P挡执行装置和具有P挡执行装置的车辆
文献发布时间:2023-06-19 19:18:24
技术领域
本公开涉及汽车和自动驾驶领域,具体涉及驻车机构领域,尤其涉及一种P挡执行装置和具有P挡执行装置的车辆。
背景技术
P挡执行机构是一种驻车机构,用于在车辆驻车时对车辆的车轮进行制动。现有的P挡执行机构结构臃肿,在车辆上占用的安装空间较大。
发明内容
本公开提供了一种P挡执行装置和具有P挡执行装置的车辆。
根据第一方面,提供了一种P挡执行装置,包括:运动组件、驱动组件和棘轮;运动组件的上段可移动设置于驱动组件内,驱动组件基于磁阻最小原理驱动运动组件相对于驱动组件移动;在运动组件的移动过程中,运动组件的下段与棘轮之间在锁止状态和分离状态之间变化。
根据第二方面,提供了一种具有P挡执行装置的车辆,车辆上设置有第一方面任一实现方式描述的P挡执行装置。
根据本公开的技术,提供了一种P挡执行装置,通过驱动组件和转动组件之间的可移动连接方式,将驱动组件基于磁阻最小原理而驱动的运动组件的轴向转动,改变为运动组件相对于驱动组件的移动,从而使得运动组件的下段与棘轮之间在锁止状态和分离状态之间变化,实现车辆的驻车过程,由于驱动组件直接驱动转动组件,减少了传递机构,P挡执行装置结构简单,所需安装空间小,并同时减少了驻车所用时间,提高了驻车响应速度。
应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
附图说明
附图用于更好地理解本方案,不构成对本公开的限定。其中:
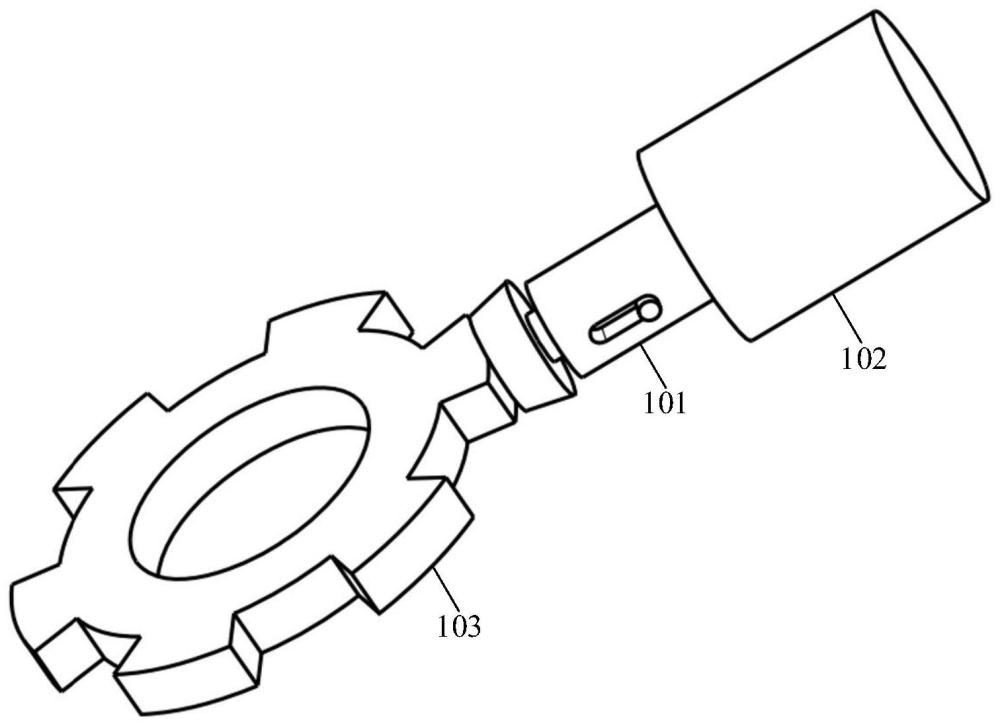
图1是根据本公开的示出了P挡执行装置的结构示意图;
图2是根据本实施例的P挡执行装置的剖面图;
图3A-3B是根据本实施例的磁阻力矩的产生示意图;
图4是根据本实施例的P挡执行装置在锁止状态下的结构示意图;
图5是根据本实施例的P挡执行装置在分离状态下的结构示意图;
图6是根据本实施例的P挡执行装置在特殊状态下的结构示意图。
具体实施方式
以下结合附图对本公开的示范性实施例做出说明,其中包括本公开实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本公开的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
本公开的技术方案中,所涉及的用户个人信息的收集、存储、使用、加工、传输、提供和公开等处理,均符合相关法律法规的规定,且不违背公序良俗。
参考图1,示出了P挡执行装置的结构示意图。P挡执行装置中包括:运动组件101、驱动组件102和棘轮103。运动组件101的上段可移动设置于驱动组件102内,驱动组件102基于磁阻最小原理驱动运动组件101相对于驱动组件102移动;在运动组件102的移动过程中,运动组件101的下段与棘轮103之间在锁止状态和分离状态之间变化。
磁阻最小原理表征,磁通总是沿着磁导最小的路径闭合,从而产生磁拉力,进而形成磁阻性质的电磁转矩,也即,磁力线具有力图缩短磁通路径以减小磁阻和增大磁导的本性。基于磁拉力,可以使得运动组件101在驱动组件102中转动,并基于运动组件101和驱动组件102之间的可移动连接方式,将运动组件101的轴向转动改变为轴向移动。相反方向的两个轴向转动过程,可被改变为相反方向的轴向移动。例如,顺时针方向的轴向转动被转变为向下的轴向移动,逆时针方向的轴向转动被转变为向上的轴向移动。
运动组件101的轴向移动,使得运动组件的下段向外伸长,或向内收缩,以实现运动组件101的下段与棘轮103之间,在锁止状态和分离状态之间变化。而棘轮103可固定设置于车辆的动力总成的转轴上,从而实现车辆的驻车状态和非驻车状态的变化。
本实施例中,可以基于螺旋机构,实现运动组件101和驱动组件102之间的可移动连接方式。作为示例,驱动组件内部设置与运动组件适配的容纳腔,容纳腔的轴心设置有连接轴;运动组件内设置有与连接轴适配的连接腔;将运动组件设置于驱动组件的容纳腔内,并且,驱动组件的连接轴设置于运动组件的连接腔内,驱动组件的连接轴通过螺旋机构与运动组件的连接腔的腔壁可移动连接。从而,运动组件在驱动组件中的轴向转动变为相对于驱动组件的移动。
本实施例中,提供了一种P挡执行装置,通过驱动组件和转动组件之间的可移动连接方式,将驱动组件基于磁阻最小原理而驱动的运动组件的轴向转动,改变为运动组件相对于驱动组件的移动,从而使得运动组件的下段与棘轮之间在锁止状态和分离状态之间变化,实现车辆的驻车过程,由于驱动组件直接驱动转动组件,减少了传递机构,P挡执行装置结构简单,所需安装空间小,并同时减少了驻车所用时间,提高了驻车响应速度。
继续参考图2,示出了P挡执行装置中的驱动组件的剖面图。驱动组件102内轴向设置有多个驱动凸起1021,驱动凸起上设置有磁阻线圈1022;运动组件101的上段设置有与多个驱动凸起1021适配的多个运动凸起1011。
本实现方式中,运动组件和驱动组件采用双凸极结构,可用导磁材质制作而成。
继续参考图3A-3B,示出了磁阻力矩的产生示意图。当运动组件的直轴(d轴)与运动组件的磁极中心线重合时,磁力线和直轴平行通过运动组件运动凸起和驱动组件的驱动凸起之间的气隙。但当运动组件处于图3B所示的位置时,磁力线被扭斜,而磁力线的闭合回路磁阻应最小,所以产生一个切向力F,也即磁拉力,在切向力F的作用下,运动组件沿逆时针方向转动,力求回到图3A的状态。当运动组件为三相、二相或单相电容分相运行时,在空间产生一个旋转磁场,旋转磁场的旋转可以具体表现为磁极N、S在空间旋转,在切向力F作用下转子沿旋转磁场方向旋转。
如图2所示的驱动组件中,包括8个驱动凸起,8个驱动凸起共组成4个驱动凸起对。每个驱动凸起对中包括相对的两个驱动凸起。在具体实现过程中,通过对4个驱动凸起对分别通电,便可实现旋转磁场,从而控制运动组件的转动。
本实现方式中,为了磁场控制的便捷性,多个驱动凸起均匀设置于驱动组件的内表面,多个运动凸起均匀设置于运动组件的外周。需要说明的是,驱动组件的驱动凸起的数量并不限于是8,运动组件的运动凸起的数量并不局限于6。例如,驱动组件的驱动凸起的数量、运动组件的运动凸起的数量还可以分别是10、8。
本实现方式中,提供了运动组件和驱动组件关于磁阻最小原理的实现方式,以驱动运动组件相对于驱动组件移动,结构简单,可以快速地驱动运动组件转动,进一步提高了驻车响应速度。
继续参考图4-6,示出了P挡执行装置在不同状态下的结构示意图。
在本实施例的一些可选的实现方式中,运动组件101的上段的顶部采用螺纹连接方式与驱动组件102活动连接。
作为示例,运动组件的上段的顶部的外表面、驱动组件顶部的内表面设置有相适配的螺纹。
本实现方式中,基于螺纹连接方式实现运动组件和驱动组件之间的可移动连接,便于实现运动组件由转动过程变为移动过程的精细化控制,有助于进一步提高运动组件的可控性和精确度。
在本实施例的一些可选的实现方式中,运动组件101包括运动件1012、弹性件1013和滑杆1014。运动件102的一端可移动设置于驱动组件内,运动件的另一端延伸至驱动组件102外;运动件101的另一端通过弹性件1013与滑杆1014连接。
具体的,运动件1012采用圆柱体结构,运动件1012的外表面轴向均匀设置有多个运动凸起。弹性件可以是提供弹性的器件,例如,弹簧。通过弹性件1013缓冲滑杆1014对棘轮103的施加压力,在保证实现运动组件和棘轮之间的锁止状态的同时,保护了运动组件和棘轮,有助于提高P挡执行装置的使用寿命。
在本实施例的一些可选的实现方式中,运动件1012的另一端的内部轴向设置有与滑杆1014适配的滑腔1015;运动件1012通过设置于滑腔1015中的弹性件1013与滑杆1014活动连接。
通过滑腔1015对滑杆的限制,使得滑杆1014只能顺着滑腔1015上下移动,在通过弹性件1013缓冲滑杆1014与棘轮103之间的施加压力的同时,限定了滑杆1014的伸缩方向,提高了伸缩过程的有效性。
在本实施例的一些可选的实现方式中,滑杆1014上靠近棘轮103的端部,设置有与棘轮103的凹槽适配的滑杆凸起。
本实现方式中,滑杆凸起与棘轮的凹槽适配,使得在锁止状态下,P挡执行装置牢靠地与棘轮抵接,提高了锁止状态下的P挡执行装置的可靠性。
在本实施例的一些可选的实现方式中,P挡执行装置还包括:磁性检测组件104。磁性检测组件104包括磁性件1041和磁性检测件1042;磁性件1041设置于运动组件101的上段的顶部;磁性检测件1042设置于驱动组件102内,靠近运动组件101的上段的顶部设置。
当运动组件2上的磁性件1041靠近或远离磁性检测件1042时,磁性检测件1042可以确定出磁性件1041的位置,从而可以向整车控制器反馈P挡执行装置处于解除状态还是分离状态。
本实现方式中,P挡执行装置中设置有用于反馈P挡的解除状态或分离状态的磁性检测组件,以及时反馈P挡执行装置的当前状态,提高了P挡执行装置的智能化程度。
在本实施例的一些可选的实现方式中,P挡执行装置还包括:手动驱动组件105。手动驱动组件包括:手动驱动摇杆和驱动槽1051;驱动槽1051设置于运动组件101的上段的顶部;手动驱动摇杆上设置有与驱动槽1051适配的驱动部。
在异常情况下,车辆因故障可能无法自动切换至非P挡状态,也即运动组件与棘轮之间的分离状态,此时,可以将手动驱动摇杆的驱动部插入到驱动槽中,通过转动手动驱动摇杆,转动运动组件,使得锁止状态下的运动组件与棘轮分离,使车辆切换至非P挡状态。
本实现方式中,P挡执行装置中包括手动驱动组件,以保证车辆异常状态下的P挡状态切换过程,支持手动解锁功能,解决了车辆因故障无法切换至非P挡状态,无法移动车辆的技术问题。
在本实施例的一些可选的实现方式中,驱动组件上靠近驱动槽的端部可开合设置有驱动组件封装壳1043。在车辆正常状态下,驱动组件封装壳1043扣合在驱动组件102上,以保护驱动组件102和运动组件101;在车辆非正常状态下,车辆使用人员可以打开驱动组件封装壳1043,通过转动手动驱动摇杆,带动运动组件101转动,使得锁止状态下的运动组件101与棘轮103分离,使车辆切换至非P挡状态。
本实现方式中,基于驱动组件上可开合的驱动组件封装壳,进一步提高了P当执行装置的实用性和手动驱动的便捷性。
在本实施例的一些可选的实现方式中,P挡执行装置还包括:低压线束接插件1044;低压线束接插件与驱动组件连接,用于为驱动组件中的磁阻线圈供电。
作为示例,低压线束接插件1044可以设置于驱动组件封装壳上,并与磁阻线圈的供电控制电路连接,以向驱动组件中的多个驱动凸起对中的目标驱动凸起对上的磁阻线圈通电。
本实现方式中,基于低压线束接插件为驱动组件的磁阻线圈通电,提高了P挡执行装置的供电的有效性和可靠性。
继续参考图4,示出了P挡执行装置在锁止状态下的结构示意图。驱动组件102通过低压线束接插件1044与外界连接,获得外部电源,以驱动运动组件101转动,运动组件101基于其与驱动组件102的螺纹连接方式,将轴线转动过程转换为轴向的向下移动过程,滑杆1014的滑杆凸起卡入棘轮103的凹槽中,使得P挡执行装置处于锁止状态。此时,检测组件104中的磁性件1041和磁性检测件1042分离,磁性检测件1042可确定出磁性件1041所在的第一位置,向整车控制器反馈P挡执行装置处于锁止状态。
继续参考图5,示出了P挡执行装置在分离状态下的结构示意图。驱动组件102通过低压线束接插件1044与外界连接,获得外部电源,以驱动运动组件101反向转动,运动组件101基于其与驱动组件102的螺纹连接方式,将轴线转动过程转换为轴向的向上过程,滑杆1014的滑杆凸起从棘轮103的凹槽退回,使得P挡执行装置处于分离状态。此时,检测组件104中的磁性件1041和磁性检测件1042相近,磁性检测件1042可确定出磁性件1041所在的第二位置,向整车控制器反馈P挡执行装置处于分离状态。
继续参考图6,示出了P挡执行装置在特殊状态下的结构示意图。因为棘轮103与车辆的动力总成中的转轴固定连接,会随着动力总成的转轴的旋转而旋转,所以会发生棘轮103的凸起与滑杆1014的滑杆凸起相对的情况,无法完成P挡执行装置的锁止。此时,由于运动组件101中的运动件1012的顶部的螺纹设计,运动件1012自锁,并不会向上移动。滑杆1014被棘轮103的凸起部分顶住,回退到运动件1012的滑腔1015内并压缩弹性件1013。当车辆车轮发生运动时,带动动力总成的转轴旋转。由于棘轮103与动力总成的转轴固定连接,因此,棘轮103也会旋转。当棘轮103的凹槽与滑杆1014的滑杆凸起相对时,滑杆1014在弹性件1013的弹力作用下,滑入棘轮103的凹槽内,完成P挡执行装置的锁止。
本实施例中提供了一种具有P挡执行装置的车辆,车辆上设置有上述实施例所表征的P挡执行装置。
本实施例中,P挡执行装置中的棘轮固定设置于车辆的动力总成的转轴上,当运动组件与棘轮之间处于锁止状态时,车辆处于驻车状态;当运动组件与棘轮之间处于分离状态时,车辆处于可移动状态。
本实现方式中,车辆可以基于较小的安装空间安装P挡执行装置,由于P挡执行装置中的驱动组件直接驱动转动组件,减少了传递机构,减少了车辆的驻车所用时间,提高了驻车响应速度。
上述具体实施方式,并不构成对本公开保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本公开的精神和原则之内所作的修改、等同替换和改进等,均应包含在本公开保护范围之内。
- 车辆的变速器P挡解锁装置以及车辆
- 一种具有自动挡气装置的茶叶加工设备
- 一种车辆随行止动轮挡装置
- 车辆的制动和挡位装置
- 一种P挡执行装置故障处理方法及P挡执行装置
- 具有用于选择和切换机动车变速器装置的挡位的滑槽的单马达变速器执行器