车辆的控制方法
文献发布时间:2024-01-17 01:14:25
技术领域
本发明涉及车辆技术领域,尤其是涉及一种车辆的控制方法。
背景技术
相关技术中的车辆通常将氢燃料发动机的工作功率和电池的剩余电量进行关联,但是,仅通过将氢燃料发动机的工作功率和电池的剩余电量单一关联,在车辆的状态变化时,例如车辆由停车状态切换至正常行驶状态,或者由行驶状态切换至停车状态时,容易出现电池的剩余电量快速波动的现在,导致电池的电量下降速率会较快,无法使电池维持在高效的工作区间,而且氢燃料发动机的经济效率也较低。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种车辆的控制方法,该车辆的控制方法能够动态监测车辆状态,有利于提高电池和氢燃料发动机的工作效率和经济效率。
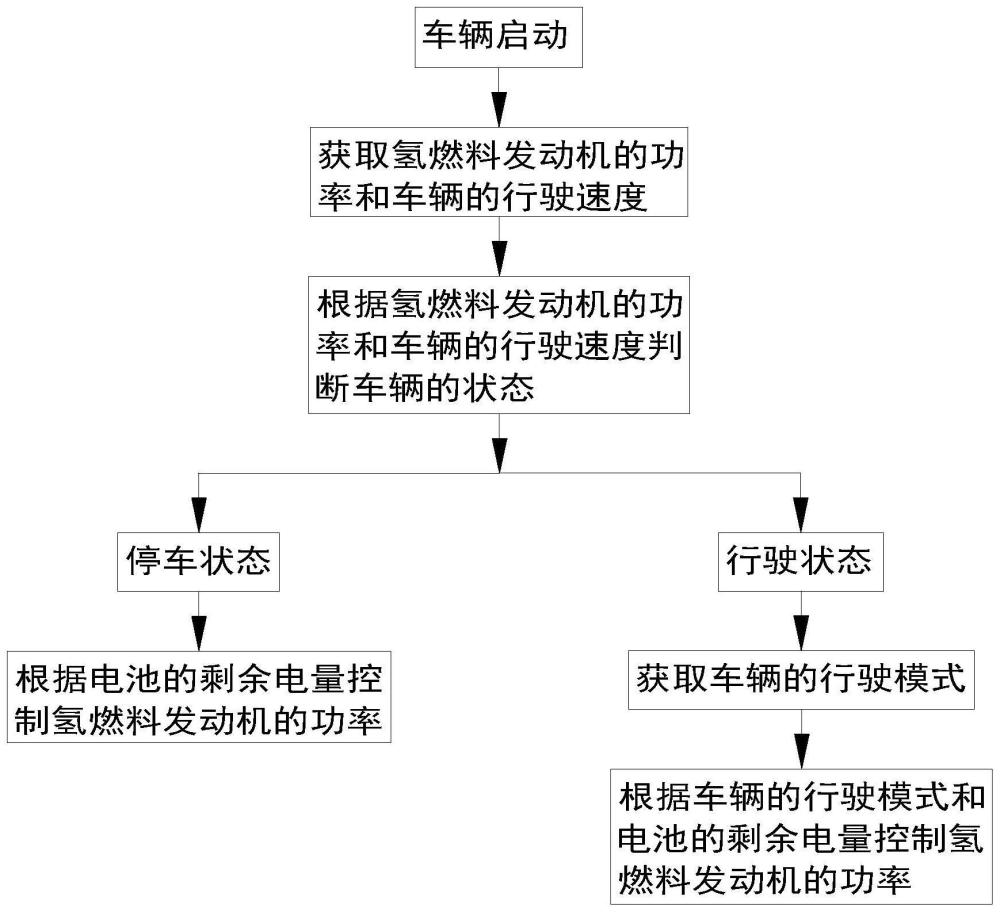
为了实现上述目的,根据本发明实施例提出了一种车辆的控制方法,包括:车辆启动;获取氢燃料发动机的功率和所述车辆的行驶速度,并根据所述氢燃料发动机的功率和所述车辆的行驶速度判断所述车辆的状态;若所述车辆处于停车状态,则根据电池的剩余电量控制氢燃料发动机的功率;若所述车辆处于行驶状态,则获取所述车辆的行驶模式,并根据所述车辆的行驶模式和所述电池的剩余电量控制所述氢燃料发动机的功率。
根据本发明实施例的车辆的控制方法能够动态监测车辆状态,有利于提高电池和氢燃料发动机的工作效率和经济效率。
根据本发明的一些实施例,所述获取车辆的状态,包括:若满足以下条件,则判断所述车辆处于停车状态;所述氢燃料发动机的功率小于预设停车功率;所述车辆的行驶速度小于第一预设速度且持续预设停车时间。
根据本发明的一些实施例,所述获取车辆的状态,还包括:若所述车辆的行驶速度不小于第二预设速度,则判断所述车辆处于行驶状态;其中,所述第二预设速度不小于所述第一预设速度。
根据本发明的一些实施例,所述若所述车辆处于停车状态,则根据电池的剩余电量控制氢燃料发动机的功率,包括:若所述电池的剩余电量不小于80%,则氢燃料发动机以第一预设功率运行且持续第一预设时间后停机;若所述电池的剩余电量不小于30%小于80%,则氢燃料发动机以第二预设功率运行;若所述电池的剩余电量小于30%,则氢燃料发动机以第三预设功率运行;其中,第一预设功率、第二预设功率和所述第三预设功率依次增大。
根据本发明的一些实施例,所述若所述车辆处于行驶状态,则获取所述车辆的行驶模式,并根据所述车辆的行驶模式和所述电池的剩余电量控制所述氢燃料发动机的功率,包括:在行驶状态下,获取每次制动踏板的开度不大于预设开度的持续时间,记作第一持续时间,并计算多次所述第一持续时间的平均值,记作第一平均值;在行驶状态下,获取每次所述车辆的速度不小于预设行驶速度的持续时间,记作第二持续时间,并计算多次所述第二持续时间的平均值,记作第二平均值;若所述第一平均值大于第二预设时间且所述第二平均值大于第三预设时间,则所述行驶模式为高速模式;若所述第一平均值大于第二预设时间且所述第二平均值小于第三预设时间,则所述行驶模式为低速匀速模式;若所述第一平均值小于第二预设时间且所述第二平均值小于第三预设时间,则所述行驶模式为低速模式。
根据本发明的一些实施例,在行驶状态下,在首次获取所述第一持续时间前,所述第一平均值取第一时间值;其中,所述第一时间值不小于所述第二预设时间。
根据本发明的一些实施例,在行驶状态下,若所述车辆的速度小于预设行驶速度且持续第二时间值,则记录所述车辆的速度不小于预设行驶速度的持续时间为0。
根据本发明的一些实施例,所述若所述车辆处于行驶状态,则获取所述车辆的行驶模式,并根据所述车辆的行驶模式和所述电池的剩余电量控制所述氢燃料发动机的功率,还包括:若满足以下条件,则判断所述车辆的行驶模式;相邻两次所述第一持续时间的差值的绝对值小于第一误差值;相邻两次所述第二持续时间的差值的绝对值小于第二误差值。
根据本发明的一些实施例,所述若所述车辆处于行驶状态,则获取所述车辆的行驶模式,并根据所述车辆的行驶模式和所述电池的剩余电量控制所述氢燃料发动机的功率,还包括:获取所述氢燃料发动机的实时功率,且间隔预设工作时间计算所述氢燃料发动机的实时功率的平均值,记作第三平均值;所述氢燃料发动机具有多个高效功率值,多个所述高效功率值中的一个邻近所述第三平均值且小于所述第三平均值,将所述一个高效功率值记作优选功率值。
根据本发明的一些实施例,所述若所述车辆处于行驶状态,则获取所述车辆的行驶模式,并根据所述车辆的行驶模式和所述电池的剩余电量控制所述氢燃料发动机的功率,还包括:若所述行驶模式为高速模式且所述电池的剩余电量不小于50%,则氢燃料发动机以所述优选功率值运行;若所述行驶模式为高速模式且所述电池的剩余电量小于50%,则氢燃料发动机以最大功率运行。
根据本发明的一些实施例,所述若所述车辆处于行驶状态,则获取所述车辆的行驶模式,并根据所述车辆的行驶模式和所述电池的剩余电量控制所述氢燃料发动机的功率,还包括:若所述行驶模式为低匀速模式且所述电池的剩余电量不小于80%,则氢燃料发动机以第四预设功率运行;若所述行驶模式为低匀速模式且所述电池的剩余电量不小于70%且小于80%,则氢燃料发动机以所述优选功率值运行;若所述行驶模式为低匀速模式且所述电池的剩余电量不小于50%且小于70%,则氢燃料发动机以第五预设功率运行;若所述行驶模式为低匀速模式且所述电池的剩余电量不小于30%且小于50%,则氢燃料发动机以第六预设功率运行;若所述行驶模式为低匀速模式且所述电池的剩余电量小于30%,则氢燃料发动机以最大功率运行;其中,所述第四预设功率、所述第五预设功率和所述第六预设功率依次增大。
根据本发明的一些实施例,所述若所述车辆处于行驶状态,则获取所述车辆的行驶模式,并根据所述车辆的行驶模式和所述电池的剩余电量控制所述氢燃料发动机的功率,还包括:若所述行驶模式为低速模式且所述电池的剩余电量不小于70%,则氢燃料发动机以第七预设功率运行;若所述行驶模式为低速模式且所述电池的剩余电量不小于50%且小于70%,则氢燃料发动机以第八预设功率运行;若所述行驶模式为低速模式且所述电池的剩余电量不小于30%且小于50%,则氢燃料发动机以所述第四预设功率运行;若所述行驶模式为低速模式且所述电池的剩余电量不小于10%且小于30%,则氢燃料发动机以所述第六预设功率运行;若所述行驶模式为低速模式且所述电池的剩余电量小于10%,则氢燃料发动机以最大功率运行;其中,所述第七预设功率、所述第八预设功率、所述第四预设功率、所述第五预设功率和所述第六预设功率依次增大。
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
图1是根据本发明实施例的车辆的控制方法的流程图。
图2是根据本发明实施例的车辆的控制方法的另一流程图。
图3是根据本发明实施例的车辆的控制方法的获取第一平均值和第二平均值的流程图。
图4是根据本发明实施例的车辆的控制方法的获取优选功率值的流程图。
图5是根据本发明实施例的车辆的控制方法的在高速模式下的流程图。
图6是根据本发明实施例的车辆的控制方法的在低匀速模式下的流程图。
图7是根据本发明实施例的车辆的控制方法的在低速模式下的流程图。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,“第一特征”、“第二特征”可以包括一个或者更多个该特征。
在本发明的描述中,“多个”的含义是两个或两个以上,“若干”的含义是一个或多个。
下面参考附图描述根据本发明实施例的车辆的控制方法。
如图1-图7所示,根据本发明实施例的车辆的控制方法包括:
车辆启动;
获取氢燃料发动机的功率和车辆的行驶速度,并根据氢燃料发动机的功率和车辆的行驶速度判断车辆的状态;
若车辆处于停车状态,则根据电池的剩余电量控制氢燃料发动机的功率;
若车辆处于行驶状态,则获取车辆的行驶模式,并根据车辆的行驶模式和电池的剩余电量控制氢燃料发动机的功率。
需要说明的是,本发明实施例中的车辆的氢燃料发动机只能给电池供电,再通过电池的电量驱动车辆行驶,也就是说,本发明实施例中的氢燃料发动机只会将氢能燃烧转化为电能,再通过电驱动车辆行驶。
根据本发明实施例的车辆的控制方法,通过获取氢燃料发动机的功率和车辆的行驶速度,并根据氢燃料发动机的功率和车辆的行驶速度判断车辆的状态,这样,整车控制器可以结合车辆的行驶速度和氢燃料发动机的功率来判断车辆的行驶状态,从而可以判断出车辆是处于停车状态还是行驶状态,以便于整车控制器根据车辆的状态调节氢燃料发动机的功率,从而避免电池的电量快速下降,以使电池的剩余电量可以维持在高效的工作区间,同时可以调整氢燃料发动机在高能量回收场景下的功率占比,有利于提高电机能量回收性能。
若车辆处于停车状态,则根据电池的剩余电量控制氢燃料发动机的功率,需要说明的是,本发明实施例中的停车状态指的是,车辆启动,车辆处于静止状态或者车辆处于行驶速度很慢的状态,此时通过控制氢燃料发动机的功率,可以避免氢燃料发动机的功率过大,进而可以避免电池的剩余电量过高,氢燃料发动机可以稳定地为电池进行低速率的充电,以使电池的电量可以保持在高效的工作区间,且避免电池出现过充,而当电池的剩余电量较小时,氢燃料发动机可以以较大的功率运行,进而可以为电池进行高速率的充电,避免电池的电量过低。
若车辆处于行驶状态,则获取车辆的行驶模式,并根据车辆的行驶模式和电池的剩余电量控制氢燃料发动机的功率,这样,在车辆正常行驶时,氢燃料发动机可以为电池充电,进而可以避免电池的剩余电量持续下降,以使电池的剩余电量能够维持在高效的工作区间,避免电池的剩余电量过低,电池的充放电性能都较好,且整个系统可以处于非受限模式,电池和氢燃料发动机能够高效驱动车辆行驶,从而可以提高氢燃料发动机和电池的工作效率,且通过调整氢燃料发动机在高能量回收场景下的功率占比,有利于提高电机能量回收性能,进而可以提高氢燃料发动机的经济效率。
由此,通过区分车辆处于不同的行驶模式,再结合车辆的行驶模式和电池的剩余电量来控制氢燃料发动机的功率,可以使氢燃料发动机的功率运行更加合适,既能够稳定地为电池充电,避免电池电量过高或者过低,以使电池的剩余电量可以处于高效的充放电区间,同时可以满足车辆的行驶需求,驾驶体验更好。
如此,根据本发明实施例的车辆的控制方法能够动态监测车辆状态,有利于提高电池和氢燃料发动机的工作效率和经济效率。
在本发明的一些具体实施例中,如图2所示,获取车辆的状态,包括:
若满足以下条件,则判断车辆处于停车状态;
氢燃料发动机的功率小于预设停车功率;
车辆的行驶速度小于第一预设速度且持续预设停车时间。
举例而言,预设停车功率可以为20kw,第一预设速度可以为1km/h,预设停车时间可以为2min。这样,当氢燃料发动机的功率小于20kw且车辆以小于1km/h的行驶速度持续两分钟,则表示氢燃料发动机的功率较低且车辆的行驶速度较慢,此时可以判断车辆处于停车状态,进而可以根据电池的剩余电量控制氢燃料发动机的功率,避免氢燃料发动机的功率过大,避免电池的剩余电量过高,氢燃料发动机可以稳定地为电池进行低速率的充电,以使电池的电量可以保持在高效的工作区间。
在本发明的一些具体实施例中,如图2所示,获取车辆的状态,还包括:
若车辆的行驶速度不小于第二预设速度,则判断车辆处于行驶状态;
其中,第二预设速度不小于第一预设速度。
举例而言,第二预设速度可以为3km/h。也就是说,当车辆的行驶速度不小于3km/h时,则表示车辆已经在正常行驶,此时可以判断车辆处于行驶状态,并获取车辆的行驶模式,再根据车辆的行驶模式和电池的剩余电量来控制氢燃料发动机的功率。通过将第二预设速度不小于第一预设速度,这样第一预设速度和第二预设速度之间会存在一定的间隔,当车辆的速度在第一预设速度附近或者在第二预设速度附近来回跳动时,可以避免车辆的状态在行驶状态和停车状态之间来回切换。
具体地,当车辆为停止状态时,若车辆的速度在第一预设速度的上下跳动但未达到第二预设速度时,则车辆一直保持为停止状态,直至车辆速度达到第二预设速度,车辆的状态切换为行驶状态;同理,当车辆为行驶状态时,若车辆的速度在第二预设速度的上下跳动但未下降到第一预设速度时,则车辆一直保持为行驶状态,直至车辆速度下降到第二预设速度,车辆的状态切换为停车状态。
在本发明的另一些具体实施例中,第一预设速度也可以大于3km/h,举例而言,第一预设速度可以为5km/h,第二预设速度可以为3km/h,这样,第一预设速度和第二预设速度之间也会有间隔,当车辆为停止状态时,若车辆的速度达到3km/h但未超出5km/h,车辆则一直保持为停止状态,直至车辆速度超出5km/h,车辆的状态切换为行驶状态;同理,当车辆为行驶状态时,若车辆的速度达到5km/h但未下降到3km/h时,则车辆一直保持为行驶状态,直至车辆速度下降到3km/h,车辆的状态切换为停车状态,进而也可以避免车辆的状态在行驶状态和停车状态之间来回切换。
在本发明的一些具体实施例中,如图2所示,若车辆处于停车状态,则根据电池的剩余电量控制氢燃料发动机的功率,包括:
若电池的剩余电量不小于80%,则氢燃料发动机以第一预设功率运行且持续第一预设时间后停机;
若电池的剩余电量不小于30%小于80%,则氢燃料发动机以第二预设功率运行;
若电池的剩余电量小于30%,则氢燃料发动机以第三预设功率运行;
其中,第一预设功率、第二预设功率和第三预设功率依次增大。
举例而言,第一预设功率可以为20kw,第一预设时间可以为5min,第二预设功率可以为40kw,第三预设功率可以为100kw。
由此,当电池的剩余电量不小于80%,即电池剩余电量较高时,则氢燃料发动机可以以较低的功率运行,进而可以保证电池的剩余电量不会过高,以使电池的充放电性能都较好,且氢燃料发动机在运行第一预设时间后强制关闭,氢燃料发动机不再为电池充电,更有效地避免了电池的剩余电量过高。
若电池的剩余电量不小于30%小于80%,电池剩余电量处于高效区间时,则氢燃料发动机可以以中等功率运行,这样一方面可以实现氢燃料发动机低速率且稳定地为电池充电,避免电池电量过高,另一方面可以在车辆行驶加速时,氢燃料发动机的功率可以快速拉升,以满足车辆的行驶需求。
若电池的剩余电量小于30%,电池剩余电量较低时,则氢燃料发动机可以以较高的功率运行,进而可以快速地为电池充电,以使电池的剩余电量能够快速升高至30%~80%之间,以使电池的剩余电量提高至高效区间,有利于提高电池的工作效率。
在本发明的一些具体实施例中,如图3、图5-图7所示,若车辆处于行驶状态,则获取车辆的行驶模式,并根据车辆的行驶模式和电池的剩余电量控制氢燃料发动机的功率,包括:
在行驶状态下,获取每次制动踏板的开度不大于预设开度的持续时间,记作第一持续时间,并计算多次第一持续时间的平均值,记作第一平均值;
在行驶状态下,获取每次车辆的速度不小于预设行驶速度的持续时间,记作第二持续时间,并计算多次第二持续时间的平均值,记作第二平均值;
若第一平均值大于第二预设时间且第二平均值大于第三预设时间,则行驶模式为高速模式;
若第一平均值大于第二预设时间且第二平均值小于第三预设时间,则行驶模式为低速匀速模式;
若第一平均值小于第二预设时间且第二平均值小于第三预设时间,则行驶模式为低速模式。
举例而言,预设行驶速度可以为50km/h,第二预设时间可以为5s,第三预设时间可以为10min。
可以理解的是,预设开度可以为0,此时只要踩踏制动踏板,则车辆会开始制动,或者预设开度也可以为一个不为0的设定值,这样,当驾驶员踩踏制动踏板但制动踏板的开度不大于预设开度时,车辆不进行制动,这样设置可以避免出现误踩踏制动踏板的情况。
具体地,若只获取了一次制动踏板的开度不大于预设开度的持续时间,则该次获取的第一持续时间则为第一平均值;若获取了两次制动踏板的开度不大于预设开度的持续时间,则这两次第一持续时间的平均值记作第一平均值;若获取了多次制动踏板的开度不大于预设开度的持续时间,则多次第一持续时间的平均值记作第一平均值。
若只获取了一次车辆的速度不小于预设行驶速度的持续时间,则该次获取的第二持续时间则为第二平均值;若获取了两次车辆的速度不小于预设行驶速度的持续时间,则这两次第二持续时间的平均值记作第二平均值;若获取了多次车辆的速度不小于预设行驶速度的持续时间,则多次第二持续时间的平均值记作第二平均值。
需要说明的是,本发明实施例中所指的匀速是指,车辆行驶速度在一个设定的区间内波动。
也就是说,当车辆未进行制动的持续时间大于第二预设时间时,则可以表示在第一平均值的时间内,车辆未进行频繁的制动减速,车辆可以看做在匀速行驶。当车辆以大于预设行驶速度的速度行驶超过第三预设时间时,则表示车辆在高速行驶。
由此,当车辆未进行制动的持续时间大于第二预设时间且车辆以大于预设行驶速度的速度行驶超过第三预设时间,即车辆未进行制动的持续时间较长且车辆以大于预设行驶速度的速度行驶较长时,则可以判断车辆处于高速行驶模式。
当车辆未进行制动的持续时间大于第二预设时间且车辆以大于预设行驶速度的速度行驶不超过第三预设时间,即车辆未进行制动的持续时间较长但车辆以大于预设行驶速度的速度行驶较短时,则可以判断车辆处于低速匀速的行驶模式。
当车辆未进行制动的持续时间小于第二预设时间且车辆以大于预设行驶速度的速度行驶不超过第三预设时间,即车辆未进行制动的持续时间较短且车辆以大于预设行驶速度的速度行驶较短时,此时车辆以低速行驶,且车辆频繁进行制动减速,例如车辆可能在市区行驶且处于跟车状态,车辆需要进行频繁的加减速,则可以判断车辆处于低速的行驶模式。
在本发明的一些具体实施例中,在行驶状态下,在首次获取第一持续时间前,第一平均值取第一时间值;
其中,第一时间值不小于第二预设时间。
举例而言,第一时间值可以为6s,这样,若车辆处于行驶状态,且车辆行驶后驾驶员一直未踩踏制动踏板进行车辆制动,出现频繁加减速的情况,整车控制器可以将第一平均值取6s,也就是默认车辆处于匀速状态,从而可以结合第二平均值判断车辆处于高速模式或者低匀速模式,这样避免在首次获取第一持续时间前,第一平均值的取值存在空白期,以使整车控制器的控制逻辑更加完善,且对车辆的控制更加合理。
在本发明的一些具体实施例中,在行驶状态下,若车辆的速度小于预设行驶速度且持续第二时间值,则记录车辆的速度不小于预设行驶速度的持续时间为0。
举例而言,第二时间值可以为5min,也就是说,当车辆的行驶速度低于预设行驶速度且维持第二时间值后,则可以表示车辆在较长时间内以低速行驶,此时将该次第二持续时间记作0,可以拉低第二平均值的数值,进而使整车控制器对车辆的行驶模式的判断更加准确,有利于提高根据车辆的行驶模式和电池的剩余电量控制氢燃料发动机的功率的合理性,进一步提高了氢燃料发动机的工作效率和电池的工作效率。
在本发明的一些具体实施例中,如图5-图7所示,若车辆处于行驶状态,则获取车辆的行驶模式,并根据车辆的行驶模式和电池的剩余电量控制氢燃料发动机的功率,还包括:
若满足以下条件,则判断车辆的行驶模式;
相邻两次第一持续时间的差值的绝对值小于第一误差值;
相邻两次第二持续时间的差值的绝对值小于第二误差值。
举例而言,第一误差值可以为15s,第二误差值可以为20min,可以理解的是,若在采样阶段出现紧急制动的情况,车辆可以会在短时间内紧急刹车,此时相邻两次第一持续时间之间的差距会较大,以及相邻两次第二持续时间的差距会较大,通过设置第一误差值和第二误差值,可以提高对车辆的行驶模式判断的精准性。
在本发明的一些具体实施例中,如图4所示,若车辆处于行驶状态,则获取车辆的行驶模式,并根据车辆的行驶模式和电池的剩余电量控制氢燃料发动机的功率,还包括:
获取氢燃料发动机的实时功率,且间隔预设工作时间计算氢燃料发动机的实时功率的平均值,记作第三平均值;
氢燃料发动机具有多个高效功率值,多个高效功率值中的一个邻近第三平均值且小于第三平均值,将一个高效功率值记作优选功率值。
其中,高效功率值是指,氢燃料发动机以该功率值运行时,氢燃料发动机的氢能转换为电能的能量转化效率较高。
这样,整车控制器可以获取氢燃料发动机的实时功率的平均值,氢燃料发动机以与第三平均值相近的功率值运行,既可以避免电池电量过高,又可以满足车辆的行驶需求,由此,氢燃料发动机可以以与第三平均值相近的高效功率值运行,进而可以提高氢燃料发动机的氢能转化为电能的效率。
在本发明的一些具体实施例中,如图5所示,若车辆处于行驶状态,则获取车辆的行驶模式,并根据车辆的行驶模式和电池的剩余电量控制氢燃料发动机的功率,还包括:
若行驶模式为高速模式且电池的剩余电量不小于50%,则氢燃料发动机以优选功率值运行;
若行驶模式为高速模式且电池的剩余电量小于50%,则氢燃料发动机以最大功率运行。
这样,在车辆高速行驶且电池剩余电量较多时,氢燃料发动机可以优先使用优选功率值为电池供电,这样车辆可以利用氢燃料发动机的氢能转化为的电能来驱动车辆行驶,这样氢燃料发动机的可以稳定地为电池充电,电池的电量能够稳定在高效区间。
而当在车辆高速行驶且电池剩余电量较少时,氢燃料发动机可以使用最大功率运行,以为电池供电,这样车辆可以利用氢燃料发动机的氢能转化为的电能的一部分来驱动车辆行驶,且另一部分可以为电池充电,这样氢燃料发动机的可以在驱动车辆行驶的同时再提高电池的电量,以使电池的电量能够稳定在高效区间。
在本发明的一些具体实施例中,如图6所示,若车辆处于行驶状态,则获取车辆的行驶模式,并根据车辆的行驶模式和电池的剩余电量控制氢燃料发动机的功率,还包括:
若行驶模式为低匀速模式且电池的剩余电量不小于80%,则氢燃料发动机以第四预设功率运行;
若行驶模式为低匀速模式且电池的剩余电量不小于70%且小于80%,则氢燃料发动机以优选功率值运行;
若行驶模式为低匀速模式且电池的剩余电量不小于50%且小于70%,则氢燃料发动机以第五预设功率运行;
若行驶模式为低匀速模式且电池的剩余电量不小于30%且小于50%,则氢燃料发动机以第六预设功率运行;
若行驶模式为低匀速模式且电池的剩余电量小于30%,则氢燃料发动机以最大功率运行;
其中,第四预设功率、第五预设功率和第六预设功率依次增大。
举例而言,第四预设功率可以为60kw,第五预设功率可以为80kw,第六预设功率可以为100kw。
这样,当车辆以低匀速模式行驶且电池的剩余电量较多时,氢燃料发动机可以以中等功率值运行,进而可以控制电池的剩余电量的下降速率,且避免电池的剩余电量过高,以保证供需平衡。
而当电池的电量逐渐下降且电池的剩余电量不小于30%时,氢燃料发动机的功率可以逐渐增大,这样在驱动车辆行驶的同时,还可以利用氢燃料发动机为电池充电,并提高电池的电量,以使电池的剩余电量可以稳定在高效区间内,车辆的驱动性能更好。
而当电池剩余电量较少时,氢燃料发动机可以使用最大功率运行,以为电池供电,这样车辆可以利用氢燃料发动机的氢能转化为的电能的一部分来驱动车辆行驶,且另一部分可以为电池充电,这样氢燃料发动机的可以在驱动车辆行驶的同时再提高电池的电量,避免电池的电量下降至放电能力限制区间内,以使电池的电量能够稳定在高效区间。
在本发明的一些具体实施例中,如图7所示,若车辆处于行驶状态,则获取车辆的行驶模式,并根据车辆的行驶模式和电池的剩余电量控制氢燃料发动机的功率,还包括:
若行驶模式为低速模式且电池的剩余电量不小于70%,则氢燃料发动机以第七预设功率运行;
若行驶模式为低速模式且电池的剩余电量不小于50%且小于70%,则氢燃料发动机以第八预设功率运行;
若行驶模式为低速模式且电池的剩余电量不小于30%且小于50%,则氢燃料发动机以第四预设功率运行;
若行驶模式为低速模式且电池的剩余电量不小于10%且小于30%,则氢燃料发动机以第六预设功率运行;
若行驶模式为低速模式且电池的剩余电量小于10%,则氢燃料发动机以最大功率运行;
其中,第七预设功率、第八预设功率、第四预设功率、第五预设功率和第六预设功率依次增大。
举例而言,第七预设功率可以为20kw,第八预设功率可以为40kw。
这样,当车辆以低速模式行驶且电池的剩余电量较多时,由于在该模式下,车辆易出现频繁加减速,系统功率波动且电机能量回收频繁,氢燃料发动机可以以中等功率值运行,进而可以控制电池的剩余电量的下降速率,且避免电池的剩余电量过高,以保证供需平衡,电池的剩余电量保持在高效区间内,而且电机的能量回收性能更高。
而当电池的剩余电量小于30%且不小于10%时,氢燃料发动机的功率可以以较大的第六预设功率运行,这样在驱动车辆行驶的同时,还可以利用氢燃料发动机为电池快速充电,以提高电池的电量,使电池的剩余电量可以稳定在高效区间内。
而当电池剩余电量低于10%时,此时电池的剩余电量较小,氢燃料发动机可以使用最大功率运行,以为电池快速供电,这样车辆为电池的充电速率更快,进而可以快速地将电池的电量提高至高效区间内,以提高车辆的驱动性能。
根据本发明实施例的车辆的控制方法的其他构成以及操作对于本域普通技术人员而言都是已知的,这里不再详细描述。
在本说明书的描述中,参考术语“具体实施例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
- 车辆控制系统、车辆外置式电子控制单元、车辆控制方法及记录介质
- 车辆控制装置、车辆、车辆控制装置的处理方法以及存储介质
- 车辆上安装的车辆控制设备和用于控制车辆的方法
- 车辆控制装置、车辆、车辆控制方法以及存储介质
- 车辆控制装置、车辆、车辆控制装置的处理方法以及存储介质
- 车辆用控制装置、车辆用控制系统、车辆用控制方法及车辆用控制系统的控制方法
- 车辆、车辆平台、车辆控制接口箱、自动驾驶套件、车辆的控制方法及车辆平台的控制方法