一种清洁机器人和回位弹性结构
文献发布时间:2024-01-17 01:23:17
技术领域
本发明涉及清洁技术领域,尤其涉及了一种清洁机器人和回位弹性结构。
背景技术
清洁机器人,又称扫地机器人,是智能家居家电的重要组成部分,能自动完成房间内地面的清理打扫工作,但是房间内的阴角,往往是清洁机器人打扫的死角位置,长时间后在该位置容易堆积灰尘、垃圾等。
中国专利(公告号CN111195107A)提供一种用于清洁机器人的边刷伸缩系统及其工作方法,边刷伸缩系统包括:摆动机构、弹性元件、摆动臂和边刷;所述摆动臂的第一端与所述摆动机构转动连接,第二端设有所述边刷;所述弹性元件的第一端与所述摆动机构相连,第二端与所述摆动臂相连;通过所述摆动机构和弹性元件使所述边刷在露出状态与不露出状态之间切换。摆动臂上设置有边刷驱动电机的容纳腔,并套设在限位机构中。所述摆动臂设置为中空结构,并在内部设置有齿轮组,边刷驱动电机通过齿轮组实现边刷的驱动,其好处是将边刷的驱动组件设置在摆动臂的转动轴上,从而避免了大尺寸的边刷的驱动组件需要随边刷一起摆动。上述发明能够在不增加边刷尺寸及不增加清洁机器人尺寸的情况下,实现圆弧形边缘的清洁机器人墙角的清洁。
在该技术方案中,边刷部件自身的清扫区域或移动区域主要为一个圆形区域,即使借助摆动臂,边刷部件的清扫区域或移动区域依旧是一个类似圆形的区域。而一般家居环境中的墙角多为直角,在清扫之后还是会留下较大一块未清扫到边角,从而形成留下卫生死角,无法实现最大程度地房间角落位置的打扫。
进一步,上述方案中,如果需要边刷部件走直线路径或曲线路径,需要清洁机器人主体配合,即通过清洁机器人主体移动,带动边刷部件移动。因而为了提升墙角的清扫效果,边刷部件必须要借助清洁机器人主体的带动,并需要进行反复移动,才有可能实现墙角的有效清扫,进而边刷部件无法对墙角进行自适应,导致此控制过程比较复杂,清扫效果差,并且需要消耗较多电量,影响清洁机器人的续航,不利于推广使用。
更进一步,上述方案的边刷驱动电机以及相应的驱动组件都装配在摆动臂上,并需要随摆动臂一起往复摆动,从而使得摆动臂与机器人本体之间需要布设复杂的供电线路以及信号线路;并且由于摆动臂相对机器人本体转动,需要考虑走线的安全以及美观问题,导致布线难度进一步加大,影响清洁机器人的制造成本以及使用寿命。
本背景技术中公开的信息仅用于理解本发明构思的背景,因此它可以包括不构成现有技术的信息。
发明内容
针对上述问题或上述问题之一,本发明的目的一在于提供一种清洁机器人,通过在清洁机器人上设置可自动伸缩退让的刷头,当所述刷头碰到墙角时,刷头可以进行位姿变换,使得刷头能与墙角更为贴合,从而能通过刷头的旋转,能实现对房间内的阴角等卫生死角位置的有效清洁,结构简单、实用,切实可行。
针对上述问题或上述问题之一,本发明的目的二在于提供一种回位弹性结构,设置能带动连接件旋转,并能相对连接件移动的第一连接部;并通过弹性件驱动移动后的连接件回位,从而使得连接件在遇到外界的阻碍后,并能借助外界碰撞力,使连接件相对第一连接部移动,以达到碰撞退让目的,从而使得连接件的移动区域不光可以是圆形区域,也可以是直线区域,或曲线运动,或陀螺式移动。
针对上述问题或上述问题之一,本发明的目的三在于提供一种回位弹性结构,不需要复杂的编程控制,控制过程比较简单;并通过连接件的自身碰撞调整,能够使得连接件的边缘与外界碰撞物更加贴合,进行自适应改变,从而能够有效提升清扫效果;同时连接件与旋转轴的相对移动,不需要消耗电量,能够有效节省能源,增加电动主体的续航,利于推广使用。
针对上述问题或上述问题之一,本发明的目的四在于提供一种清洁机器人,设置能带动刷头旋转,并能相对刷头滑动的第一连接部;并通过弹性件驱动移动后的刷头回位,从而使得刷头在遇到墙角的阻碍后,能借助墙角碰撞力,使刷头相对第一连接部平移,以达到碰撞退让目的,从而使得刷头自身的移动区域不光可以是圆形区域,也可以是直线区域,或曲线运动,或陀螺式移动。
为实现上述目的之一,本发明的第一种技术方案为:
一种清洁机器人,包括机身、弹性活动组件、清洁转盘,所述弹性活动组件包括活动组件、弹性件、第一连接部和第二连接部,所述第一连接部和第二连接部通过活动组件相互移动,并通过弹性件复位;所述清洁转盘包括刷头;
所述弹性活动组件设于所述清洁转盘内,所述第一连接部通过所述第二连接部驱动所述刷头旋转,并能相对所述刷头产生位移,当所述刷头受到外力干涉时,所述刷头能退让,所述第一连接部偏离所述刷头的几何中心;
或者,所述弹性活动组件设于所述机身内,所述第一连接部与所述刷头直接固定连接,所述第二连接部通过所述第一连接部驱动所述刷头旋转;当所述刷头受到外力干涉时,所述刷头能退让,并能相对所述第二连接部产生位移。
本发明提供的一种清洁机器人,通过在清洁机器人上设置可自动伸缩退让的刷头,当所述刷头碰到墙角时,刷头可以进行位姿变换,使得刷头能与墙角更为贴合,从而能通过刷头的旋转,能实现对房间内的阴角等卫生死角位置的有效清洁,结构简单、实用,切实可行。
作为优选技术措施:
所述弹性件包括发条弹簧,所述发条弹簧与所述第二连接部内壁抵接;
所述活动组件包括相互交叉设于所述第二连接部上的导轨一和导轨二,所述导轨一和所述导轨二的交叉点处设有能分别在所述导轨一和所述导轨二上滑动的底座,所述第一连接部固定于所述底座上,使得第二连接部能相对第一连接部移动,并能传递扭矩。
作为优选技术措施:
所述弹性件或/和所述活动组件为以所述第一连接部为中心均匀辐射分布的弹性辐条,以使所述第一连接部保持在安装位置的几何中心处。
作为优选技术措施:
所述刷头为圆弧三角状结构或四边形结构,所述机身上对称设有两组所述刷头,所述刷头底面设有接触清洁工作面的柔性清洁件;
优选地,刷头为圆弧三角状结构,其形状为圆弧三角形,能与墙角更为贴合,通过圆弧三角状的特殊几何性质,实现对房间角落位置的打扫,结构简单、合理。
或/和,所述第一连接部为T型结构,其与电机转子或清洁转盘固接;
第二连接部为开设有容纳槽的圆柱结构,所述容纳槽能够容纳活动组件、弹性件、第一连接部,形成一体式模块化装配结构,便于拆装,更换维护;
当第一连接部与电机转子固接时,第二连接部与清洁装配固接;
当第一连接部与清洁装配固接时,第二连接部与电机转子固接。
作为优选技术措施:所述清洁转盘设有升降结构,使其能相对所述机身进行抬升。当地面有地毯等不需要清洁的物体时,可以抬升清洁转盘,以避开不需要清洁物体,避免对物体造成不必要损坏。
为实现上述目的之一,本发明的第二种技术方案为:
一种回位弹性结构,包括能够承受外界碰撞力的连接件、外力作用下能够形变的弹性件;
所述连接件上设有能带动连接件旋转,并能相对连接件移动的第一连接部;
所述弹性件与连接件相连接,并能驱动移动后的连接件回位。
本发明经过不断探索以及试验,设置能带动连接件旋转,并能相对连接件移动的第一连接部;并通过弹性件驱动移动后的连接件回位,从而使得连接件在遇到外界的阻碍后,并能借助外界碰撞力,使连接件相对第一连接部移动,以达到碰撞退让目的,从而使得连接件的移动区域不光可以是圆形区域,也可以是直线区域,或曲线运动,或陀螺式移动。
进一步,本发明的连接件不需要其他电动主体的配合,即可在外界碰撞力和弹性件的作用,实现其直线运动或曲线运动,不需要复杂的编程控制,控制过程比较简单;并通过连接件的自身碰撞调整,能够使得连接件的边缘与外界碰撞物更加贴合,进行自适应改变,从而能够有效提升清扫效果。同时连接件与旋转轴的相对移动,不需要消耗电量,能够有效节省能源,增加电动主体的续航,利于推广使用。在一些场景中,连接件也可以在其他电动主体的配合下,走直线或曲线运动,扩大连接件以及回位弹性结构的移动范围。
更进一步,本发明的连接件与旋转轴的相对移动,不需要消耗电量,可以不设置相应的供电电路;其直线运动或曲线运动,可以自适应完成,在一般场景下,也可以不设置信号线路,结构简单、实用,并且美观,制造成本低,使用寿命长。
所述电动主体可以是清洁机器人。
作为优选技术措施:
所述连接件为装配毛刷的刷头或机身;
或/和,所述弹性件为发条弹簧或压缩弹簧或弹性辐条或弹性橡胶或伸缩杆;
或/和,所述第一连接部为电机转子或减速器输出端或固接电机转子的延伸杆,其为圆柱结构或框架结构或者方形结构或三角形结构。
作为优选技术措施:
所述连接件通过一活动组件与第一连接部相连接;
所述活动组件至少包括相互交叉设置的导轨一和导轨二,所述导轨一和所述导轨二的交叉点处设有能分别在所述导轨一和所述导轨二上滑动的底座;或,所述活动组件包括滑块和滑轨;所述滑块固接在第一连接部上;
或,所述连接件通过一能够摆动的连接头与第一连接部相连接;连接头一端装配在连接件上,另一端与第一连接部相连接,以实现连接件相对第一连接部移动。所述连接头可以包括一个或多个单向摆动接头,第一连接部直接与摆动接头相连接,从而可以实现连接件在受到外界的碰撞力后,能竖向或/和横向摆动。
作为优选技术措施:
所述弹性件为环状设置的回中弹性结构,其装配在第二连接部上;
第二连接部为柱状结构或三角形结构或方形结构或圆弧结构,其开设容纳槽,所述容纳槽能够容纳活动组件、弹性件、第一连接部,形成一体式模块化装配结构;
所述第一连接部为杆状结构,其位于回中弹性结构的中心,使得第一连接部受力更加均匀;
所述连接件为三角状结构或四边形结构,其开设用于容纳第二连接部的容纳腔,便于对第二连接部以及第一连接部和弹性件进行有效限位,使其结构更加安全可靠;
所述回中弹性结构与所述第一连接部抵接,且使所述第一连接部保持在所述容纳腔的几何中心处;
当所述连接件受到外力干涉时,所述连接件带动第二连接部移动,第二连接部相对第一连接部移动,使得第一连接部偏离所述连接件的几何中心,以达到碰撞退让目的;
移动的连接件,带动第二连接部以及回中弹性结构发生形变,产生弹性复位力;
当外力干涉消失后,弹性复位力带动连接件回位。
本发明的连接件不需要其他电动主体的配合,即可在外界碰撞力和弹性件的作用,实现其直线运动或曲线运动,不需要复杂的编程控制,控制过程比较简单;并通过连接件的碰撞调整,能够使得连接件的边缘与外界碰撞物更加贴合,自适应效果好,连接件与旋转轴的相对移动,不需要消耗电量,能够有效节省能源,增加电动主体的续航,利于推广使用。
更进一步,本发明的连接件与旋转轴的相对移动,不需要消耗电量,可以不设置供电电路,其直线运动或曲线运动,可以自适应完成,也可以不设置信号线路,结构简单、实用,并且美观,制造成本低,使用寿命高。
更进一步,所述连接件为三角状结构,其与墙角的形状更为适配,从而能提升连接件与墙角的贴合度,进一步提升连接件的自适应能力。
为实现上述目的之一,本发明的第三种技术方案为:
一种清洁机器人,包括具有空腔的机身、具有边角的刷头、能够带动刷头移动的弹性件;
机身内腔装配旋转电机,其通过旋转电机的第一连接部带动刷头旋转;
所述第一连接部与刷头滑动连接,使得刷头与第一连接部之间能产生横向的位移;
所述刷头装配在机身的下端部,并横向凸出于机身;
所述弹性件与刷头相连接,并能驱动滑动后的刷头回位;
当刷头与外界相碰撞时,碰撞力驱动刷头相对第一连接部滑动,以达到碰撞退让目的;移动的刷头,带动弹性件发生形变,产生弹性复位力;
当碰撞力消失后,弹性复位力带动刷头回位。
本发明经过不断探索以及试验,设置能带动刷头旋转,并能相对刷头滑动的第一连接部;并通过弹性件驱动移动后的刷头回位,从而使得刷头在遇到墙角的阻碍后,能借助墙角碰撞力,使刷头相对第一连接部平移,并改变刷头的位姿,以达到碰撞退让目的,从而使得刷头自身的移动区域不光可以是圆形区域,也可以是直线区域,或曲线运动,或陀螺式移动。
进一步,本发明的刷头不需要清洁机器人主体的配合,即可在墙角碰撞力和弹性件的作用,实现其直线运动或曲线运动,不需要复杂的编程控制,控制过程比较简单;并通过刷头的碰撞调整,能够使得刷头的边角与墙角更加贴合,自适应效果好;进而刷头与旋转轴的相对移动,不需要消耗电量,能够有效节省能源,增加清洁机器人的续航,利于推广使用。
更进一步,本发明的刷头与旋转轴的相对移动,不需要消耗电量,因而可以不设置供电电路;其在墙角处的直线运动或曲线运动,可以自适应完成,因而可以不设置信号线路,结构简单、实用,并且美观,制造成本低,使用寿命高。
作为优选技术措施:
所述第一连接部与刷头之间装配活动组件;
所述活动组件至少包括一个滑轨和滑块;所述滑块固接在第一连接部上;
或/和,刷头为三角状结构,其棱角为圆弧,便于适配直角墙角,使得刷头能够与墙角更贴合,从而能够对墙角进行有效清扫,进一步增强墙角的清扫效果;棱角为圆弧一方面能增加结构美观,另一方面能减少对墙面的损坏。
或/和,刷头为壳状结构,其设有用于容纳弹性件以及第一连接部的容纳腔;
或/和,刷头为片状结构,其设有用于装配弹性件的钩状体或凹槽;
或/和,刷头的外表面装配软质的防撞体,以避免碰伤墙面。
所述防撞体为间隔分布的块状材料或条状材料或能包覆刷头外边缘的片状材料。
相比现有技术,本发明的有益效果在于:
本发明提供的一种清洁机器人,通过在清洁机器人上设置可自动伸缩退让的刷头,当所述刷头碰到墙角时,刷头可以进行位姿变换,使得刷头能与墙角更为贴合,从而能通过刷头的旋转,能实现对房间内的阴角等卫生死角位置的有效清洁,结构简单、实用,切实可行。
本发明经过不断探索以及试验,设置能带动连接件旋转,并能相对连接件移动的第一连接部;并通过弹性件驱动移动后的连接件回位,从而使得连接件在遇到外界的阻碍后,并能借助外界碰撞力,使连接件相对第一连接部移动,以达到碰撞退让目的,从而使得连接件的移动区域不光可以是圆形区域,也可以是直线区域,或曲线运动,或陀螺式移动。
进一步,本发明经过不断探索以及试验,设置能带动刷头旋转,并能相对刷头滑动的第一连接部;并通过弹性件驱动移动后的刷头回位,从而使得刷头在遇到墙角的阻碍后,能借助墙角碰撞力,使刷头相对第一连接部平移,以达到碰撞退让目的,从而使得刷头自身的移动区域不光可以是圆形区域,也可以是直线区域,或曲线运动,或陀螺式移动。
再进一步,本发明的连接件不需要其他电动主体的配合,即可在外界碰撞力和弹性件的作用,实现其直线运动或曲线运动,不需要复杂的编程控制,控制过程比较简单;并通过连接件的自身碰撞调整,能够使得连接件的边缘与外界碰撞物更加贴合,进行自适应改变,从而能够有效提升清扫效果。同时连接件与旋转轴的相对移动,不需要消耗电量,能够有效节省能源,增加电动主体的续航,利于推广使用。在一些场景中,连接件也可以在其他电动主体的配合下,走直线或曲线运动,扩大连接件以及回位弹性结构的移动范围。
更进一步,本发明的连接件与旋转轴的相对移动,不需要消耗电量,可以不设置相应的供电电路;其直线运动或曲线运动,可以自适应完成,在一般场景下,也可以不设置信号线路,结构简单、实用,并且美观,制造成本低,使用寿命长。
下面结合附图和具体实施方式对本发明作进一步详细说明。
附图说明
图1是本发明清洁组件一实施例的爆炸示意图;
图2是本发明清洁组件一实施例的整体示意图;
图3是本发明清洁组件一实施例的全剖示意图;
图4是本发明清洁机器人的一种工作状态示意图;
图5是本发明清洁组件的另一实施例的整体示意图。
图6是本发明清洁机器人的一种底面示意图;
图7是本发明清洁机器人清洁墙角时的一种示意图;
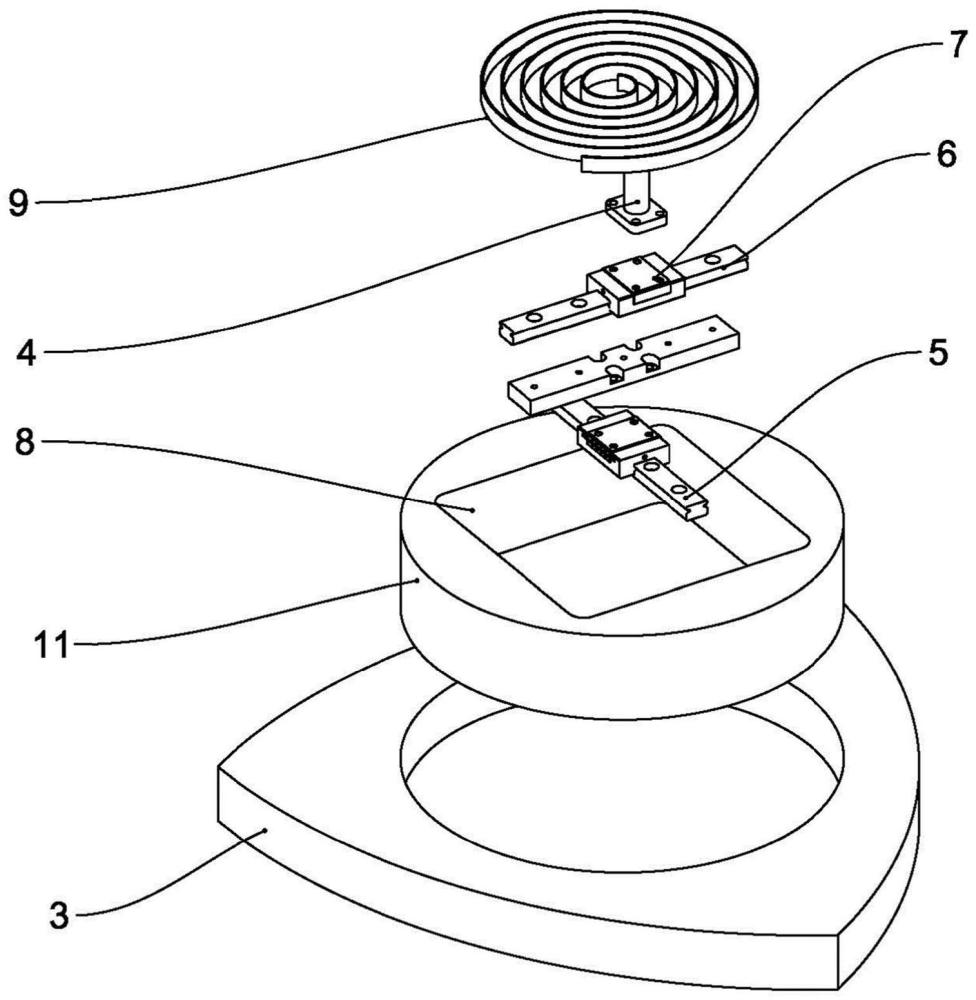
图8是本发明清洁机器人一实施例的爆炸示意图。
图中:1、机身;3、刷头;4、第一连接部;5、导轨一;6、导轨二;7、底座;8、容纳槽;9、发条弹簧;10、弹性辐条;11、第二连接部。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
相反,本发明涵盖任何由权利要求定义的在本发明的精髓和范围上做的替代、修改、等效方法以及方案。进一步,为了使公众对本发明有更好的了解,在下文对本发明的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本发明。
需要说明的是,当两个元件“固接”或“滑动连接”时,两个元件可以直接连接或者也可以存在居中的元件。相反,当元件被称作“直接在”另一元件“上”时,不存在中间元件。本文所使用的术语“横向”、“竖向”、“上”、“下”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文所使用的术语只是为了描述具体的实施例的目的,不是旨在限制本发明。本文所使用的术语“或/和”包括一个或多个相关的所列项目的任意的和所有的组合。
如图1、图2、图3、图4、图5、图6、图7所示,本发明清洁机器人的第一种具体实施例:
一种清洁机器人,包括机身1、弹性活动组件、清洁转盘,所述弹性活动组件包括活动组件、弹性件、第一连接部4和第二连接部11,所述第一连接部4和第二连接部11通过活动组件相互移动,并通过弹性件复位;所述清洁转盘包括刷头3。
所述弹性活动组件设于所述清洁转盘内,所述第一连接部4通过所述第二连接部11驱动所述刷头3旋转,并能相对所述刷头3产生位移,当所述刷头3受到外力干涉时,所述刷头3能退让,所述第一连接部4偏离所述刷头3的几何中心。
如图8所示,本发明清洁机器人的第二种具体实施例:
一种清洁机器人,包括机身1、弹性活动组件、清洁转盘,所述弹性活动组件包括活动组件、弹性件、第一连接部4和第二连接部11,所述第一连接部4和第二连接部11通过活动组件相互移动,并通过弹性件复位;所述清洁转盘包括刷头3。
所述弹性活动组件设于所述机身1内,所述第一连接部4与所述刷头3直接固定连接,所述第二连接部11通过所述第一连接部4驱动所述刷头3旋转;当所述刷头3受到外力干涉时,所述刷头3能退让,并能相对所述第二连接部11产生位移。
本发明提供的一种清洁机器人,通过在清洁机器人上设置可自动伸缩退让的刷头3,当所述刷头3碰到墙角时,刷头3可以进行位姿变换,使得刷头3能与墙角更为贴合,从而能通过刷头3的旋转,能实现对房间内的阴角等卫生死角位置的有效清洁,结构简单、实用,切实可行。
本发明清洁机器人的第三种具体实施例:
一种清洁机器人,包括具有空腔的机身1、具有边角的刷头3、能够带动刷头3移动的弹性件;
机身1内腔装配旋转电机,其通过旋转电机的第一连接部4带动刷头3旋转;
所述第一连接部4与刷头3滑动连接,使得刷头3与第一连接部4之间能产生横向的位移;
所述刷头3装配在机身1的下端部,并横向凸出于机身1;
所述弹性件与刷头3相连接,并能驱动滑动后的刷头3回位;
当刷头3与外界相碰撞时,碰撞力驱动刷头3相对第一连接部4滑动,以达到碰撞退让目的;移动的刷头3,带动弹性件发生形变,产生弹性复位力;
当碰撞力消失后,弹性复位力带动刷头3回位。
本发明弹性件的第一种具体实施例:
所述弹性件包括发条弹簧9,所述发条弹簧9与所述第二连接部11内壁抵接。
本发明弹性件的第二种具体实施例:
所述弹性件或/和所述活动组件为以所述第一连接部4为中心均匀辐射分布的弹性辐条10,以使所述第一连接部4保持在安装位置的几何中心处。
本发明活动组件的一种具体实施例:
所述活动组件包括相互交叉设于所述第二连接部11上的导轨一5和导轨二6,所述导轨一5和所述导轨二6的交叉点处设有能分别在所述导轨一5和所述导轨二6上滑动的底座7,所述第一连接部4固定于所述底座7上,使得第二连接部11能相对第一连接部4移动,并能传递扭矩。
本发明刷头3的一种具体实施例:
所述刷头3为圆弧三角状结构,所述机身1上对称设有两组所述刷头3,所述刷头3底面设有接触清洁工作面的柔性清洁件;通过圆弧三角状的特殊几何性质,实现对房间角落位置的打扫,结构简单、合理。
本发明连接部结构的一种具体实施例:
所述第一连接部4为T型结构;
第二连接部11为开设有容纳槽8的圆柱结构,所述容纳槽8能够容纳活动组件、弹性件、第一连接部4,形成一体式模块化装配结构,便于拆装,更换维护;
当第一连接部4与电机转子固接时,第二连接部11与清洁装配固接;
当第一连接部4与清洁装配固接时,第二连接部11与电机转子固接。
本发明回位弹性结构的第一种具体实施例:
一种回位弹性结构,包括能够承受外界碰撞力的连接件、外力作用下能够形变的弹性件;
所述连接件上设有能带动连接件旋转,并能相对连接件移动的第一连接部4;
所述弹性件与连接件相连接,并能驱动移动后的连接件回位。
所述连接件为壳体结构或平板结构或框架结构或清洁毛刷或装配毛刷的刷头3或机身1。
本发明回位弹性结构的第二种具体实施例:
一种回位弹性结构,包括能够承受外界碰撞力的连接件、外力作用下能够形变的弹性件;所述弹性件为环状设置的回中弹性结构,其装配在第二连接部11上;
第二连接部11为柱状结构或三角形结构或方形结构或圆弧结构,其开设容纳槽8,所述容纳槽8能够容纳活动组件、弹性件、第一连接部4,形成一体式模块化装配结构;
所述第一连接部4为杆状结构,其位于回中弹性结构的中心,使得第一连接部4受力更加均匀;
所述连接件为三角状结构或四边形结构,其开设用于容纳第二连接部11的容纳腔,便于对第二连接部11以及第一连接部4和弹性件进行有效限位,使其结构更加安全可靠;
所述回中弹性结构与所述第一连接部4抵接,且使所述第一连接部4保持在所述容纳腔的几何中心处;
当所述连接件受到外力干涉时,所述连接件带动第二连接部11移动,第二连接部11相对第一连接部4移动,使得第一连接部4偏离所述连接件的几何中心,以达到碰撞退让目的;
移动的连接件,带动第二连接部11以及回中弹性结构发生形变,产生弹性复位力;
当外力干涉消失后,弹性复位力带动连接件回位。
本发明的一种工作原理实施例:
机身11内腔装配旋转电机,其通过旋转电机的第一连接部44带动刷头33旋转;所述第一连接部44与刷头3滑动连接,使得刷头3与第一连接部44之间能产生横向的位移;所述刷头3为能够清扫墙角的圆弧三角状结构,其装配在机身11的下端部,并横向凸出于机身11;所述弹性件与刷头33相连接,并能驱动滑动后的刷头33回位。
当刷头33与外界相碰撞时,碰撞力驱动刷头33相对第一连接部44滑动,以达到碰撞退让目的;移动的刷头33,带动弹性件发生形变,产生弹性复位力;
当碰撞力消失后,弹性复位力带动刷头33回位。刷头33为圆弧三角状结构,其与墙角的形状更为适配,从而能提升连接件与墙角的贴合度,进一步提升刷头33的自适应能力。
本申请中,固接方式可以为螺接或焊接或铆接或插接或通过第三个部件进行连接,本领域技术人员可根据实际情况进行选择。
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
- 一种家具滑动门的拨动装置弹性自寻位结构
- 一种具有弹性结构的防摔机器人
- 箱体自动翻盖结构、水箱、清洁机器人和补水站
- 箱体自动翻盖结构、水箱、清洁机器人和补水站