训练装置电连接,所述控制装置用于分别控制所述驱动组件和所述手部训练装置的启闭。其有益效果在于:通过所述手部训练装置和所述康复训练装置能够同时对目标对象的指关节和肘关节进行锻炼,通过设置所述控制装置便于对所述手部训练装置和所述康复训练装置的启闭进行控制,便于使用。
在一种可行的实施例中,所述控制装置设置于所述壳体、所述手臂杆或所述手部训练装置中的任意一处。其有益效果在于:这样设置一方面能够节省空间,另一方面便于操作。
附图说明
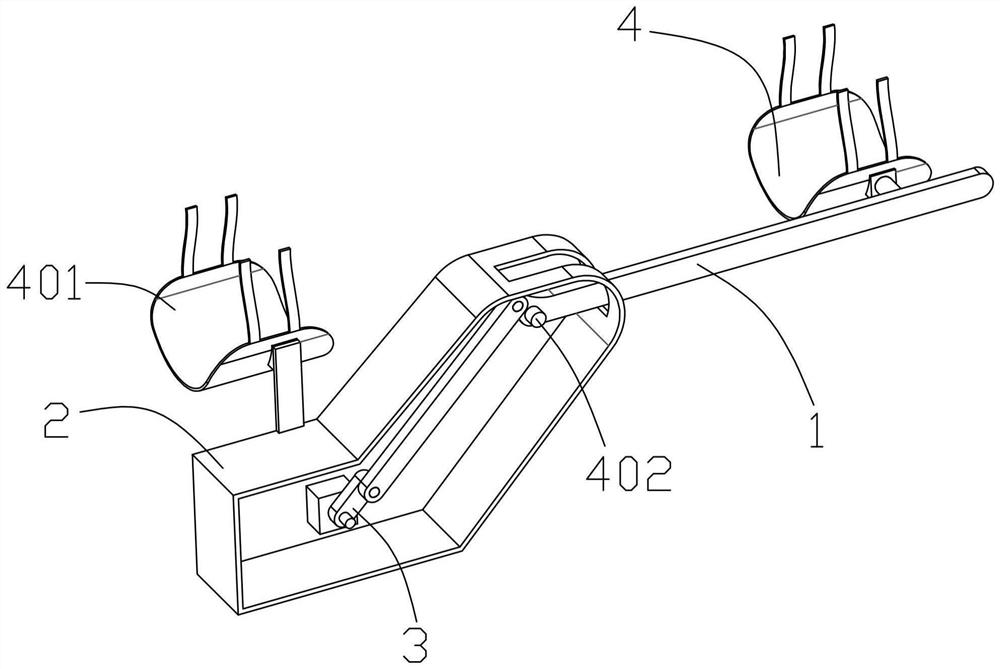
图1为本发明第一种实施例中康复训练装置的部分结构示意图;
图2为图1中康复训练装置的另一状态示意图;
图3为本发明第二种实施例中手臂杆和第二臂托的展开结构示意图;
图4为本发明第三种实施例中旋转组件与第二臂托的部分结构示意图;
图5为本发明第四种实施例中柔性铰链和壳体的部分结构示意图;
图6为本发明第五种实施例中柔性铰链和壳体的部分结构示意图;
图7为本发明第六种实施例中柔性铰链和壳体的部分结构示意图;
图8为本发明第七种实施例中康复训练装置的部分结构示意图;
图9为本发明第八种实施例中康复训练装置的结构示意图;
图10为本发明第九种实施例中驱动组件和手臂杆的结构示意图;
图11为本发明第十种实施例中康复机器人的结构示意图。
图中标号:
1、手臂杆;101、滑槽;102、滑块;103、转动轴;104、旋转组件;105、端头;106、螺纹杆;107、轴套;
2、壳体;201、承载部;202、支撑部;203、柔性铰链;204、柔性绳;205、弹性件;
3、驱动组件;301、驱动件;302、第一连接件;303、第二连接件;
4、第二臂托;401、第一臂托;402、旋转轴;403、开口;
5、控制装置;
6、手部训练装置;
7、康复训练装置。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。除非另外定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本文中使用的“包括”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
针对现有技术存在的问题,本发明的实施例提供了一种康复训练装置及康复机器人。
图1为本发明第一种实施例中康复训练装置的部分结构示意图,图2为图1中康复训练装置的另一状态示意图,图3为本发明第二种实施例中手臂杆和第二臂托的展开结构示意图。
本发明一些实施例中,参考图1至图3,该康复训练装置包括壳体2;第一臂托401,所述第一臂托401固定于所述壳体2,被设置为放置目标对象的大臂并使得所述大臂保持一方向;手臂杆1,所述手臂杆1通过旋转轴402旋转连接所述壳体2,所述手臂杆1的自由端上设置有滑槽101;第二臂托4,所述第二臂托4上连接有与所述滑槽101适配的滑块102且所述滑块102被设置为在所述滑槽101上滑动,所述第二臂托4被设置为放置目标对象的小臂;以及,驱动组件3,所述驱动组件3连接于与所述手臂杆1的自由端相对于所述旋转轴402的另一端,带动所述手臂杆1围绕所述旋转轴402相对于所述方向旋转一角度;所述第二臂托沿着所述手臂杆1滑动,使得所述手臂杆1在旋转时所述第二臂托4进行适应性调整。
本发明一些具体实施例中,所述手臂杆1和所述壳体2均为硬质材料制成,所述手臂杆1通过旋转轴402可转动的设置在所述壳体2上,所述驱动组件3包括电机,所述驱动组件3与手臂杆1之间通过两根连杆进行铰接,控制所述驱动组件3的驱动轴的转动幅度即可带动所述手臂杆1相对于所述壳体2在固定范围内进行转动,通过正反向控制所述驱动组件3即可带动所述手臂杆1摆动。
在一些实施例中,所述手臂杆1位于所述旋转轴402右侧的部分设有所述滑槽101,所述滑槽101内设有可沿所述滑槽101自由滑动的所述滑块102,所述第二臂托4设置在所述滑块102上。
在一些实施例中,所述第二臂托4固定所述目标对象的小臂,所述第一臂托401固定所述目标对象的大臂,所述第一臂托401固定在所述壳体2上。在所述驱动组件3的作用下即可带动所述目标对象的手臂进行肘关节的训练。
在一些实施例中,所述滑块102靠近所述第二臂托4的一侧设有转动轴103,所述第二臂托4可转动的设置于所述转动轴103。
在一些实施例中,所述第一臂托401和所述第二臂托4上设有轧带或魔术贴,用于对目标对象的大臂和小臂进行绑缚固定。
图4为本发明第三种实施例中旋转组件与第二臂托的部分结构示意图。
本发明一些实施例中,参考图1至图4,还包括旋转组件104,所述第二臂托4设置有通孔;所述旋转组件104包括端头105和与端头105连接的螺纹杆106,所述螺纹杆106穿过所述通孔并与所述滑块102螺纹连接;所述端头105卡在所述第二臂托4的通孔上。
本发明一些具体实施例中,所述通孔为沉头孔,所述旋转组件104包括端头105和所述螺纹杆106,所述端头105和所述螺纹杆106一体设置,所述通孔前后方向水平贯穿所述第二臂托4的一侧侧壁,所述滑块102上设有螺纹孔,所述螺纹杆106靠近所述手臂杆1的一端设有外螺纹,所述端头105卡接在所述沉头孔内,所述螺纹杆106旋拧在所述滑块102上的螺纹孔内,且所述第二臂托4可以绕所述螺纹杆106转动。
在一些实施例中,所述旋转组件104还包括螺母,所述螺母旋拧在所述螺纹杆106上,且所述螺母与所述滑块102的侧面抵接。这样设置能够提升所述螺纹杆106与所述滑块102的紧固力,降低所述第二臂托4绕所述螺纹杆106转动时,所述螺纹杆106与所述螺纹孔出现相对滑动的可能。
本发明一些实施例中,参考图1至图4,在所述通孔与所述螺纹杆106的间隙设置有轴套107或隔离柱(图中未示)。
本发明一些具体实施例中,所述轴套107和所述隔离柱(图中未示)均为圆形管状结构,同轴设置在所述螺纹杆106外侧,能够降低所述螺纹杆106与所述第二臂托4的通孔之间的摩擦系数。
图5为本发明第四种实施例中柔性铰链和壳体的部分结构示意图。
本发明一些实施例中,参考图1至图5,还包括柔性铰链203;所述旋转轴402通过所述柔性铰链203连接于所述壳体2,所述柔性铰链203使得所述旋转轴402活动设置于所述壳体2。
本发明一些具体实施例中,所述柔性铰链203的一端固定在所述壳体2内,所述旋转轴402固定设置于所述柔性铰链203的另一端,在所述柔性铰链203的作用下,所述旋转轴402与所述壳体2的相对位置能够发生移动,使得所述目标对象在进行肘关节训练时,能够在所述柔性铰链203的作用下对所述承载件的转轴与所述目标对象肘关节的转轴发生的偏移进行补偿。
在一些实施例中,所述柔性铰链203为至少两个钢圈组成的链结构。在一些具体的实施例中,由于两个或多个钢圈组成的链结构中的相邻的钢圈的位置和角度能够调整,因此在通过链结构对所述旋转轴402进行固定时,旋转轴402相对于所述壳体2的位置能够在一定范围内移动。
在一些实施例中,在肘关节运动的过程中,肘关节的运动轴是一个变动的轴,承载件的转轴与肘关节运动轴可能会发生偏移,承载件的旋转轴402与关节运动轴不重合会导致人机协调性能降低,甚至会对患者造成二次伤害。故此,设置所述柔性铰链203,这样承载件不仅可以旋转,也可以发生相应地移动,为目标对象肘关节的转动提供随动的自由度。
本发明一些实施例中,参考图1至图5,所述柔性铰链203包括柔性绳204;所述柔性绳204的一端固定设置于所述壳体2,所述柔性绳204的另一端与所述旋转轴402连接,所述柔性绳204用于悬挂所述旋转轴402。
本发明一些具体实施例中,所述柔性绳204为弹性绳或非弹性绳,所述弹性绳的顶端固定设置于所述壳体2的内侧壁,所述旋转轴402固定设置于所述弹性绳的底端,这样使得所述旋转轴402与所述外壳的相对位置能够发生相对移动。
在一些实施例中,所述外壳上设有所述旋转轴402的限位槽,通过所述柔性铰链203和所述限位槽同时对所述旋转轴402的可移动方向进行限制。
图6为本发明第五种实施例中柔性铰链和壳体的部分结构示意图,图7为本发明第六种实施例中柔性铰链和壳体的部分结构示意图。
本发明一些实施例中,参考图1至图7,所述柔性铰链203包括弹性件205;所述旋转轴402的两端通过所述弹性件205活动设置于所述壳体2。
本发明一些具体实施例中,所述弹性件205为弹簧,所述旋转轴402的两端分别与一个所述弹性件205一端固定连接,所述弹性件205的另一端固定连接至所述外壳上,利用所述弹性件205可变形且可自动复位的特性对所述旋转轴402的移动进行支撑和限制。
在一些实施例中,所述弹性件205设置为多个,多个所述弹性件205分别环绕设置于所述旋转轴402的两端,两侧的所述弹性件205分别对所述旋转轴402的侧壁进行支撑,使得所述旋转轴402能够在多个所述弹性件205的限制下进行移动。
图8为本发明第七种实施例中康复训练装置的部分结构示意图。
本发明一些实施例中,参考图1至图8,所述第二臂托4设置为弧形。
本发明一些具体实施例中,所述第二臂托4整体设置为弧形。
在一些实施例中,所述第二臂托4设置为C字形。
在一些实施例中,所述第二臂托4局部设置为弧形。在一些具体的实施例中,所述第二臂托4设有多段弧形,所述多段弧形的圆心位于不同位置,或者所述多段弧形中至少两个弧形的半径不等。
在一些实施例中,所述第二臂托4中心对称设置。
在一些实施例中,所述第一臂托401的结构与所述第二臂托4的结构相同。
图9为本发明第八种实施例中康复训练装置的结构示意图。
本发明一些实施例中,参考图1至图9,所述第二臂托4的弧形处的开口403方向与所述手臂杆1的转动方向之间设有夹角。
本发明一些具体实施例中,所述第二臂托4在圆周上未铺满,未被占有的地方即所述开口403所在的位置。换言之,所述第二臂托4在其圆周方向设有开口403,所述第二臂托4的轴向即长度方向,所述圆周方向即所述第二臂托4径向的圆周。
在一些实施例中,所述手臂杆1左右方向水平设置,所述第二臂托4平行于所述手臂杆1设置,所述手臂杆1围绕所述壳体2的转轴方向前后水平设置,所述手臂杆1能够绕所述旋转轴402向上转动,所述开口403朝向前侧或后侧。
在一些实施例中,所述第二臂托4的弧形处的开口403角度范围为120度至150度。
在一些实施例中,将所述第二臂托4开口403朝向前后侧设置,当所述驱动组件3带动所述手臂杆1向左上方转动时,所述第二臂托4的下侧部分能够对目标对象的小臂提供上托力,使得所述小臂相对于所述大臂靠近,当所述驱动组件3带动所述手臂杆1向右下方转动时,所述第二臂托4的上侧部分能够对目标对象的小臂提供下压力,使得所述小臂相对于所述大臂远离,无需通过柔性绳204对小臂进行绑定,简化使用过程。
在一些实施例中,所述第二臂托4平行于所述手臂杆1设置,指的是初始状态时或者是一定情况下,在一些其他的情况下,随着所述小臂的转动,小臂和大臂之间的转动点相对于手臂杆1和壳体2的转动点会发生距离和角度上偏移,这样会使得所述第二臂托4与所述手臂杆1不再处于相会平行的状态,会发生相对倾斜。
本发明一些实施例中,所述第二臂托4设置为至少两个。
本发明一些具体实施例中,所述第二臂托4设置为两个,两个所述第二臂托4均可滑动和可转动的设置在手臂杆1上,两个所述第二臂托4左右方向对称设置。
本发明一些实施例中,参考图1至图9,所述壳体2包括承载部201和支撑部202;所述承载部201中空设置,所述驱动组件3设置于所述承载部201内,且所述手臂杆1与所述壳体2的旋转连接处位于所述承载部201内,所述支撑部202设置于所述承载部201外侧,所述第一臂托401固定于所述支撑部202。
本发明一些具体实施例中,所述承载部201中空设置,所述驱动组件3设置于所述承载部201内,并且所述手臂杆1与所述壳体2的旋转连接处设置于所述承载部201内,这样能够避免所述手臂杆1和所述壳体2的支撑部202位夹伤目标对象。所述支撑部202竖直固定设置于所述承载部201上侧,所述第一臂托401固定在所述承载部201上。
在一些实施例中,在初始状态时,所述第一臂托401与所述第二臂托4同轴设置或设置于同一平面内。
在一些实施例中,所述支撑部202设置为两段,两段所述支撑部202相对可滑动设置,这样便于调整所述第一臂托401相对于所述壳体2的高度。
图10为本发明第九种实施例中驱动组件和手臂杆的结构示意图。
本发明一些实施例中,参考图1至图10,所述驱动组件3包括驱动件301、第一连接件302和第二连接件303;所述驱动件301固定于所述壳体2,所述第一连接件302的一端固定于所述驱动件301,所述第一连接件302的另一端转动连接于所述的第二连接件303的一端,所述第二连接件303的另一端转动连接于所述手臂杆1,所述驱动件301用于带动所述第一连接件302转动,所述第一连接件302用于通过所述第二连接件303带动所述手臂杆1往复摆动。
本发明一些具体实施例中,所述驱动件301为电机,所述第一连接件302和所述第二连接件303均为杆状结构,所述第一连接件302的左侧端固定设置于所述驱动件301的转轴上,所述第一连接件302的右侧端与所述第二连接件303的左侧端铰接设置,所述第二连接件303的右侧端铰接设置于所述手臂杆1,且所述第二连接件303与所述手臂杆1的铰接件和所述手臂杆1与所述壳体2的铰接点非同一点,这样在所述驱动件301转动时才能够带动所述活动件进行同步转动。
图11为本发明第十种实施例中康复机器人的结构示意图。
本发明一些实施例中,参考图1至图11,包括控制装置5、手部训练装置6和上述任一实施例中所述的康复训练装置7;所述手部训练装置6设置于所述目标对象的手指,所述手部训练装置6用于对所述目标对象的手指进行训练;所述控制装置5分别与所述驱动组件3和所述手部训练装置6电连接,所述控制装置5用于分别控制所述驱动组件3和所述手部训练装置6的启闭。
本发明一些具体实施例中,所述控制装置5为控制器,所述手部训练装置6为气动手套,所述手部训练装置6和所述康复训练装置7均与所述控制装置5电连接。使用时通过控制装置5分别控制所述康复训练装置7和所述手部训练装置6的启闭。
在一些实施例中,所述控制装置5单独设置。
本发明一些实施例中,参考图1至图11,所述控制装置5设置于所述壳体2、所述手臂杆1或所述手部训练装置6中的任意一处。
本发明一些具体实施例中,所述控制装置5设置于所述壳体2。
在一些实施例中所述控制装置5设置于所述手臂杆1。
虽然在上文中详细说明了本发明的实施方式,但是对于本领域的技术人员来说显而易见的是,能够对这些实施方式进行各种修改和变化。但是,应理解,这种修改和变化都属于权利要求书中所述的本发明的范围和精神之内。而且,在此说明的本发明可有其它的实施方式,并且可通过多种方式实施或实现。