一种基于AI技术的交通监管系统及其方法
文献发布时间:2024-04-18 19:48:15
技术领域
本发明涉及交通监管技术领域,具体为一种基于AI技术的交通监管系统及其方法。
背景技术
随着人工智能(Artificial Intelligence,AI)技术研究和进步,人工智能技术正在应用于各种不同的领域,在交通领域也得到了广泛应用。特别在智能交通监管过程中,智能监管源于人工智能的研究,智慧交通是智慧城市建设的重要组成部分。
近年来,汽车保有量快速增长,汽车的大范围普及推动了工业进步、经济发展,同时也带来了一系列交通问题与城市管理问题,其中最主要的就是拥堵问题;目前为了解决城市拥堵,为了解决交通拥堵问题,对于预定义类别车辆(例如渣土车、大卡车)往往通过路牌或者在车道中固定显示对于预定义类别车辆的通行限制措施,还有针对车牌号码对相关的车辆进行限行管理,这种方式虽然可以缓解一部分交通拥堵问题,但是在工作日的上下班高峰期,还是会存在一定量的交通拥堵问题,对于这种问题,相关部门会指派相应的交通管理人员来指挥指定区域的交通,这种方式虽然有助于解决交通拥堵问题,但是增强了交通管理人员的工作强度,同时交通管理人员在道路中心指挥也存在一定的安全隐患。
因此,如何实现智慧交通的监管和疏导,成为该领域的主要问题。
发明内容
针对现有技术的不足,本发明提供了一种基于AI技术的交通监管系统及其方法,解决了背景技术中所提出的问题。
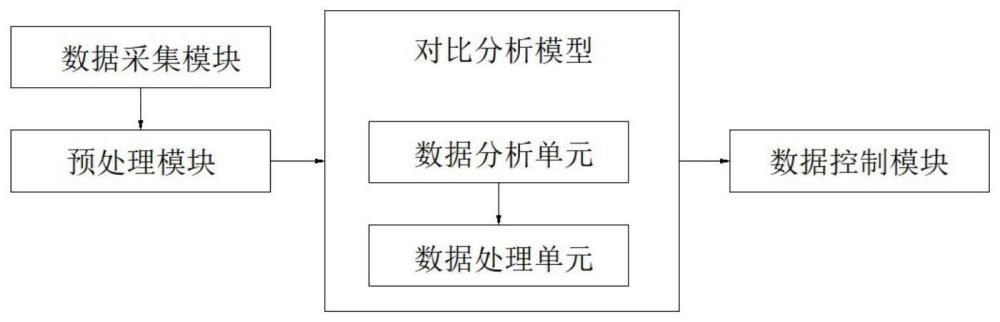
为实现以上目的,本发明通过以下技术方案予以实现:一种基于AI技术的交通监管系统,包括:
数据采集模块,用于采集该指定道路的监控信息一和监控信息二,并将其发送至预处理模块;其中,指定道路为一条道路中处于两处信号灯之间的道路区域,监控信息一为在指定道路出行路口处设置的信号灯在红灯状态下,然后在相应车道上不同位置所采集的监控图像,监控信息二为在指定道路在无车行驶环境下,然后在相应车道上不同位置所采集的监控图像;
预处理模块,用于将指定道路划分为多个分析车道,并对监控信息一和监控信息二进行图像拼接处理和图像灰度化处理,分别得到背景图像和实时图像,随后将其导入预训练的对比分析模型中;
对比分析模型,其分别与预处理模块和数据控制模块通信连接,且对比分析模型包含数据分析单元和数据处理单元;
所述数据分析单元用于从识别样本和实时图像中,获取相应分析车道的行径路线,并将行径路线的中心位置作为分析路线,随后在分析路线上划分多个分析节点,并获取识别样本和实时图像中分析节点的灰度值,再通过识别样本和实时图像各自在分析节点的灰度值计算出灰度差值,然后对灰度差值进行计算分析,得到分析序列表,再计算出分析序列表内各个相邻分析节点的差值绝对值,随后将其结果发送至数据处理单元;
其中,相邻两个分析节点之间的距离为人为预设值,且多个相邻的分析车道之间距离相同;
所述数据处理单元用于根据两组相邻分析节点的距离值,计算出分析序列表中两组相邻分析节点之间距离差,随后将距离差与预设的距离对比值进行比较,根据比较结果,然后计算出相应分析车道上车辆的拥堵距离,随后将拥堵距离发送至数据控制模块;
数据控制模块,用于将相应分析车道上车辆的拥堵距离导入预设的控制列表中,并根据拥堵距离与控制列表内预设的拥堵距离区间,获得相应的信号灯控制时间,随后将信号灯控制时间设定为相应分析车道上的绿灯持续时间。
优选的,所述监控图像通过在指定道路上设置的多个监控摄像头采集得到,且相邻的两个监控摄像头的监控区域相衔接。
优选的,所述预处理模块的具体处理方式如下:
A1、首先获取指定道路上的左转车道、直行车道和右转车道,随后按照左转车道、直行车道和右转车道将指定道路划分多个分析车道;
A2、随后从监控信息一中获取各个分析车道中多个监控摄像头采集的监控图像,并将其进行拼接,得到拼接图像,并将其作为各个分析车道的背景图像;
A3、将各个分析车道的背景图像进行图像灰度化处理,随后将图像灰度化处理后的背景图像作为识别样本,并导入预训练的对比分析模型中;
A4、然后从监控信息二中获取各个分析车道的多个监控摄像头采集的监控图像,并将其进行拼接,得到拼接图像,并将其作为各个分析车道的实时图像;
A5、将各个分析车道的实时图像进行图像灰度化处理,随后将图像灰度化处理后的实时图像导入预训练的对比分析模型中。
优选的,在步骤A2和A4中,拼接图像的获取方式如下:
B1、依据指定道路上车辆行驶朝向,将多个监控摄像头从指定道路的行驶朝向的终点位置开始编码标记,标记编码按照从小到大的顺序依次标记;
B2、随后从监控信息一和监控信息二中获取各个分析车道中多个监控摄像头采集的监控图像,按照相应编码顺序进行排序并拼接,得到相应的拼接图像。
优选的,所述数据分析单元的具体分析方式如下:
D11、将识别样本和实时图像中,将该分析车道的行径路线的中心位置作为分析路线;
D12、随后将分析路线划分为若干个等距分布的分析节点,同时依据若干个分析节点从识别样本和实时图像中获取相应分析节点的灰度值;
并将识别样本和实时图像中相应分析节点的灰度值分别标记为Yi和Si,i=1、2、……、n,i表示第几个分析节点,n表示分析节点的数量;
D13、随后通过Ci=|Si-Yi|,得到各个分析节点的灰度差值Ci;
D14、然后通过
随后将计算得到的离散值CL与预设的离散阈值CL0进行比较,若CL>CL0,则认为这一组数据的离散值CL过大,按照|Ci-Cp|从大到小的顺序依次删除对应的Ci值并对应计算剩余的离散值,直至Ci D15、再从所有被删除的Ci中获取相应i的值,并将相应的i值按照从小到大的顺序进行排序,得到分析序列表; D16、之后在分析序列表中,获取两组相邻i的差值绝对值,并将其记为Gj,j=1、2、……、m,j表示第几个相邻的i,m表示在排序后的分析序列表中两组相邻i的数量。 优选的,所述数据处理单元的具体处理方式如下: D21、随后获取两组相邻分析节点的距离值,然后将距离值标记为W; D22、接着通过公式GCj=Gj*W,求出分析序列表中两组相邻i之间距离差GCj,然后将GCj与预设的距离对比值GC0进行比较,然后根据比较结果,计算出相应分析车道上车辆的拥堵距离; D23、随后将相应分析车道上的拥堵距离发送至数据控制模块。 优选的,在步骤D22中GCj与GC0比较方式如下: 首先令j的值为1,若GCj>GC0,则在j的值为1时,获取相应的两组相邻i,并在两组相邻i中获取i值最小的一组i值; 随后通过公式Z=i*W,得到该分析车道上车辆的拥堵距离Z; 若GCj 一种基于AI技术的图像分析方法,该方法上述的一种基于AI技术的图像分析系统实现。 有益效果 本发明提供了一种基于AI技术的交通监管系统及其方法。与现有技术相比具备以下有益效果: 本发明通过监控摄像头获取指定道路上监控图像,随后通过对其进行分析处理,获得相应分析车道上车辆的拥堵距离,然后结合控制列表内预设的拥堵距离区间,获得相应的信号灯控制时间,并重新设定路口红绿灯的通行时间,可以有效优化路况,提高车辆通行速度。 本发明采用多点采集并集合汇总的方式,获取指定道路上的全景图像,提高了道路数据采集的精准性,同时对图像进行预处理,便于对同一时间点的交通拥堵状态进行快速解析,提高分析结果的获取速度,便于红绿灯的通行时间的提前设定,具有较好的实时性。 附图说明 图1为本发明的系统框图; 图2为本发明的方法流程图。 具体实施方式 下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。 作为本发明的实施例一 请参阅图1,本发明提供一种技术方案:一种基于AI技术的交通监管系统,包括: 数据采集模块,用于在指定道路出行路口处设置的信号灯在红灯状态下,采集该指定道路的监控信息一,同时采集该指定道路在无车行驶环境下的监控信息二;并将监控信息一和监控信息二发送至预处理模块,监控信息一和监控信息二均为对指定道路中相应车道上不同位置所采集的监控图像,其中监控图像通过在指定道路上设置的多个监控摄像头采集得到; 其中指定道路为一条道路中处于两处信号灯之间的道路区域; 预处理模块,用于将指定道路划分为多个分析车道,并对监控信息一和监控信息二进行图像拼接处理和图像灰度化处理,该技术为现有技术,故此处不做赘述,分别得到背景图像和实时图像,随后将其导入预训练的对比分析模型中,其具体处理方式如下: A1、首先获取指定道路上的左转车道、直行车道和右转车道,随后按照左转车道、直行车道和右转车道将指定道路划分多个分析车道; A2、随后在指定道路上车辆行驶朝向,将多个监控摄像头从指定道路的行驶朝向的终点位置开始编码标记,标记编码按照从小到大的顺序依次标记; A3、随后从监控信息一中获取各个分析车道中多个监控摄像头采集的监控图像,按照相应编码顺序进行排序并拼接,得到拼接图像,并将其作为各个分析车道的背景图像; A4、将各个分析车道的背景图像进行图像灰度化处理,随后将图像灰度化处理后的背景图像作为识别样本,并导入预训练的对比分析模型中; A5、然后从监控信息二中获取各个分析车道的多个监控摄像头采集的监控图像,按照相应编码顺序进行排序并拼接,得到拼接图像,并将其作为实时图像; A6、将各个分析车道的实时图像进行图像灰度化处理,随后将图像灰度化处理后的实时图像导入预训练的对比分析模型中; 其中,相邻两个分析节点之间的距离为固定值,且多个相邻的分析车道之间距离相同; 本发明采用多点采集并集合汇总的方式,获取指定道路上的全景图像,提高了道路数据采集的精准性,同时对图像进行预处理,便于对同一时间点的交通拥堵状态进行快速解析,提高分析结果的获取速度,便于红绿灯的通行时间的提前设定,具有较好的实时性。 对比分析模型,其包括数据分析单元和数据处理单元,且对比分析模型用于通过数据分析单元对识别样本和实时图像进行对比分析,并得到分析序列表,再计算出分析序列表内各个相邻分析节点的差值绝对值,之后通过数据分析单元依据两组相邻分析节点的距离值,计算出分析序列表中两组相邻分析节点之间距离差,随后将距离差与预设的距离对比值进行比较,根据比较结果,然后计算出相应分析车道上车辆的拥堵距离,随后将其结果发送至数据控制模块;其对比分析方式如下: D1、以一段指定道路为例,在该指定道路获取的识别样本和实时图像中,将该分析车道的行径路线的中心位置作为分析路线; D2、随后将分析路线划分为若干个等距分布的分析节点,同时依据若干个分析节点从识别样本和实时图像中获取相应分析节点的灰度值; 并将识别样本和实时图像中相应分析节点的灰度值分别标记为Yi和Si,i=1、2、……、n,i表示第几个分析节点,n表示分析节点的数量; D3、随后通过Ci=|Si-Yi|,得到各个分析节点的灰度差值Ci; D4、然后通过 随后将计算得到的离散值CL与预设的离散阈值CL0进行比较,若CL>CL0,则认为这一组数据的离散值CL过大,按照|Ci-Cp|从大到小的顺序依次删除对应的Ci值并对应计算剩余的离散值,直至Ci D5、再从所有被删除的Ci中获取相应i的值,并将相应的i值按照从小到大的顺序进行排序,得到分析序列表,之后在分析序列表中,获取两组相邻i的差值绝对值,并将其记为Gj,j=1、2、……、m,j表示第几个相邻的i,m表示在排序后的分析序列表中两组相邻i的数量; D6、随后获取两组相邻分析节点的距离值,且在分析路线中所有相邻的两个分析节点的距离值相同,然后将距离值标记为W; D7、接着通过公式GCj=Gj*W,求出分析序列表中两组相邻i之间距离差GCj,然后将GCj与预设的对比值GC0进行比较,比较方式如下: 首先令j的值为1,若GCj>GC0,则在j的值为1时,获取相应的两组相邻i,并在两组相邻i中获取i值最小的一组i值,随后通过公式Z=i*W,得到该分析车道上车辆的拥堵距离Z; 若GCj D8、随后将相应分析车道上的拥堵距离发送至数据控制模块; 数据控制模块,用于将相应分析车道上车辆的拥堵距离导入预设的控制列表中,并根据拥堵距离与控制列表内预设的拥堵距离区间,获得相应的信号灯控制时间,随后将信号灯控制时间设定为相应分析车道上的绿灯持续时间; 本发明通过监控摄像头获取指定道路上监控图像,随后通过对其进行分析处理,获得相应分析车道上车辆的拥堵距离,然后结合控制列表内预设的拥堵距离区间,获得相应的信号灯控制时间,并重新设定路口红绿灯的通行时间,可以有效优化路况,提高车辆通行速度。 作为本发明的实施例二 该实施例与实施例一的不同之处在于,该实施例中,相邻两个分析节点之间的距离为人为预设值,且多个相邻的分析车道之间距离相同; 请参阅图2,本发明还提供一种技术方案:一种基于AI技术的交通监管方法,该方法使用上述基于AI技术的交通监管系统来实现,该方法包括以下步骤: 步骤一、信息采集 在指定道路出行路口处设置的信号灯在红灯状态下,采集该指定道路的多个监控图像,同时采集该指定道路在无车行驶环境下的多个监控图像; 步骤二、信息预处理 将步骤一的采集结果进行图像拼接处理和图像灰度化处理,分别得到背景图像和实时图像,并导入预训练的对比分析模型中; 步骤三、图像分析 首先从识别样本和实时图像中,获取相应分析车道的行径路线,并将行径路线的中心位置作为分析路线,随后在分析路线上划分多个分析节点; 再通过预训练的对比分析模型获取识别样本和实时图像各自在分析节点的灰度值,并计算出灰度差值,然后对灰度差值进行计算分析,得到分析序列表; 之后计算出分析序列表内各个相邻分析节点的差值绝对值; 步骤四、计算处理 根据两组相邻分析节点的距离值,计算出分析序列表中两组相邻分析节点之间距离差,随后将距离差与预设的距离对比值进行比较,根据比较结果,然后计算出相应分析车道上车辆的拥堵距离; 步骤五、设备控制 将相应分析车道上车辆的拥堵距离导入预设的控制列表中,并根据拥堵距离与控制列表内预设的拥堵距离区间,获得相应的信号灯控制时间,随后将信号灯控制时间设定为相应分析车道上的绿灯持续时间。 同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。 以上对本发明的一个实施例进行了详细说明,但内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
- 一种基于AI系统的保险标的远程估价方法
- 一种基于AI系统的银行取证方法
- 基于AI技术和生物识别交叉认证的驾培作弊监管系统和监管方法
- 基于AI语义动态孪生公共交通监管方法、装置及系统