用于安装多唛语音识别模块的机器人外壳结构
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及技术领域,具体涉及一种用于安装多唛语音识别模块的机器人外壳结构。
背景技术
在机器人设备上,多唛语音识别模块是语音交互的核心模块,为保证模块语音识别效果,对于用于安装固定多唛语音识别模块的外壳结构有系列设计要求,其中核心要求之一为多唛语音识别模块前的开孔大小及深度一致。此开孔要求对于安装固定多唛语音识别模块的外壳结构为变化曲面时无法做到。
公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
发明内容
为克服现有技术所存在的缺陷,现提供一种用于安装多唛语音识别模块的机器人外壳结构,以解决在机器人的变化曲面外壳结构上安装固定多唛语音识别模块时,无法做到用于安装语音识别模块的开孔的大小及深度一致的问题。
为实现上述目的,提供一种用于安装多唛语音识别模块的机器人外壳结构,包括外壳本体,所述外壳本体具有在所述外壳本体的厚度方向上相对的内侧和外侧,所述内侧为平面,所述外侧为曲面,所述平面开设有供语音识别模块嵌设的多个后盲孔,所述曲面开设有多个收音孔,所述收音孔包括同轴设置的敞口段、束音段和稳音段,所述稳音段连接于所述后盲孔,所述后盲孔与所述稳音段同向设置,所述束音段具有相对的一外端和一内端,所述内端连接于所述后盲孔,所述收音孔的内径自所述内端向所述外端逐渐增大,所述敞口段连接于所述外端,所述敞口段的上部侧壁形成有缺口,多个所述收音孔的体积相等。
进一步的,所述稳音段的内径小于所述后盲孔的内径。
进一步的,所述稳音段为等径孔,所述稳音段的内径适配于所述内端的内径。
进一步的,所述敞口段具有相对的第一端和第二端,所述敞口段连接于所述外端,所述敞口段的内壁的环向长度自所述第二端向所述第一端逐渐变长。
本发明的有益效果在于,本发明的用于安装多唛语音识别模块的机器人外壳结构,通过对需要安装多唛语音识别模块的机器人外壳的收音孔的外侧增加敞口段,解决了安装固定多唛语音识别模块的外壳为变化曲面时,多个前开孔大小及深度不一致对多唛语音识别模块的不良影响,保证了模块语音识别效果,通过在多个收音孔的外端增设的敞口段且多个收音孔的体积相等来保证多唛语音识别模块的语音识别效果。本发明的用于安装多唛语音识别模块的机器人外壳结构适用于多类型排布的多唛语音识别模块,如单排的、环形的、亦或是各种异形排布的多唛语音识别模块。
附图说明
通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它特征、目的和优点将会变得更明显:
图1为本发明实施例的用于安装多唛语音识别模块的机器人外壳结构的结构示意图。
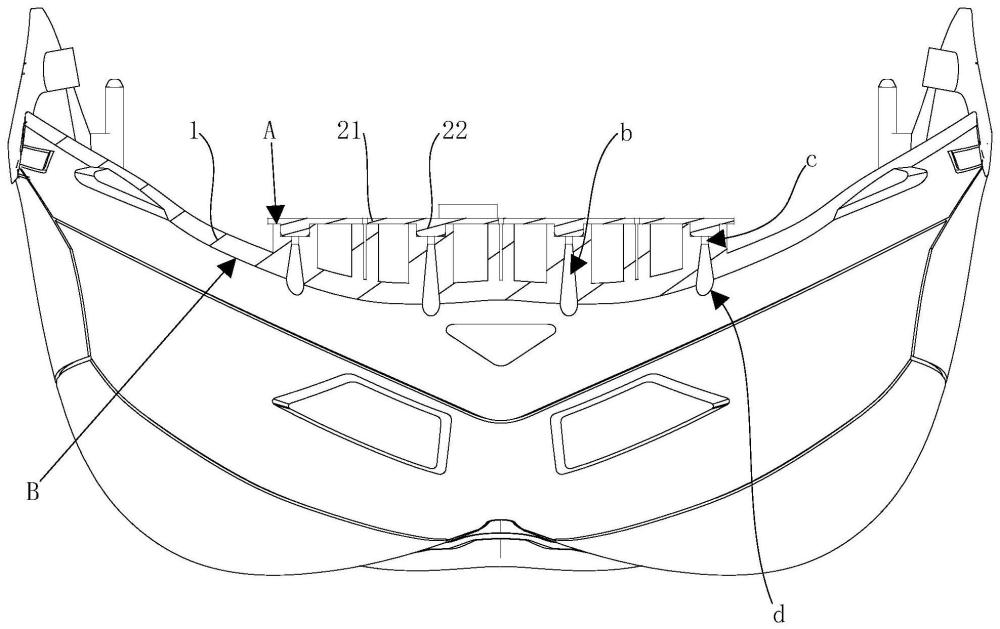
图2为本发明实施例的用于安装多唛语音识别模块的机器人外壳结构的主视图。
图3为图2中X-X处的剖视图。
图4为本发明实施例的前开孔的结构示意图。
图5为图2中Y-Y处的剖视图。
图6为图5中的Z处的局部放大示意图。
图7为本发明实施例的语音识别模块的单排布设的结构示意图。
图8为本发明实施例的语音识别模块的环形布设的结构示意图。
具体实施方式
下面结合附图和实施例对本申请作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
参照图1至图8所示,本发明提供了一种用于安装多唛语音识别模块的机器人外壳结构,包括外壳本体1。外壳本体1具有在外壳本体1的厚度方向上相对的内侧和外侧。内侧为平面A。外侧为曲面B。平面A开设有供语音识别模块2嵌设的多个后盲孔a。曲面B开设有多个收音孔。
具体的,在本实施例中,收音孔包括同轴设置的敞口段d、束音段b和稳音段c。
稳音段c连接于后盲孔。后盲孔与稳音段同向设置。
束音段b具有相对的一外端和一内端。束音段b的内端连接于后盲孔。收音孔的内径自束音段b的内端向束音段b的外端逐渐增大。
敞口段连接于束音段b的外端。敞口段的上部侧壁形成有缺口。
多个收音孔的体积相等。
在本实施例中,所述敞口段具有相对的第一端和第二端。所述敞口段连接于所述外端。所述敞口段的内壁的环向长度自所述第二端向所述第一端逐渐变长。
束音段b连通于后盲孔a。后盲孔a与束音段b同向设置。束音段b的孔口处形成有敞口段d。多个束音段b上的敞口段d的截面积相等。
在本实施例中,参阅图3、图7和图8所示,语音识别模块2包括PCB板21(PrintedCircuit Board,即印制电路板)和多个麦克风22。麦克风22连接于PCB板21。如图7所示,多个麦克风沿PCB板的长度方向间隔设置,呈单排设置。如图8所示,多个麦克风沿PCB板的周向方向间隔设置,呈环形布设。
本发明的用于安装多唛语音识别模块的机器人外壳结构,通过对需要安装多唛语音识别模块的机器人外壳的收音孔的外侧增加敞口段,解决了安装固定多唛语音识别模块的外壳为变化曲面时,多个前开孔大小及深度不一致对多唛语音识别模块的不良影响,保证了模块语音识别效果,通过在多个收音孔的外端增设的敞口段且多个收音孔的体积相等来保证多唛语音识别模块的语音识别效果。本发明的用于安装多唛语音识别模块的机器人外壳结构适用于多类型排布的多唛语音识别模块,如单排的、环形的、亦或是各种异形排布的多唛语音识别模块。
在本实施例中,后盲孔a与稳音段、束音段b同轴设置。稳音段的内径小于后盲孔的内径。稳音段设置于后盲孔的中轴线处。
具体的,参阅图3所示,束音段b具有相对的一外端和一内端。内端连接于后盲孔a。束音段b的内径自内端向外端逐渐增大。其中,束音段b的内端的内径小于后盲孔a的内径。束音段的内径渐变。
作为一种较佳的实施方式,束音段b通过稳音段c连通于后盲孔a,稳音段c为等径孔。稳音段c的内径适配于内端的内径。
在本实施例中,外壳本体为躯干的前胸部位。多唛语音识别模块安装于外壳本体的上部。多唛语音识别模块为单排式布设。稳音段c与后盲孔a同轴设置。束音段将声音进行收束汇聚至稳音段中,经稳音段将稳定的声音传送至后盲孔中的麦克风采集音频信息。敞口段作为束音段的前置结构,使得在曲面结构上的多个前开孔的体积相等,进而确保前开孔开设在曲面上且深度不一情况下,保证麦克风收音采集音频信号的稳定效果一致,进而确保语言识别效果。
以上描述仅为本申请的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本申请中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本申请中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
- 一种用于机器人的模块构件及机器人
- 一种用于巡检机器人的北斗定位模块的安装结构
- 蒸汽驱动的气缸模块及其用于机器人的安装结构