一种具有流动布局的高速航行器及其设计优化方法
文献发布时间:2023-06-19 19:16:40
技术领域
本发明涉及一种高速航行器,具体涉及一种具有流动布局的高速航行器及其设计优化方法。
背景技术
高速航行器主要指在空气或者水中高速航行的人造设备和装置,包括在空中高速飞行的飞机、导弹或其他航空器,在水中高速航行的水面舰船(特指吃水线以下的部分)以及水下高速航行的潜艇、无人潜艇等潜航器;所谓高速,是指航行器的航行速度较高,对于航空器而言,通常是指速度超过音速,对于水中的航行器,通常指速度超过50km/h。
流动布局,主要指根据流体动力学原理对航行器的流动外形进行的优化设计,以及为了提高流动效率、减小流动阻力、完善航行器功能而设置的相关部件。
在流体中航行的物体会受到流体的流动阻力,航行器的动力主要用于克服航行器在航行过程中的流动阻力。流动阻力会随着航行速度的增大而增大,通常可以大致的认为跟航行速度的平方成正比,因此,随着航行速度的提高,流动阻力会快速增大,高速航行器在航行的过程中需要消耗大量的能量用以克服流动阻力。快速增加的流动阻力也成为限制航行器最高航速的主要制约因素。如何有效降低航行器在高速航行时的流动阻力是摆在面前的一大问题。
发明内容
本发明所要解决的技术问题在于针对上述现有技术的不足,提供一种具有流动布局的高速航行器及其设计优化方法,该航行器可以大幅减小航行器在航行过程中的流动阻力,由于流动阻力大幅减小,因而在同样的动力下,航行器的最高航速可以大幅提升,明显降低航行过程中的能量消耗,对于节能减排具有重要意义。
为解决上述技术问题,本发明采用的技术方案是:一种具有流动布局的高速航行器,其特征在于,包括航行器本体,所述航行器本体呈流线型且航行器本体是相对于过轴线的水平面对称的,或者是相对于过轴线的垂直面对称的,所述轴线是指航行器本体横截面中心的连线,轴线通常与航行器的航向重合,所述航行器本体的水平长度大于垂直宽度,所述航行器本体分为迎流部和背流部,所述迎流部和背流部分界点位于航行器本体水平和垂直宽度最大的位置,所述迎流部为锥体,所述迎流部的前端设置有尖刺,所述迎流部过轴线的水平或者垂直剖面线为两条相对于轴线对称的线段,两条剖面线均用以反正切函数为关键因子的函数描述。特殊的,所述迎流部过轴线的水平剖面线与过轴线的垂直剖面线尺寸参数相同,且过轴线的任意剖面线的尺寸参数都相同时,则航行器本体为回转体。
优选地,所述尖刺为固定式或可伸缩式,尖刺尺寸通常较长,会增大航行器本体的轴向尺寸,将尖刺设置成多个分段可伸缩结构,通过液压系统控制伸缩,停泊或者低速航行时可以收缩到航行器本体头部内,在高速航行时伸展出来。
优选地,所述航行器本体上设置有鳍板,鳍板的数量为一个或多个。主要作用是导流,使航行器的航向保持稳定,防止翻滚,还可以根据控制改变航行器的航向。当在航行器本体后部设置一个垂直的鳍板时,鳍板后半部分为沿轴线转动式,则转动部分可以起到方向舵的作用,用于控制航行器转向时的滚动。当在航行器本体水平方向设置两个对称的面积较大的鳍板时,对于在空中高速飞行的航行器本体而言,这两个鳍板可以充当机翼的作用,可以产生升力,鳍板后半部分为转动式时,活动部分充当升降舵,可控制航行器的俯仰。方向舵和升降舵配合使用就可以控制航行器的航向。
优选地,所述航行器本体外围设置有束流罩,所述束流罩是薄壁管状构件,所述束流罩包裹在航行器本体外围且与航行器本体保持间距,束流罩通过鳍板与航行器本体连接。束流罩内壁和航行器本体之间的空间构成流道,航行器本体周围的流体从流道中流过。束流罩的长度通常不大于航行器本体的长度。束流罩的作用在于将航行器本体周围的高能态流体约束在一定的空间范围内流动,防止高能态流体流入周边环境,与周边环境发生物质和能量交换,进而造成能量泄露。航行器在航行过程中,前方的流体受到航行器迎流部的作用,速度方向、大小、压力会发生改变,产生展向即航行器本体宽度方向的分速度,对于空气这种可压缩流体而言,远离航行器中轴线的展向流体静压会明显增大,对于水这种不可压缩流体而言,远离航行器中轴线的展向流体速度会明显增大,如果展向外围没有束流罩的约束,无论是静压增大的可压缩流体还是速度增大的不可压缩流体都将向航行器周围的流场流动,与周围流场发生物质和能量交换,造成能量泄露,这种能量泄露会导致航行器背流部的压力降低,加大迎流部和背流部之间的压差阻力。因此,束流罩的设置有利于减少流体能量泄露,减小航行器的阻力。束流罩的设置会增大航行器的展向尺寸,束流罩与航行器本体之间的间距需要在合理范围内,过小的间距反而会增大航行器的流动阻力。实际应用中,束流罩可根据需要进行设置。
优选地,所述航行器本体的尾端设置有推进器。推进器以航行器本体周围的流体作为工质,可以为航行器本体的前进提供推力,克服航行器的流动阻力。当然,推进器也可以设置在其他位置,设置在航行器本体的尾端通常具有更高的推进效率。
一种针对具有流动布局的高速航行器的设计优化方法,其特征在于,包括以下步骤:
S1、用函数描述迎流部过轴线的水平剖面的第一条剖面线:描述迎流部第一条剖面线的函数为y
S2、引入宽度系数:为了控制航行器本体的宽度,在函数y
S3、为了控制尖刺的长度,继续在函数y
S4、描述迎流部过轴线的水平剖面的的第二条剖面线:由于两条剖面线以航行器本体的轴线对称,则描述第二条剖面线的描述函数为第一条剖面线描述函数沿对称轴x轴翻转后的函数,即y
S5、令y
优选地,为了获得比较理想的流动效率,通常取x
S6、重复S1-S5,可以得到描述迎流部过轴线的垂直剖面的两条剖面线的描述函数,其中的宽度系数w和尖刺长度系数c可以设置成与水平剖面线描述函数不同的值,当w和c值与水平剖面描述函数相同时,航行器本体是回转体。
在确定了迎流部过轴线的水平和垂直剖面线的描述函数后,迎流部其他水平和垂直剖面线可以用插值和拟合的方式确定,进而完成迎流面的三维造型设计。
y
对于在空中高速飞行的航行器,流动阻力一般认为由三部分组成,分别是压差阻力、诱导阻力和摩擦阻力,其中的诱导阻力也是由于压差造成的,可以归集为压差阻力。当航行器的速度达到和超过临界马赫数时,就会有激波产生,伴随产生激波阻力,激波阻力源于激波造成的来流总压损失以及激波诱导分离,致使航行器迎流部和背流部之间产生巨大的压力差,因此也属于压差阻力;激波阻力随着飞行马赫数的增加迅速增加,因此,对高速飞行的航行器而言,激波阻力是流动阻力的主要因素,减小流动阻力的关键在于减小激波阻力,本发明主要从两方面入手:一是尽可能减小迎流部的流体压力,同时减小背流部的流体压力损耗,二是减小迎流部的流体压力在航向(轴向)方向的压力分量值,因为真正对航行器产生阻力的是航向(轴向)方向的压力分量。
在空气中高速飞行的航行器迎流部分设计成有尖刺的锥体状,其剖面线是一个以反正切函数为关键因子的函数波形线段和沿轴线对称翻转的函数波形线段,尖刺可以优化尖刺周围的激波分布,避免出现强激波,具体来说有两大方面的益处:一方面,超音速气流经过锥状体前部的尖刺时,会在尖刺周围区域形成一个由无数个锥形马赫波(或者与马赫波很接近的弱激波)组成的马赫波阵列,这些激波不会叠加成一个强激波,而是规律分布在尖刺周围的一定区域,超音速气流穿过马赫波阵列时可以认为是被等熵压缩,尖刺周围的气流尚未被完全压缩,速度是大于音速的,静压较小,气流流过尖刺的后部,经过一道弱的正激波(也是马赫波,此时马赫数M=1)后,气流速度才降为压音速,这种设计可使得航行器迎流部整体受到的压力较小。航行器背流部设计成流线型,可减小流体流过背流部的流动损失,有利于减小航行器的压差阻力。另一方面,在迎流部前部的尖刺部分,受到流体压力的方向为迎流部的法线方向,流体压力方向几乎与航行器轴向垂直,而与航行器的展向夹角较小,将流体压力在航向(轴向)和展向两个方向进行分解,流体压力在展向的分量数值大(对回转体而言,这个力的分量会被与之对称的大小相等的反向力抵消掉),在航向(轴向)的分量很小,这对减小航行阻力也是非常有益的。综合上述两方面的因素,将航行器本体的迎流部分前部设计成尖刺,可使得航行器迎流部和背流部的压差阻力大幅减小。
迎流部前部的尖刺会使得尖刺周围形成马赫波阵列,超音速气流穿过马赫波阵列时是被无数道马赫波逐步压缩的,整个压缩行程与尖刺的长度基本相当,通常在分米和米级别。相对于强激波而言,压缩行程增加了成百万到千万倍,在马赫波阵列内,气体压强和速度呈现非常规则的梯次分布,气体在压缩过程中相当于增加了百万、千万倍长度的缓冲区,气体分子间碰撞的激烈程度大幅降低,碰撞能量频谱中包含的高频谐波成分大幅减少,被气体分子吸收而转换为分子内能的比例相应也大幅减少,气体的动能大部分转化为气体分子间的势能,这是获得高效等熵压缩的微观原因。
当航行器本体在水中使用时,尖刺可有效减小迎流部的折转角,在前段的尖刺部分尤其明显,这部分的折转角很小,因此,即使航速很高,流体压力值仍然较小。迎流部上的流体压力作用在法线方向,这个压力的方向与航行器轴向之间的夹角较大,在尖刺的最前端,夹角通常比较接近π/2(弧度),将流体压力向航行器航向(轴向)和展向两个方向进行分解,展向方向的分量大(对于对称的回转体而言,这个力可以被抵消掉),航向(轴向)方向的分量小,有利于减小流动阻力。
本发明与现有技术相比具有以下优点:
1、本发明可实现一定程度的节能减排。由于降低了航行器的流动阻力,在同样的航速下,需要的驱动力功率大幅减小,尤其是在高速航行时尤为冥想。
2、本发明可使得航行器达到更高的航速。航行器的最高航速通常会受到动力和航行经济性的限制,本发明可以大幅减小高速航行时航行器的流动阻力,因此,同样的动力可以大幅提高航行器的最高航速,航行的经济性也会同步改善。
3、本发明应用在航空领域时,可以应用到超音速飞机、超音速无人机、超音速导弹等各式飞行器上,从而获得更高的飞行速度,更优异的综合性能。航行器本体设计成回转体,外面设置鳍板和圆筒型束流罩,在高速飞行时就可以成为一台冲压压气机,压气机内的流动理论上是等熵流动,亦即等熵压缩,理论压缩效率为100%,这种冲压压气机可以进一步组成冲压发动机,或者构成组合发动机。
在航海领域,可将舰船吃水线以下的部分按照本发明的流动布局进行设计、改造,可以大幅提升舰船的航行速度,续航里程,降低能量消耗,具有良好的经济性;对潜艇按本发明的流动布局进行设计、改造,可以大幅提高航行速度,提高续航里程,束流罩还可以起到一定的隔音降噪作用,如果再配置上吸波材料,潜艇的噪音有望大幅减小,大大提高潜艇的隐蔽性和生存能力。
下面结合附图和实施例对本发明作进一步详细说明。
附图说明
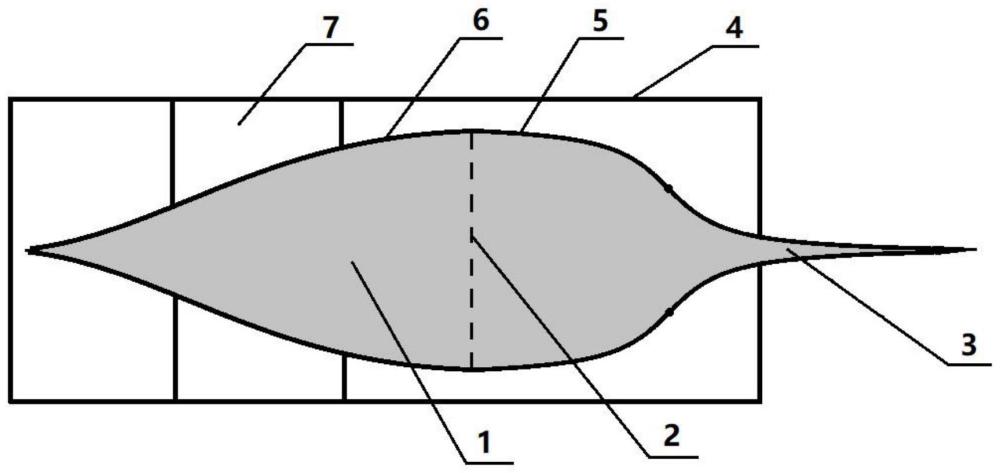
图1是本发明中实施例1冲压压气机的流动布局示意图。
图2是本发明中实施例1冲压压气机头部激波阵列示意图。
图3是本发明中实施例2潜艇的流动布局示意图。
图4是本发明实施例2中潜艇某微单元的压力分解示意图。
图5是本发明中实施例2的迎流部轴向压力分布示意图。
附图标记说明:
1—冲压压气机本体; 2—分界线; 3—尖刺;
4—压气机束流罩; 5—迎流部剖面线; 6—背流部剖面线;
7—鳍板; 8—超音速来流; 9—马赫波;
10—推进器; 11—方向舵; 12—潜艇垂直鳍板;
13—潜艇本体; 14—潜艇水平鳍板; 15—流体压力;
16—压力轴向分量; 17—压力展向分量; 18—尖刺收缩后的潜艇头部;
19—潜艇迎流部轴向压力分布曲线; 20—尖刺收缩后的潜艇迎流部轴向压力分布曲轴; 21—轴向压力坐标线;
22—潜艇尖刺;
具体实施方式
实施例1
如图1所示,本实施例提供的是使用在空气中的高速航行器,即冲压压气机,包括冲压压气机本体1、鳍板7和压气机束流罩4;冲压压气机本体1是轴对称的回转体,分为迎流部分和背流部分,分界线2位于冲压压气机本体1的展向最大尺寸处,迎着来流的部分为迎流部分,是前部有尖刺3的圆锥体,迎流部分剖面线5由以下两个函数描述:
y
y
本实施例中,背流部呈流线型,背流部剖面线6如图1中所示;鳍板7通常设置3个,其将压气机束流罩4和压气机本体1进行紧固连接,并起到导流作用;压气机束流罩4是一个薄壁圆桶,罩在压气机本体1的外围,压气机束流罩4和压气机本体1之间的空间构成空气流道,压缩后的空气在流道中流动。
冲压压气机处于工作状态时,压气机本体1的迎流部分前部的尖刺3周边区域会形成激波阵列,激波阵列示意图如图2所示,超音速来流8的马赫数M>1,在流过压气机本体1的迎流面时,首先会在尖刺3的最前端产生一道圆锥形的马赫波9,这道马赫波与超音速来流之间的夹角为马赫角μ,μ=arcsin(1/M),公式中M为来流马赫数。在冲压压气机设计马赫数下,压气机束流罩4的前缘通常与最前端的锥形马赫波9相交,这样的压气机束流罩4可防止激波压缩空气的能量向外部泄露。尖刺最前端后面的每一个微分的环形流面都会产生一道圆锥型马赫波,只是超音速来流穿过前面的马赫波后,马赫数略有降低,马赫角略有增大,静压略有升高,如图2中所示,这无数道圆锥形马赫波组成马赫波阵列,超音速来流8穿过马赫波阵列的过程,气流会受到等熵压缩,马赫数逐步降低,静压逐步升高,直到最后穿过一道弱的正激波(也是马赫波,此时马赫数M=1),速度降为亚音速。亚音速气流继续沿压气机束流罩4和压气机本体1之间的流道继续向后流动,速度进一步降低,静压进一步升高,完成超音速气流的压缩过程。
超音速来流8在穿过整个马赫波阵列的过程中,理论上是等熵压缩,理论压缩效率100%,冲压压气机理论压比可以根据来流马赫数直接在等熵流特性表格中查出,比如当来流马赫数为2时,理论压比为7.824,当来流马赫数为3时,理论压比为36.73,扣除附面层和其他流动损失,实际的压缩效率、压比应该与理论值相当接近。
对冲压压气机本体1迎流部分的受力进行分析,在迎流面上任意一个微元面,设其在展向的投影面积(迎风面积)为dS,空气作用在微元面上的压强为P,作用在微元面上的压力为dF,微元面法向与冲压压气机本体轴向的夹角为θ,则微元面的面积为dS/cos(θ),作用在微元面上的压力dF=P*dS/cos(θ),dF轴向分量dFx=P*cos(θ)*dS/cos(θ),消去cos(θ),dFx=PdS,dF展向分量dFy=P*sin(θ)*dS/cos(θ),由于冲压压气机本体1是轴对称的,展向分量dFy会被抵消掉。
如果将冲压压气机本体1前部的尖刺3去掉,则冲压压气机本体头部将由尖头变成钝头,则超音速气流会在头部形成强激波,头部的压强分布将发生变化,将压强记为Ps,超音速来流8将在钝头的顶点附近形成正激波,顶点处的压强Ps0会达到一个最大值,顶点周围,正激波逐步变为强度较弱的斜激波,Ps的值逐步减小,Ps0可以用瑞利-皮托管公式进行计算。冲压压气机本体1迎流面上任意一个微元面,设其在展向的投影面积(迎风面积)为dS,空气作用在微元面上的压强为Ps,作用在微元面上的压力为dF,微元面法向与冲压压气机本体轴向的夹角为θ,则微元面的面积为dS/cos(θ),作用在微元面上的压力dF=Ps*dS/cos(θ),dF轴向分量dFx=Ps*cos(θ)*dS/cos(θ),消去cos(θ),dFx=PsdS,dF展向分量dFy=Ps*sin(θ)*dS/cos(θ),由于冲压压气机本体1是轴对称的,展向分量dFy也会被抵消掉。尖刺去掉前,dFx=PdS,P为超音速气流经过马赫波阵列的压强,气流是被逐步压缩的,P值较小,在尖刺3的顶端处,P的值接近于超音速来流8的静压;尖刺3去掉后,dFx=PsdS,Ps为超音速来流8经过正激波和斜激波后的压强,由于经过了强激波的压缩,Ps数值较大,即Ps>P,在最前端,两者的差值更加明显;另一方面,超音速气流经过正激波和斜激波后,总压损失较大,因此冲压压气机本体背流部分的压强损失也较大,进一步增大了压差阻力,以上分析可以得出结论,带有尖刺3的头部轴向阻力明显要小。
本实施例中,冲压压气机的流动布局有多种组合应用方式:如果冲压压气机的后部连接燃烧室、尾喷管,就会构成一台完整的冲压发动机;如果和后一级的航空发动机进气口对接,可构成一台组合发动机;如果在压气机本体的后端配备一台火箭发动机,则可成为一枚超音速导弹。
如果上述冲压压气机的后部不连接其他设备或者装置,则本体背流部分外侧流道中被压缩的空气将重新膨胀加速成超音速气流。由于从进气口到排气口整个流动过程理论上是等熵流动,空气总压损失较小,整体的流动阻力是相当小的。如果再在束流罩外部两侧配置两个较大尺寸的机翼和发动机以及方向舵,就会变身为一架流阻很低的超音速飞机。
实施例2
如图3所示,本实施例提供了一种在水下高速航行的航行器即潜艇,包括潜艇本体13,潜艇垂直鳍板12,方向舵11,潜艇水平鳍板14,推进器10;潜艇本体13是潜艇的主体,其流动造型和相关技术特征跟上一个实施例相同,只在参数设置方面会有差别,潜艇本体13迎流部分剖面线也由以下两个函数描述:
y
y
本实施例中,潜艇本体13迎流部分前部的潜艇尖刺22设置成多段液压控制可伸缩的,潜艇尖刺22收缩后,潜艇的头部将和普通潜艇头部类似,当潜艇停泊或者低速航行时,潜艇尖刺22收缩,高速航行时,潜艇尖刺22伸展出来;潜艇垂直鳍板12后部设置有可转动的方向舵11,另外,潜艇垂直鳍板12下方还设置有两个潜艇水平鳍板14,它们后部设置有升降舵,方向舵和升降舵配合使用可以控制潜艇的航向;推进器10以流经潜艇本体13背流部分表面的水作为工质,为潜艇航行提供推力,可以是螺旋桨或者泵推装置等。
本实施例中,图4是潜艇迎流面上某微元面的压力分解示意图,设其在展向的投影面积(迎流面积)为dS,微元面法线与潜艇本体13轴向的夹角为θ,则微元面的面积为dS/cos(θ),流体作用在微元面上的流体压力15的值是dF,方向是微元面法线方向,流体压力15的值dF可分解成压力轴向分量16,其值为dFx,以及压力展向分量17,其值为dFy;dFx会阻碍潜艇前进,这个分量越小越好,dFy则可被轴对称微元面的另一个相反的分量抵消掉。从图4可以看出,dF与轴向的夹角为θ,则有dFx=P*cos(θ)*dS/cos(θ)=PdS,可见,决定潜艇本体13迎流面压力轴向分量dFx主要有两个因素,一个是表面压强P,另一个是迎流面积dS,对于相同迎流面积而言,如果能减小压强P,则可获得更小的dFx,从而减小阻力。压强P由两部分组成,P=Ph+Pc,一部分是静压Ph,这个值与水深h有关,并且通常可以认为潜艇本体13的迎流部分和背流部分会相互抵消掉,不予考虑,另一部分压强产生于迎流面对来流方向的改变,为Pc,由动量定理可知,Pc由流经微元面的流量与速度改变量的乘积决定,流量由航速和水的密度的乘积决定,而速度改变量主要由两个因子决定,一个因子是微元面与来流方向之间的折转角,这个因子可以理解为一阶因子,起主要作用,另一因子是当前微元面与来流方向前一个微元面之间的折转角,这个因子可以理解为二阶因子,起次要作用。为便于对一阶因子和二阶因子作用机理的理解,引入一个近面层的概念,所谓近面层,是指附面层外侧的一层流体,这层流体的流速已经发生转折,基本上与迎流面贴合流动。一阶因子主要影响近面层外侧(远离迎流面一侧)的压强,二阶因子主要影响近面层内侧(紧贴附面层一侧)的压强,下面对这两个因子做进一步分析:
先分析影响Pc的一阶因子,这个因子是主要因子。对剖面线描述函数y=w*(arctan(x/w)-c)进行求导,得到导数函数y'=1/(1+(x/w)
再分析影响Pc的二阶因子,对剖面线描述函数的导数函数y'=1/(1+(x/w)
可以得出结论,潜艇尖刺22优化了潜艇本体13头部的流场压强分布,对减小潜艇的流动阻力是非常有益的。
通过上述分析,取潜艇本体13迎流面上环形微元面进行进一步研究,可以得到图5所示的潜艇迎流面轴向压力分布示意图,图5的左边为潜艇本体13的迎流部分,右边为迎流部分沿展向的轴向压力分量曲线图。潜艇迎流面轴向压力分布曲线19标示了迎流面上压力轴向分量沿展向的分布情况,可以看到,迎流部分潜艇尖刺22顶点的压力轴向分量较小,因为此处的压强只比静压Ph略大,而这条曲线的积分如图5中阴影面积表示了迎流面受到的流体轴向压力的总值。
本实施例中,潜艇尖刺22在液压控制下收缩到潜艇本体头部内时,潜艇的头部就变成现在普通潜艇的头部,潜艇尖刺22收缩后的潜艇头部18如图5中左边虚线所示。通过迎流面压力分解,可以得到潜艇尖刺22收缩后的潜艇迎流面轴向压力分布曲线20,曲线的最大值在轴向压力坐标轴21上,此处对应于潜艇本体13的最前端,是来流的一个驻点,此处的流体的折转角可以认为是π/2(弧度),压强等于来流的总压P
P
其中,Ph为水的静压,ρ为水的密度,V为潜艇的航速。可见,P
潜艇迎流面轴向压力分布曲线20和图5中竖轴围成的面积就是潜艇尖刺22收缩后的潜艇迎流面受到的流体轴向压力的总值。显然,这个面积比潜艇迎流面轴向压力分布曲线19与竖轴围成的面积大很多,表示潜艇尖刺22收缩后的潜艇受到的轴向阻力要大很多,航速越高,两者间的差值越大。由此可得出结论,潜艇尖刺22可使得潜艇流动阻力更小,能达到的航速更高,续航里程更大,更节能。为了增加潜艇的排水量同时少增加流动阻力,可将潜艇背流部分的长度大幅加长。
本实施例可以应用在水面舰船上,将水面舰船的吃水线以下部分改造成一个或者多个类似上述潜艇的流动布局,将大大提升舰船的航速,同时可以节能减排,尤其适合在军舰、快艇上应用。
在海洋中,游得最快的鱼类都是尖嘴鱼,比如剑鱼、旗鱼,游速最高可以超过150km/h,它们的头部都长有长长的尖刺,它们头部与本发明的航行器本体迎流部分非常相似,其头部剖面线,与反正切函数波形是非常相似的,这是自然界长期进化的结果,可以认为是本发明在自然界的一个例证,因此,本发明也非常符合仿生学的原理。
以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制。凡是根据发明技术实质对以上实施例所作的任何简单修改、变更以及等效变化,均仍属于本发明技术方案的保护范围内。