一种有无人协同互操作指挥控制方法及系统
文献发布时间:2023-06-19 19:16:40
技术领域
本申请属于无人机指挥控制领域,特别涉及一种有无人协同互操作指挥控制方法及系统。
背景技术
近年来,以无人机为典型代表的无人化装备日益发展,可以执行一些长航时、高负荷、高风险的作战任务,很大程度上减轻了有人机飞行员的负担;然而目前无人机的自动化程度还不够,单靠无人机往往无法顺利满足复杂任务的要求,有无人协同执行任务的概念应运而成,同时预计会在未来很长一段时间内作为典型的作战样式。
目前存在的主要问题如下:
1、目前国内的指挥控制主要针对单一作战装备,缺乏对有无人协同互操作指挥控制方法的研究;
2、目前国内缺少有无人协同任务式指挥控制问题的研究,没有形成任务式指挥控制信息,缺乏任务式指挥控制信息的规范化转换及传输方式,同时缺乏对有人与无人装备间的任务式指挥控制指令理解,导致有人平台和无人平台无法实现基于任务的高效指挥控制,对有无人协同作战效能的提升造成影响。
因此,如何实现有无人协同作战的高效指挥控制是一个需要解决的问题。
发明内容
本申请的目的是提供了一种有无人协同互操作指挥控制方法及系统,以解决现有技术中有人机与无人机之间缺乏高效的指挥控制方法,导致难以实现高效指挥控制的问题。
本申请的技术方案是:一种有无人协同互操作指挥控制方法,包括,进行有无人协同典型的作战任务场景分析,获取不同的任务场景所对应的约束条件;进行能力聚合,形成基于能力的任务式指挥控制信息列表;有人机根据指挥控制信息列表向无人机发送任务式控制指令;将任务式控制指令传输至消息转换中间件的消息转换模块,基于飞机地址,调用不同的消息转换模块,对任务式控制指令进行数据转换;传输转换后的任务式控制指令至无人机;无人机根据任务式控制指令执行相应的操作,并返回操作信息至有人机。
优选地,所述任务式控制指令内的信息包括有对应无人机的地址与型号信息,根据不同的型号信息,将任务式控制指令发送至消息转换中间件内不同的消息转换模块,每个消息转换模块内均设置有不同的消息传输协议,通过调用相应的消息传输协议,将数据转换后的任务式控制指令传输至对应的无人机上。
优选地,所述任务式控制指令的信息包含有无人机的地址信息,任务式控制指令发送至消息转换中间件内的一消息转换模块进行数据转换,而后消息转换模块将转换后的任务式控制指令转换成通用格式,并根据地址信息发动至对应的无人机上,无人机将通用格式的任务式控制指令转换成所需的格式。
优选地,发送所述任务式控制指令之前,消息转换中间件对消息转换模块内的占用情况进行检索,并根据检索信息向有人机发送各消息转换模块的占用情况和对应消息转换模块的地址信息,而后有人机将任务式控制指令根据地址信息发送至未被占用的消息转换模块内;若所有消息转换模块均被占用,则再扩充一个消息转换模块。
优选地,所述消息转换模块在接收到任务式控制指令后,根据任务式控制指令的信息检索并获取消息转换中间件中消息字典对应的内容,完成数据转换。
优选地,所述任务式指挥控制列表包括:编队飞行、解散编队、按航线飞行、编队跟随、编队队形变换、定时/定点回程控、目标/区域攻击、目标/区域搜索、协同攻击、协同ESM探测。
作为一种具体实施方式,一种有无人协同互操作指挥控制系统,包括:
信息发送单元,用于形成基于能力的任务式指挥控制信息列表,并发送任务式指挥控制消息列表中的任务式控制指令;标准化数据总线,用于接收信息发送单元发出的任务式控制指令并输出;数据转换中间件,包括至少一组数据转换单元,用于接收数据传输单元的任务式控制指令,对任务式控制指令进行数据转换,并将数据转换后的消息输出;任务系统,用于接收数据转换中间件的内容并进行任务解析,并将任务解析的内容输出;显控系统,用于接收任务系统/消息转换中间件发出的任务解析内容,并进行相应的显示。
优选地,所述数据转换中间件内还包括有消息字典,所述消息字典与每个消息转换模块相连,为消息转换提供支撑;所述数据转换中间件还包括有单元检索模块和单元扩充模块,所述单元检索模块用于检索消息转换模块的占用情况,所述单元扩充模块用于管理和增加消息转换模块。
本申请的一种有无人协同互操作指挥控制方法,在进行有无人协同互操作指挥控制时,通过设置不同的任务场景和对应的约束条件来形成任务式的指令模式,通过形成任务式指挥控制信息列表来向无人机下发任务式控制指令,通过设置消息转换单元将任务式控制指令转化为各个无人机均能够接收的具体的操作指令,来供无人机进行操作,从而有效减轻了任务过程中指挥员和操作员的负担,使得他们将会有更多的精力去关注战场态势的变化,从而提升有无人协同的成功率;同时通过规范有无人协同任务式指挥控制交互流程,逐步形成通用的消息转换中间件,提升异构有无人平台间的互操作性。
附图说明
为了更清楚地说明本申请提供的技术方案,下面将对附图作简单地介绍。显而易见地,下面描述的附图仅仅是本申请的一些实施例。
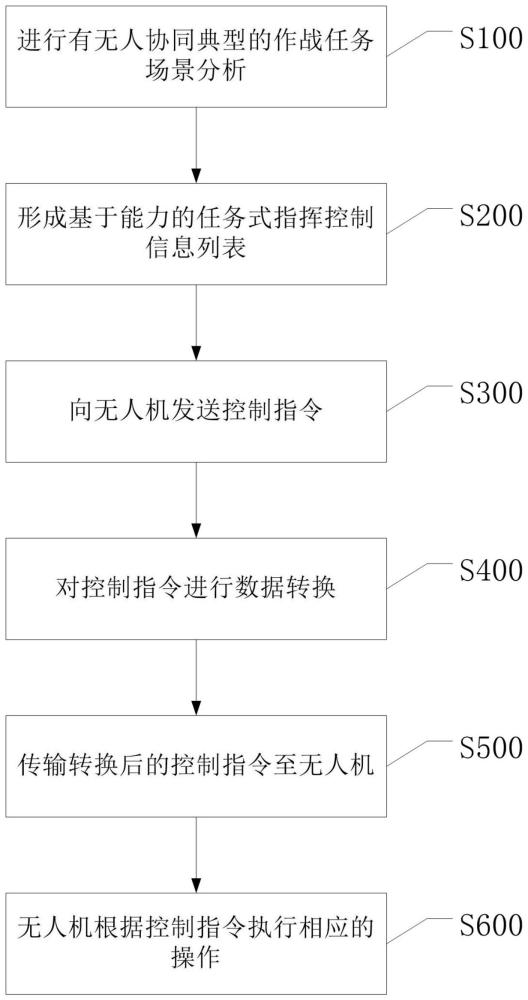
图1为本申请整体流程示意图;
图2为本申请指挥控制系统的整体结构示意图。
具体实施方式
为使本申请实施的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行更加详细的描述。
一种有无人协同互操作指挥控制方法,采用有人机通过任务式控制指令的方式对无人机进行指挥控制,来满足无人机在复杂多变的信息化战场环境下执行任务的要求。
如图1所示,具体包括以下步骤:
步骤S100,进行有无人协同典型的作战概念和作战任务场景分析,获取不同的任务场景所对应的约束条件;
实际作战任务中的任务场景多种多样,根据不同的任务场景,基于环境、平台、武器、传感器等会产生不同的约束条件,不同的任务场景与约束条件的组合,在不同的条件下,同一任务场景下的约束条件也不一定相同,因此每种任务均需要进行单独考虑。
步骤S200,进行不同任务场景和约束条件下的能力聚合,形成基于能力的任务式指挥控制信息列表;
任务式指挥控制信息列表包括:编队飞行、解散编队、按航线飞行、编队跟随、编队队形变换、定时/定点回程控、目标/区域攻击、目标/区域搜索、协同攻击、协同ESM探测等。在不同的任务场景和约束条件下,需要根据实地发出不同的任务指令。
步骤S300,有人机根据指挥控制信息列表向无人机发送任务式控制指令,该任务式控制指令针对实时性要求不高的任务式指挥控制信息,对于实时性要求较高的指挥控制信息,仍可以通过地面站向无人机直接发出;
此时发出的任务式控制指令仅为方向性的文件,而不进行无人机具体指令的下发,该规范化的任务式控制指令需要翻译后转化为具体的任务式控制指令才能够供给无人机进行使用。
步骤S400,将任务式控制指令传输至消息转换中间件的消息转换模块,对任务式控制指令进行数据转换;
由于无人机具有多种型号,不同无人机之间的消息传输协议不同,因此有人机上的任务式控制指令需要进行消息的格式转换才能够被无人机正确解析,而对于格式转换的方法,本申请设计有两种,当然不限于这两种,任何能够实现消息转换的常规方式均在本申请的保护范围之内。
第一种的数据转换方法包括:任务式控制指令内的信息包括有对应无人机的地址与型号信息,根据不同的型号信息,任务式控制指令发送至消息转换中间件内不同的消息转换模块,每个消息转换模块内均设置有不同的消息传输协议,通过消息传输协议将数据转换后的任务式控制指令传输至对应的无人机上。
该方法将每个消息转换模块与同型号的一个或多个无人机对应设置,该消息转换模块与对应的无人机之间采用相同的消息传输协议,能够直接进行消息的正确解析;对于其它型号的无人机,则采用其它型号的消息转换模块进行依次匹配,在消息转换模块中,在翻译完成任务式控制指令之后,只需将任务式控制指令转换成自身对应的消息传输格式即可。
第二种数据转换方法包括:任务式控制指令的信息包含有无人机的地址信息,任务式控制指令发送至消息转换中间件内的消息转换模块进行数据转换,而后消息转换模块将转换后的任务式控制指令转换成通用格式,并根据地址信息发送至对应的无人机上,无人机将通用格式的任务式控制指令转换成所需的格式。
该方法中的消息转换模块将翻译完成的任务式控制指令转换为通用格式,从而供无人机上的通用格式接收,无人机再将任务式控制指令转换为所需的格式来实现无人机指令的执行。
在进行任务式控制指令传输的过程中,存在消息转换单元正在占用以执行一种任务式控制指令、而无法同时执行两种任务式控制指令的情况,需要对每个数据转换单元进行检索,找出哪些数据转换单元被占用、哪些数据转换单元空闲,这样有人机后续发出的任务式控制指令仅传递给空闲状态下的数据转换单元内,以保证任务式控制指令传输的稳定性。
数据转换单元的具体检索方法为:发送任务式控制指令之前,消息转换中间件对消息转换模块内的占用情况进行检索,并根据检索信息向有人机发送各消息转换模块的占用情况和对应消息转换模块的地址信息,而后有人机将任务式控制指令根据地址信息发送至未被占用的消息转换模块内;若所有消息转换模块均被占用,则再扩充一个消息转换模块。(这个里面我并未限制这个指令一定是人发出的,一般是通过程序来控制,主要是为了说明占用问题,您那边要是有更好的写法也可以)
在上述两种控制指令传输的过程中,均需要进行控制指令的翻译才能够进行,本申请通过设置消息字典来支撑对控制指令的翻译,也即是说控制指令相当于消息字典的索引,消息转换单元通过索引获取消息字典的内容,进行查找、匹配、组合等操作,进行数据转换后,传输至无人机。通过采用该方式,有人机只需要下发任务即可完成对无人机的控制,这种任务式的方式能够地提升控制指令传输的效率,减轻有人机飞行员的操作负荷。
步骤S500,传输转换后的控制指令至无人机;无人机在接收到翻译后的控制指令后,需要先对任务指令进行解析,而后再通过内容的控制系统下发到无人机的各个其它系统进行执行。
步骤S600,无人机根据控制指令执行相应的操作,并返回操作信息至有人机。操作信息可以按照原路返回,通过查看返回的操作信息,能够对无人机的工作状态进行监视,并且能够实时核验无人机的返回信息,在发现异常/故障时能够及时处理。
在进行有无人协同互操作指挥控制时,通过设置不同的任务场景和对应的约束条件来形成任务式的指令模式,通过形成任务式指挥控制信息列表来向无人机下发控制指令,通过设置消息转换单元将控制指令转化为各个无人机均能够接收的具体的操作指令,来供无人机进行操作,从而有效减轻了任务过程中指挥员和操作员的负担,使得他们将会有更多的精力去关注战场态势的变化,从而提升有无人协同的成功率;同时通过规范有无人协同任务式指挥控制交互流程,逐步形成通用的数据转换中间件,提升异构有无人平台间的互操作性。
作为一种具体实施方式,一种有无人协同互操作指挥控制系统,如图2所示,包括:信息发送单元、数据转换中间件、标准化数据总线、任务系统和显控系统。信息发送单元用于形成基于能力的任务式指挥控制信息列表,并发送任务式指挥控制消息列表中的控制指令;标准化数据总线用于接收信息发送单元发出的控制指令并输出;数据转换中间件包括至少一组数据转换单元,用于接收数据传输单元的控制指令,对控制指令进行数据转换,并将数据转换后的消息输出;任务系统用于接收数据转换中间件的内容并进行任务解析,并将任务解析的内容输出;显控系统用于接收任务系统/数据转换中间件发出的任务解析内容,并进行相应的显示。
信息发送单元形成的任务式指挥控制信息列表包括有无人协同能力1、有无人协同能力2、有无人协同能力3等,通过数据总线发送至数据转换中间件的数据转换1、数据转换2、数据转换3中,其中有无人协同能力1与数据转换1相对应,在转换完成后,将转换后的指令传递至无人机的任务系统和显控系统,操作简单、控制稳定。
优选地,数据转换中间件内还包括有消息字典,消息字典与每个消息转换单元相连,为消息转换提供支撑,消息字典用来实现对无人机控制指令的具体规范化操作解析;数据转换中间件还包括有单元检索模块和单元扩充模块,单元检索模块用于检索消息转换单元的占用情况,单元扩充模块用于管理和增加消息转换单元,单元扩充模块保证随着无人机的发展,在数据转换中间件内仍可以随时增加新的功能。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。
- 一种基于无人机的公安智能指挥调度方法及系统
- 一种基于角色的有人/无人协同指挥控制系统及其方法
- 一种基于角色的有人/无人协同指挥控制系统及其方法