一种可调节间距式智能种植机械
文献发布时间:2024-01-17 01:28:27
技术领域
本发明属于种植机械相关技术领域,具体涉及一种可调节间距式智能种植机械。
背景技术
我们根据农户种植不同农作物,需要不同种植间距的需求,设计了一款“可调节间距式智能种植机械”,机械共分为调节驱动模块、钻孔种植模块和种苗储藏运输模块。“可调节间距式智能种植机械”能根据农作物的生长空间需求,自动调整种植行、间距及种植深度;设计有育苗杯类种苗储存盘及运输机构,可种植大部分需要使用育苗杯进行移栽种植的种苗;整机配备远程控制模块,能较好地实现田地的远程自动化种植控制,大大减少了农民的种植强度。
在调节驱动模块中,能实现轮胎中心距的自由切换且不丧失四轮驱动能力,配以步进电机可精确到毫米级调整间距,高度匹配钻头中心距的调整;在钻孔种植模块中,能实现钻头可调节种植深度以及种植中心距的自由调节,同配以步进电机可精确到毫米级调节;在种苗运输模块中,能实现精确送苗、运苗、落苗。
现有的大多数种植机械轮距以及钻头主体的间距不能进行调节,在种植过程中可能会出现农作物的幼苗被碾压或投放不准确的情况,导致整体的质量不稳定的问题。
发明内容
本发明的目的在于提供一种可调节间距式智能种植机械,以解决上述背景技术中提出的现有的大多数种植机械轮距以及钻头主体的间距不能进行调节,在种植过程中可能会出现农作物的幼苗被碾压或投放不准确的情况,导致整体的质量不稳定的问题。
为实现上述目的,本发明提供如下技术方案:一种可调节间距式智能种植机械,包括车身主体;
所述车身主体的四角内侧位置处分别设置有调节驱动模块,所述车身主体的中间上侧位置处设置有钻孔模块,后侧所述调节驱动模块的上侧前后两端位置处分别设置有种苗运输模块。
优选的,所述调节驱动模块包括轮胎、驱动电机、传动轴、传动皮带轮、调节电机、调节皮带轮、移动杆、花键轴、连接器,所述调节电机主轴外侧固定连接有调节皮带轮,所述调节皮带轮的下侧位置处设置有移动杆,所述移动杆的左右两侧上方位置处分别设置有驱动电机,所述驱动电机的主轴外侧位置处连接有传动轴,所述传动轴的末端位置处设置有传动皮带轮,所述传动皮带轮的中间内侧位置处设置有花键轴,所述花键轴的右侧末端位置处设置有连接器,所述花键轴的一端末侧位置处设置有轮胎。
优选的,所述钻孔模块包括钻头主体、连接块、连接套筒、横杆、竖杆、电机、滑杆,所述横杆的上下两侧位置处分别设置有滑杆,所述钻头主体的上侧外部螺栓连接有连接套筒,所述连接套筒的外侧位置处设置有连接块,两个所述滑杆通过套接连接方式和连接块进行连接,所述横杆通过螺纹连接方式和连接块进行连接,所述横杆的中间位置处设置有竖杆,所述横杆和竖杆的连接位置处设置有连接螺纹块,所述横杆的一侧末端传动连接有电机。
优选的,所述种苗运输模块包括滑道、转动架、储存箱、分筛轮,所述储存箱的中间上侧位置处设置有转动架,所述储存箱的外侧位置处设置有滑道,所述滑道的下侧末端位置处设置有分筛轮。
优选的,所述驱动电机、调节电机以及电机分别通过连接外部电源进行供电,所述移动杆通过传动连接方式和调节皮带轮进行连接,所述连接器通过螺纹连接方式和移动杆进行连接,且所述连接器能通过螺纹在移动杆上进行移动,所述连接器通过滑动连接方式和车身主体进行连接,所述花键轴通过轴承连接方式和连接器进行连接。
优选的,所述电机能驱动横杆进行转动,所述钻头主体能通过连接块在横杆上利用螺纹进行移动,所述连接块能通过螺纹在竖杆上进行移动。
优选的,所述转动架和储存箱的内部连接位置处设置有转动电机,所述分筛轮的中间下侧位置处设置有步进电机,所述储存箱能通过转动电机进行转动。
与现有技术相比,本发明提供了一种可调节间距式智能种植机械,具备以下有益效果:
1、该调节驱动模块移动功能采用大轮胎,四电机直连驱动,运行平稳;利用轮胎两边的电机差速实现轮胎转向,转向灵活。同时前后安装传感器,当遇到障碍物,能实现智能避障;遇到田地边缘,能实现自动掉头,并进行下一行的种植动作,保证设备的独立操作的安全性、机动性,从而脱离人工监督种植。驱动电机和传动轴利用蜗轮蜗杆啮合,利用自锁能力,防止上下坡种植时溜坡现象。保证种植行、间距的准确性。
该钻孔模块中钻头主体开合无动力来源驱动,设计采用钻桶下扎同步顶压深度限位型材,从而使深度开合块通过连杆拉放实现钻头开合,通过调整深度限位型材高度,匹配下扎深度,可实现种植深度自由调整。且设计采用两个钻头同时进行工作,提升种植效率。
轮胎通过移动杆旋转,实现横向移动,适应不同田垄间种植所需轮胎中心距;通过轮胎启停间距及钻头下扎频率实现不同农作物种植所需间距调整。多方面贴合现实种植。在满足农作物生长空间需求的前提下,在有限的田地种植尽量多的农作物,实现经济效益最大化
2、种植行、间距可自由调整,钻桶通过横杆旋转,实现横向移动,从而自由调节种植行距,适应多种农作物所需不同行距种植。
3、种苗运输功能出苗即落苗,设计储存箱与运输滑道为一体,接分筛装置运苗,准确投放至指定区域。种苗储藏功能,设计采用盘状储藏方式,设备携带双盘使容量大幅度提升。整机适应多种需要通过育苗杯类方式进行移栽种植的种苗。
4、该种植机械是一种能全自动高效率且能自动调整种植行、间距及深度的种植机械。即以一般中小型种植农厂为对象,实现种植全程自动化,按照不同农作物的生长空间需求调整种植行、间距及种植深度,采用双钻头以提升种植效率,可种植大部分需要使用育苗杯进行移栽种植的种苗,机械本身携带两大盘苗,使单次种植持久化,从而使得农民种植更加便捷,通过设备智能化、自动化,在有限的土地种出跟多农作物,大大增加了种植效率,人工种植强度也得到了减少的同时加速了智能化进程。因此该项目的实施有很好的成果推广应用前景,广阔市场前景,同时具有很好的经济、社会效益。
附图说明
图1为本发明俯视角的结构示意图。
图2为本发明正面视角中的结构示意图。
图3为本发明中侧视角的结构示意图。
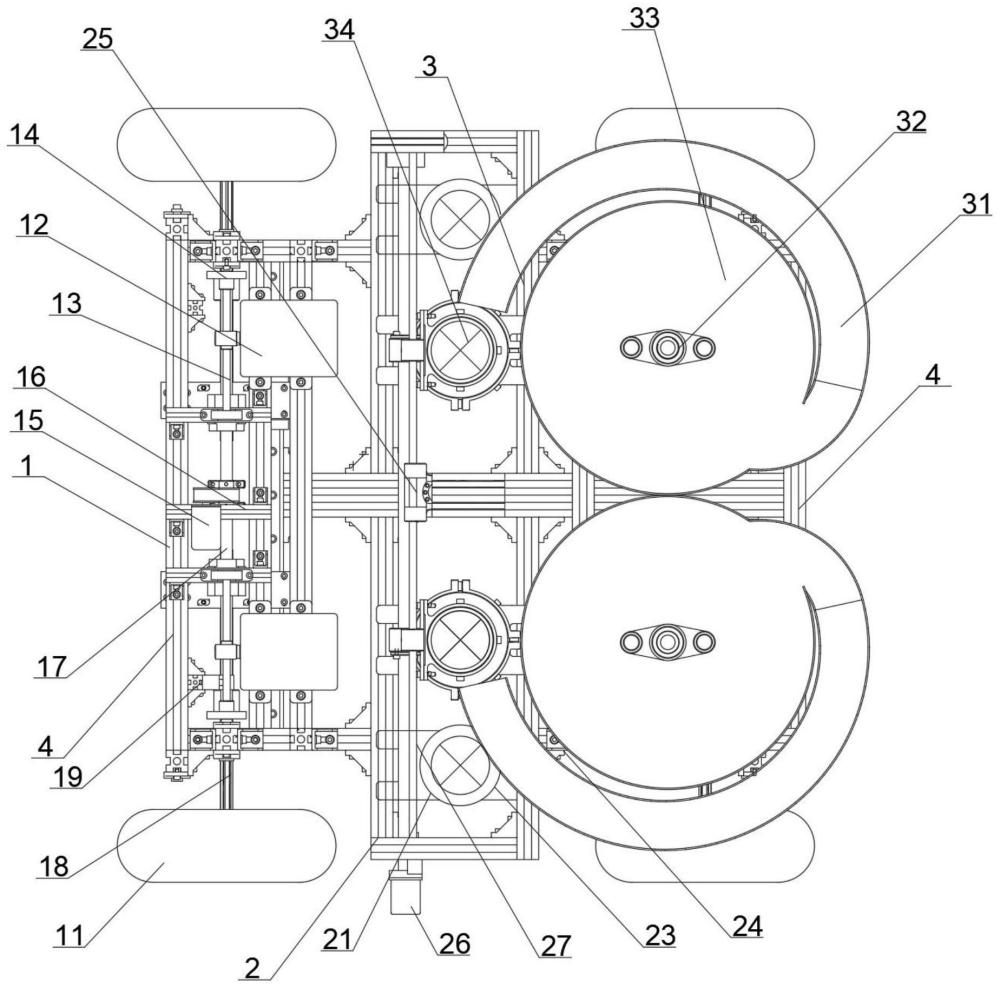
图中:1、调节驱动模块;11、轮胎;12、驱动电机;13、传动轴;14、传动皮带轮;15、调节电机;16、调节皮带轮;17、移动杆;18、花键轴;19、连接器;2、钻孔模块;21、钻头主体;22、连接块;23、连接套筒;24、横杆;25、竖杆;26、电机;27、滑杆;3、种苗运输模块;31、滑道;32、转动架;33、储存箱;34、分筛轮;4、车身主体。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明提供了如图1-3所示的一种可调节间距式智能种植机械,包括车身主体4;
车身主体4的四角内侧位置处分别设置有调节驱动模块1,车身主体4的中间上侧位置处设置有钻孔模块2,后侧调节驱动模块1的上侧前后两端位置处分别设置有种苗运输模块3。
本实施例中,该可调节间距式智能种植机械主要包括:种苗储藏运输模块3、调节驱动模块1、钻孔模块2,种苗储藏运输模块3中设计了育苗杯储存箱33,储存箱33与运输滑道31相连,准确投放育苗类种苗,可种植大部分需要使用育苗杯进行种植的作物,轮胎11及钻头主体21间距可调,满足农作物生长空间需求,两个钻头主体21同时工作,提高工作效率,四轮驱动以及差速转向,保证复杂地形也能保证自身较好的机动性。
作业人员能将种苗放置道种苗运输模块内的储存箱33上,利用储存箱33内部电机进行转动,从而利用离线力将种苗甩到滑道31内,通过滑道31将种苗运输到分筛轮34内,并通过分筛轮34将单个种苗利用波纹管输送进钻头主体21内;
而钻孔模块2内的钻头主体21能通过电机26驱动横杆24进行转动,从而调节钻头主体21在横杆24上进行移动,而横杆24以及两个滑杆27能通过螺纹在竖杆25上进行移动,利用该种移动方式,可以调节钻头主体21的间距,并能将钻头主体21插入进土壤内,完成种苗入土操作,完成种植;
作业人员能利用控制器控制驱动电机12利用传动皮带轮14带动花键轴18在连接器19内进行转动,而轮胎11能在花键轴18的驱动下,接触地面进行转动,从而带动车身主体4在被种植地进行移动,能控制调节电机15利用调节皮带轮16带动移动杆17进行转动,而连接器19通过螺纹连接方式进行连接,在移动杆17转动时,连接器19能通过螺纹在移动杆17上以及车身主体4上带动花键轴18以及轮胎11进行移动,达到调节轮胎11间距的作用,实现轮胎11伸缩功能。
可选的,传动皮带轮14下方和花键轴18进行活动连接,花键轴18能在传动皮带轮14内进行移动。
如图1-3所示,调节驱动模块1包括轮胎11、驱动电机12、传动轴13、传动皮带轮14、调节电机15、调节皮带轮16、移动杆17、花键轴18、连接器19,调节电机15主轴外侧固定连接有调节皮带轮16,调节皮带轮16的下侧位置处设置有移动杆17,移动杆17的左右两侧上方位置处分别设置有驱动电机12,驱动电机12的主轴外侧位置处连接有传动轴13,传动轴13的末端位置处设置有传动皮带轮14,传动皮带轮14的中间内侧位置处设置有花键轴18,花键轴18的右侧末端位置处设置有连接器19,花键轴18的一端末侧位置处设置有轮胎11,驱动电机12、调节电机15以及电机26分别通过连接外部电源进行供电,移动杆17通过传动连接方式和调节皮带轮16进行连接,连接器19通过螺纹连接方式和移动杆17进行连接,且连接器19能通过螺纹在移动杆17上进行移动,连接器19通过滑动连接方式和车身主体4进行连接,花键轴18通过轴承连接方式和连接器19进行连接。
优选的,该调节驱动模块1移动功能采用大轮胎,四驱动电机12直连驱动,运行平稳;利用轮胎11两边的驱动电机12差速实现轮胎11转向,转向灵活。同时前后安装传感器,当遇到障碍物,能实现智能避障;遇到田地边缘,能实现自动掉头,并进行下一行的种植动作,保证设备的独立操作的安全性、机动性,从而脱离人工监督种植。驱动电机12和传动轴13利用蜗轮蜗杆啮合,利用自锁能力,防止上下坡种植时溜坡现象。保证种植行、间距的准确性。
轮胎11通过移动杆17旋转,实现横向移动,适应不同田垄间种植所需轮胎中心距;通过轮胎启停间距及钻头下扎频率实现不同农作物种植所需间距调整。多方面贴合现实种植。在满足农作物生长空间需求的前提下,在有限的田地种植尽量多的农作物,实现经济效益最大化。
如图1-3所示,钻孔模块2包括钻头主体21、连接块22、连接套筒23、横杆24、竖杆25、电机26、滑杆27,横杆24的上下两侧位置处分别设置有滑杆27,钻头主体21的上侧外部螺栓连接有连接套筒23,连接套筒23的外侧位置处设置有连接块22,两个滑杆27通过套接连接方式和连接块22进行连接,横杆24通过螺纹连接方式和连接块22进行连接,横杆24的中间位置处设置有竖杆25,横杆24和竖杆25的连接位置处设置有连接螺纹块,横杆24的一侧末端传动连接有电机26,电机26能驱动横杆24进行转动,钻头主体21能通过连接块22在横杆24上利用螺纹进行移动,连接块22能通过螺纹在竖杆25上进行移动,转动架32和储存箱33的内部连接位置处设置有转动电机,分筛轮34的中间下侧位置处设置有步进电机,储存箱33能通过转动电机进行转动。
优选的,该钻孔模块中钻头主体21开合无动力来源驱动,设计采用钻桶下扎同步顶压深度限位型材,从而使深度开合块通过连杆拉放实现钻头开合,通过调整深度限位型材高度,匹配下扎深度,可实现种植深度自由调整。且设计采用两个钻头主体21同时进行工作,提升种植效率。
种植行、间距可自由调整,钻桶通过横杆24旋转实现横向移动,从而自由调节种植行距,适应多种农作物所需不同行距种植。
如图1-3所示,种苗运输模块3包括滑道31、转动架32、储存箱33、分筛轮34,储存箱33的中间上侧位置处设置有转动架32,储存箱33的外侧位置处设置有滑道31,滑道31的下侧末端位置处设置有分筛轮34。
优选的,种苗运输功能出苗即落苗,设计储存箱33与运输滑道31为一体,接分筛装置运苗,准确投放至指定区域。种苗储藏功能,设计采用盘状储藏方式,设备携带双盘使容量大幅度提升。整机适应多种需要通过育苗杯类方式进行移栽种植的种苗。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种手臂间距可调的注塑机用机械手装置
- 一种间距可调的新型手摇式绕管装置
- 一种可调节折叠式的智能自行车
- 一种间距可调的农业种植机械
- 一种可调节间距的种植机械