一种带电作业机器人双臂协同工作方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及带电作业机器人技术领域,具体为一种带电作业机器人双臂协同工作方法。
背景技术
电网作业机器人方面,由于作业任务的种类繁多,作业系统需求的灵活性与多变性,研发难度较高,该类机器人与巡检类机器人相比,发展较慢,现阶段主要用于解决简单的电网作业任务。经过近些年的发展,日本、加拿大、中国等国家在电网机器人方面都取得了不错的研究成果与应用进展。但是现有的带电作业以人工作业为主,即使有用机器人来作业的,一般采用单臂作业或者视频监控遥操作的方案。
但是在进行一些带电剥线、带电拆接引线等作业场景,往往需要用到双臂作业,但是在对双臂机器人控制时,现有的带电作业机器人难以形成以灵巧双臂作业端,无法让两个机械臂同时进行精细化远程操控作业,缺少有效的控制反馈,为此,我们提出了一种带电作业机器人双臂协同工作方法。
发明内容
针对现有技术的不足,本发明提供了一种带电作业机器人双臂协同工作方法,解决了上述背景技术中的问题。
为实现上述目的,本发明提供如下技术方案:一种带电作业机器人双臂协同工作方法,包括以下步骤:
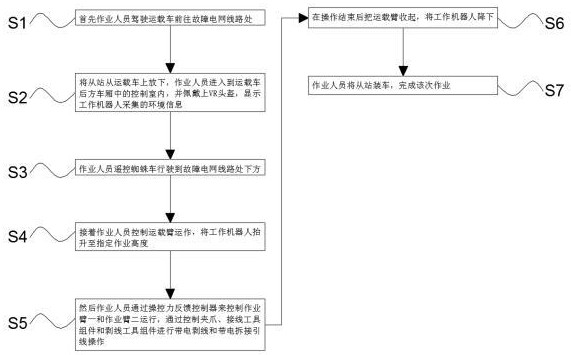
S1、首先作业人员驾驶运载车前往故障电网线路处;
S2、将从站从运载车上放下,作业人员进入到运载车后方车厢中的控制室内,并佩戴上VR头盔,显示工作机器人采集的环境信息;
S3、作业人员遥控蜘蛛车行驶到故障电网线路处下方;
S4、接着作业人员控制运载臂运作,将工作机器人抬升至指定作业高度;
S5、然后作业人员通过操作控制器来遥控作业臂一和作业臂二运行,通过控制夹爪、接线工具组件和剥线工具组件进行带电剥线和带电拆接引线操作;
S6、在操作结束后把运载臂收起,将工作机器人降下;
S7、作业人员将从站装车,完成该次作业。
优选的,所述步骤S2中,运载车后方车厢中装载有混合现实交互设备,所述混合现实交互设备包括头显设备和操控者位姿追踪设备,主要用于显示机器人采集的环境信息,集成交互界面等功能。
优选的,所述步骤S2中,工作机器人通过其上安装的全景相机和和双目相机来采集环境信息。
优选的,所述步骤S5中,遥控操作控制器包括指令采集装置和力反馈装置等,用于采集操控指令和反馈机器人端力觉信息。
优选的,所述步骤S5中,在进行带电剥线和带电拆接引线操作时,要求保证工作机器人的作业区域与控制室区域的绝缘隔离,保证操控者人身安全。
优选的,所述方法中力反馈装置是基于力反馈技术和视频监控反馈信息对作业臂进行遥控操作,为了提高系统性能,在控制上采用主-从控制为主、局部自主为辅的控制方式。
优选的,一种带电作业机器人双臂协同工作方法,包括从站和主站,所述从站用于放置和运载带电作业机器人主体,所述主站用于装载混合现实交互设备和力反馈遥操作控制设备,所述从站包括蜘蛛车,所述蜘蛛车用于运载带电作业机器人主体,所述蜘蛛车外壁上端固定安装有运载臂,所述运载臂用于将带电作业机器人主体托举至作业高度,所述运载臂外壁上端固定安装有工作机器人,所述工作机器人用于进行带电剥线和带电拆接引线操作,所述工作机器人前胸处固定安装有激光雷达,所述激光雷达用于探测目标位置和距离,所述工作机器人右肩处固定安装有作业臂一,所述工作机器人左肩处固定安装有作业臂二,所述作业臂一外壁上端固定安装有夹爪,所述夹爪用于夹住线缆,所述作业臂二外壁上端固定安装有接线工具组件,所述接线工具组件用于将不同的线缆进行连接,所述工作机器人头部固定安装有全景相机和双目相机,所述全景相机和双目相机作业环境的图像信息反馈给操作者,所述工作机器人外壁前端下侧固定安装有剥线工具组件,所述剥线工具组件用于将需要连接的线缆的绝缘外皮进行剥除,所述主站包括运载车,所述运载车车厢中坐有作业人员,所述作业人员佩戴有VR头盔,所述VR头盔用于向所述作业人员显示所述工作机器人采集的环境信息,所述运载车车厢中固定安装有升降式显示器支架,所述升降式显示器支架外壁上端固定安装有显示器,所述显示器用于显示各种信息参数,所述升降式显示器支架外壁前端固定安装有托板,所述托板外壁上端固定安装有力反馈控制器,所述力反馈控制器用于将所述工作机器人上的各个操作部件的作用力实时反馈给操作者。
优选的,所述接线工具组件、所述夹爪和所述剥线工具组件与线缆直接接触处均采取绝缘处理。
本发明提供了一种带电作业机器人双臂协同工作方法,具备以下有益效果:
、本发明在使用时,首先通过通过混合现实技术构建具备深度视觉感知的可视化环境,将工作机器人端真实作业场景和作业员端虚拟作业场景进行“无缝”融合,同时通过力反馈技术,机械臂运动学主动避障技术等进行精细化远程操控作业,让作业人员在安全环境下开展“身临其境”的带电做业,从而解决目前带电作业机器人自动化作业建模时间长,作业类型局限的缺点。
、本发明在使用时,通过主站用于装载混合现实交互设备和力反馈遥操作控制设备,从站用于放置和运载带电作业机器人主体,从站将机器人运载到作业地点下方,并将机器人本体托举到作业位置,保证作业区域与控制室区域的绝缘隔离,保证操控者人身安全。
附图说明
图1为本发明的流程示意图;
图2为本发明的从站结构示意图;
图3为本发明的主站结构示意图;
图4为本发明的主-从操作控制系统框图。
图中:1、蜘蛛车;2、工作机器人;3、激光雷达;4、作业臂一;5、夹爪;6、全景相机;7、接线工具组件;8、双目相机;9、剥线工具组件;10、作业臂二;11、运载车;12、作业人员;13、VR头盔;14、显示器;15、显示器支架;16、托板;17、力反馈控制器;18、运载臂;100、从站;200、主站。
实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例
如附图1-图4所示的一种带电作业机器人双臂协同工作方法,包括以下步骤:
S1、首先作业人员驾驶运载车前往故障电网线路处;
S2、将从站从运载车上放下,作业人员进入到运载车后方车厢中的控制室内,并佩戴上VR头盔,显示工作机器人采集的环境信息;
S3、作业人员遥控蜘蛛车行驶到故障电网线路处下方;
S4、接着作业人员控制运载臂运作,将工作机器人抬升至指定作业高度;
S5、然后作业人员通过操作控制器来遥控作业臂一和作业臂二运行,通过控制夹爪、接线工具组件和剥线工具组件进行带电剥线和带电拆接引线操作;
S6、在操作结束后把运载臂收起,将工作机器人降下;
S7、作业人员将从站装车,完成该次作业。
一种带电作业机器人双臂协同工作方法,包括从站100和主站200,从站100用于放置和运载带电作业机器人主体,主站200用于装载混合现实交互设备和力反馈遥操作控制设备,从站100包括蜘蛛车1,蜘蛛车1用于运载带电作业机器人主体,蜘蛛车1外壁上端固定安装有运载臂18,运载臂18用于将带电作业机器人主体托举至作业高度,运载臂18外壁上端固定安装有工作机器人2,工作机器人2用于进行带电剥线和带电拆接引线操作,工作机器人2前胸处固定安装有激光雷达3,激光雷达3用于探测目标位置和距离,工作机器人2右肩处固定安装有作业臂一4,工作机器人2左肩处固定安装有作业臂二10,作业臂一4外壁上端固定安装有夹爪5,夹爪5用于夹住线缆,作业臂二10外壁上端固定安装有接线工具组件7,接线工具组件7用于将不同的线缆进行连接,工作机器人2头部固定安装有全景相机6和双目相机8,全景相机6和双目相机8作业环境的图像信息反馈给操作者,工作机器人2外壁前端下侧固定安装有剥线工具组件9,剥线工具组件9用于将需要连接的线缆的绝缘外皮进行剥除,主站200包括运载车11,运载车11车厢中坐有作业人员12,作业人员12佩戴有VR头盔13,VR头盔13用于向作业人员12显示工作机器人2采集的环境信息,运载车11车厢中固定安装有升降式显示器支架15,升降式显示器支架15外壁上端固定安装有显示器14,显示器14用于显示各种信息参数,升降式显示器支架15外壁前端固定安装有托板16,托板16外壁上端固定安装有力反馈控制器17,力反馈控制器17用于将工作机器人2上的各个操作部件的作用力实时反馈给操作者,接线工具组件7、夹爪5和剥线工具组件9与线缆直接接触处均采取绝缘处理。
其中:从站100用于放置和运载带电作业机器人主体,主站200用于装载混合现实交互设备和力反馈遥操作控制设备,蜘蛛车1用于运载带电作业机器人主体,工作机器人2用于进行带电剥线和带电拆接引线操作,激光雷达3用于探测目标位置和距离,夹爪5用于夹住线缆,接线工具组件7用于将不同的线缆进行连接,全景相机6和双目相机8作业环境的图像信息反馈给操作者,剥线工具组件9用于将需要连接的线缆的绝缘外皮进行剥除,VR头盔13用于向作业人员12显示工作机器人2采集的环境信息,显示器14用于显示各种信息参数,力反馈控制器17用于将工作机器人2上的各个操作部件的作用力实时反馈给操作者,接线工具组件7、夹爪5和剥线工具组件9与线缆直接接触处均采取绝缘处理,防止线缆中的高压电流直接与工作机器人2连通。
在基于实施例一的基础上,结合下面具体的工作方式对实施例一中的方案进行进一步细化介绍,详细见下文描述:
实施例
运载车后方车厢中装载有混合现实交互设备,混合现实交互设备包括头显设备和操控者位姿追踪设备,主要用于显示机器人采集的环境信息,集成交互界面等功能,工作机器人通过其上安装的全景相机和和双目相机来采集环境信息,步骤S5中,在进行带电剥线和带电拆接引线操作时,要求保证工作机器人的作业区域与控制室区域的绝缘隔离,保证操控者人身安全,方法中力反馈装置是基于力反馈技术和视频监控反馈信息对作业臂进行遥控操作,为了提高系统性能,在控制上采用主-从控制为主、局部自主为辅的控制方式。
其中:通过混合现实技术构建具备深度视觉感知的可视化环境,将工作机器人端真实作业场景和作业员端虚拟作业场景进行“无缝”融合,同时通过力反馈技术,机械臂运动学主动避障技术等进行精细化远程操控作业,让作业人员在安全环境下开展“身临其境”的带电做业,从而解决目前带电作业机器人自动化作业建模时间长,作业类型局限的缺点。
综上可得,本发明的工作流程:首先作业人员驾驶运载车前往故障电网线路处,将从站从运载车上放下,作业人员进入到运载车后方车厢中的控制室内,并佩戴上VR头盔,显示工作机器人采集的环境信息,工作机器人通过其上安装的全景相机和和双目相机来采集环境信息,运载车后方车厢中装载有混合现实交互设备,混合现实交互设备包括头显设备和操控者位姿追踪设备,主要用于显示机器人采集的环境信息,集成交互界面等功能,作业人员遥控蜘蛛车行驶到故障电网线路处下方,接着作业人员控制运载臂运作,将工作机器人抬升至指定作业高度,然后作业人员通过操作控制器来遥控作业臂一和作业臂二运行,通过控制夹爪、接线工具组件和剥线工具组件进行带电剥线和带电拆接引线操作,进行带电剥线和带电拆接引线操作时,要求保证工作机器人的作业区域与控制室区域的绝缘隔离,从而保证操控者人身安全,方法中力反馈装置是基于力反馈技术和视频监控反馈信息对作业臂进行遥控操作,为了提高系统性能,在控制上采用主-从控制为主、局部自主为辅的控制方式,通过混合现实技术构建具备深度视觉感知的可视化环境,将工作机器人端真实作业场景和作业员端虚拟作业场景进行“无缝”融合,同时通过力反馈技术,机械臂运动学主动避障技术等进行精细化远程操控作业,让作业人员在安全环境下开展“身临其境”的带电做业,从而解决目前带电作业机器人自动化作业建模时间长,作业类型局限的缺点,在操作结束后把运载臂收起,将工作机器人降下,作业人员将从站装车,完成该次作业。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种消防机器人的协同工作方法及系统
- 一种双臂协作机器人的双臂协调搬运方法
- 带电作业机器人的末端双臂协同脱困机构
- 一种用于高空带电作业的双臂机器人