用于氧传感器的补偿器电路和方法
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及大范围氧气(O
发明的背景
通常,O
O
在大范围的空气燃料传感器中,必须将传感器的温度严格控制在约750℃的温度。通过在传感器内使用电式阻陶瓷加热元件可实现该温度。通常,在O
因此,换言之,如上所述,在大范围的空气燃料传感器中,必须将传感器的温度严格控制在约750℃的温度。通过在传感器内使用电阻式陶瓷加热元件可实现该温度。该元件能够单独从周围环境或通过补充发动机废热来加热传感器。为了向电阻式陶瓷加热元件供电,汽车12V电池电压以脉冲宽度调制方式施加在元件两端上。测量传感器参考单元的阻抗,并将其用于指示传感器的温度。利用控制回路来修改PWM占空比,以调节加热量以维持期望的温度。
在O
本发明的一个目标是克服这些问题。
发明内容
在一个方面,提供了一种用于氧传感器的补偿器电路,所述氧传感器包括泵单元和参考单元,所述补偿器电路包括被配置成用于将参考单元维持在参考电压的反馈控制回路,所述反馈控制回路包括数字补偿器,该数字补偿器被配置成用于:取决于从所述参考单元测量的参考电压来确定补偿电流并将该补偿电流输出到所述泵单元,并且该数字补偿器进一步被配置成用于:取决于检测到氧传感器加热器脉冲宽度调制(PWM)信号中的边沿,在设定的时间内暂停确定和输出所述补偿电流。
所述数字补偿器可以是可编程的。
所述设定时间可以是可编程的。
补偿器电路可以被配置成用于:在检测到所述PWM信号的上升沿或下降沿后,在设定时间内暂停确定和/或输出所述补偿电流。
补偿器电路可以包括用于检测所述PWM信号的上升沿或下降沿的装置。
补偿器电路包括用于在检测到所述PWM信号的上升沿或下降沿之后提供暂停信号或可编程长度的时间的装置。
补偿器电路可以进一步被配置成用于将测得的参考单元的参考电压转换成数字量,并且进一步被配置成用于以数字形式将该数字量与数字参考值比较,以便提供用于数字补偿器的数字比较,其中,所述补偿电流是从所述数字比较确定的。
补偿器电路可以进一步包括用于确定要被输出到泵单元的补偿电流并将该补偿电流转换成数字值的装置。
电路可以被配置成用于:通过被配置成用于暂停接收从所述参考单元导出的输入和/或暂停确定和/或输出所述输出电流,来暂停所述补偿电流的确定和输出。
在进一步的方面中,提供了一种氧传感器系统,包括:氧传感器,所述氧传感器包括泵单元和参考单元,并且包括加热器装置,该加热器装置被配置成用于接收PWM信号以控制所述加热器,并且如上的补偿器电路连接到所述氧传感器。
在进一步的方面中,提供了一种操作用于氧传感器的补偿器电路的方法,所述氧传感器包括泵单元和参考单元,所述补偿器电路包括被适配成将参考单元维持在参考电压的反馈控制回路,所述反馈控制回路包括数字补偿器,该数字补偿器被配置成用于:取决于从所述参考单元测量的参考电压来确定补偿电流并将该补偿电流输出到所述泵单元,该方法包括:a)检测氧传感器加热器脉冲宽度调制(PWM)信号中的边沿;b)取决于步骤a),在设定时间内暂停确定和输出所述补偿电流。
所述设定时间可以是可编程的。
步骤a)可以包括:在检测到所述PWM信号的上升沿或下降沿后,在设定时间内暂停确定和/或输出所述补偿电流。
该方法可以包括:在检测到所述PWM信号的上升沿或下降沿后,提供暂停信号或暂停信号可编程时间量。
该方法可以包括以下步骤:将测得的参考单元的参考电压转换成数字量,并且以数字形式将该数字量与数字参考值比较,将数字比较提供给所述数字补偿器,并且从所述数字比较确定所述补偿电流。
步骤b)可以包括:暂停接收从所述参考单元导出的输入和/或暂停确定和或输出所述输出电流。
附图说明
现在参照附图通过示例的方式来描述本发明,其中:
图1示出了具有模拟补偿器的现有O
图2示出了由于PWM边沿引起的泵电流中断;
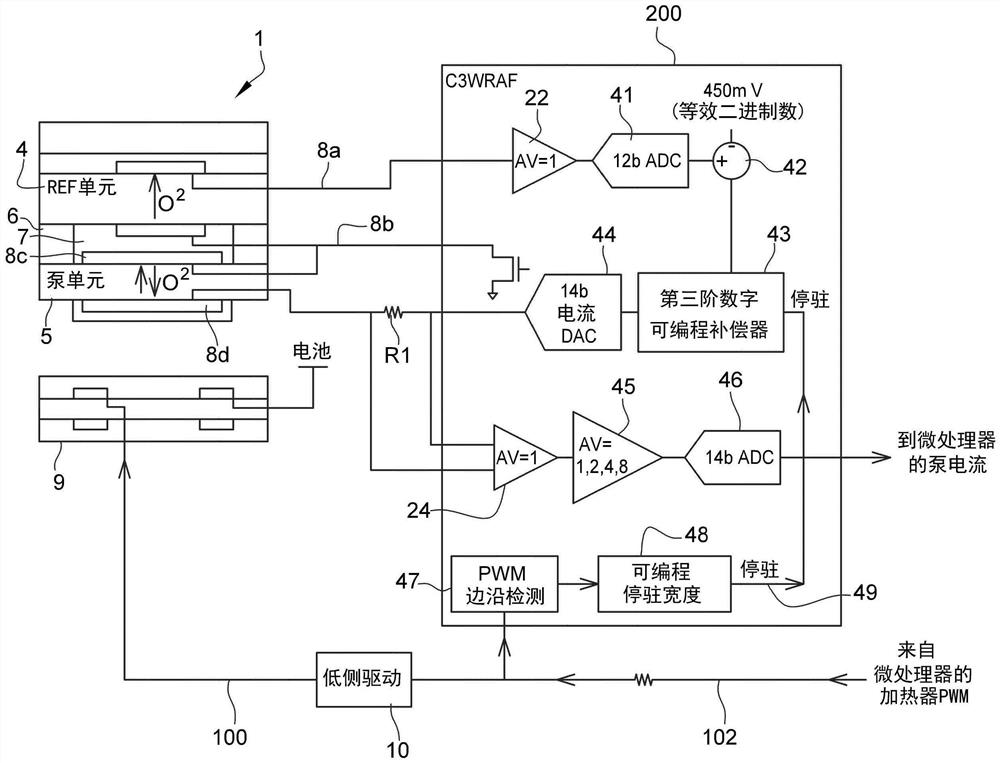
图3示出了具有数字补偿器和“停驻(park)”功能的新型O
图4示出了将数字补偿器停驻在PWM边沿上时的泵电流中断。
具体实施方式
图1示出了已知的O
应当注意,传感器接口IC 2的任何功能可以由微处理器执行,反之亦然。
在左手侧示出了传感器本身,该传感器本身是本领域中已知的2个单元的传感器。传感器(元件)包括测量或参考(REF)单元4和泵单元5。两个单元4、5在侧面上通过多孔扩散部件6(其提供/限定了多孔扩散通道)分开,以便形成气体检测腔7。电极8a、8b、8c、8d位于单元4、5的任一侧上,并向系统的其他部分(电路)提供适当的输入和输出。
与O
两个单元4、5的电极8a、8b、8c、8d连接到传感器接口IC 2/电路,传感器接口IC 2具有到未示出的微处理器的输入和输出连接,该微处理器用于测量和处理来自电极(经由传感器接口IC 2)的输入以及用于经由FET 16控制电极8b和8c的电压的输出。未示出从微处理器到FET16的线。
两单元O
该图示出了中间IC/电路的偏置控制电路部分,该部分实现了由制造商为特定传感器模型指定的传递函数,以确保适当的回路性能。
通过以下操作来完成温度控制:测量参考单元的阻抗以确定温度,以及在陶瓷加热器两端施加电池电压的脉冲宽度调制以施加功率。
因此,关于图1,两单元O
补偿器包括从电极8a到单位增益放大器22的连接。单位增益放大器22的输出连接到运算放大器电路20的一个输入。到运算放大器电路20的另一输入连接到(例如450mV)的电压。由分立电阻器、电容器和运算放大器21组成的运算放大器电路20实现期望的传递函数以稳定该控制回路。
运算放大器电路20的输出连接到电压至电流转换器23,该电压至电流转换器23取决于从运算放大器电路20输出的电压而经由电极8d调节进入泵单元5的电流。因此,进入泵单元5的电流修改了回路保持在例如450mV的参考电压。达到450mV的参考电压所需的泵电流值取决于排气中的O
通过由单位增益放大器24测量电阻R1两端的电压来测量泵电流,然后由适当的比例(scaling)放大器25对该泵电流进行放大,该比例放大器25的输出沿线101被发送到微处理器–微处理器将表示O
如图1所示,该补偿器在现有技术中是一种模拟补偿器,其利用运算放大器以及外部电阻器和电容器来实现传递函数。
次级控制是前面所述的传感器温度控制回路。
如简要提到的那样,问题是,当加热器电线100上的瞬态电压和电流耦合到参考单元中时,这会对主控制回路造成破坏,因为它显示为与450mV的期望参考单元考电压的偏差。由于控制回路的性质,当回路试图校正参考单元噪声时,这种破坏会导致泵电流发生变化。最终,回路将从噪声中恢复并返回其稳态,但是与此同时,泵电流出现错误,进而导致A/F比出现错误。
因此,换言之,用于加热器的电线与参考单元电线以及泵单元电线位于同一线束中。加热器电线与参考电线和公共电线之间的耦合可导致参考电压的周期性中断,这会干扰控制回路。(耦合也发生在传感器本身内。)
这会导致大的泵电流干扰,这种干扰花费大量时间才能稳定(settle out)实际的泵电流。该稳定时间会降低系统获得准确的发动机同步泵电流测量值的能力。
图2示出了由PWM边沿耦合到参考单元上引起的干扰的范围图,其引起泵单元电流干扰,即,由于PWM边沿引起的泵电流干扰。在此示例中,泵电流干扰约为130μA,且持续约400μs。该图示出了泵电流30、带有开关边沿32的加热器电压/电流31、和参考单元电压33。
发明
图3示出了本发明的示例,其示出了根据一个示例的补偿器电路的设计。此处(在O
另外,可以提供“停驻”特征以克服上述引述的问题,如将在下文中描述的。
与图1类似的部件具有相同的附图标记。在这里,来自电极8a的输入再次通过单位增益放大器22,并随后输入到模数转换器(ADC)41,在该模数转换器41处,电压电平被转换为数字量。经由数字减法器电路42从ADC 41的输出中减去比特序列,该比特序列为例如与450mV(参考单元的标称电压)等效的二进制。减法器电路的输出然后被馈送到数字可编程补偿器43,在一个示例中,数字可编程补偿器43可以是三阶补偿器。数字可编程补偿器43的输出连接到电流DAC 44。电流DAC 44通过R1连接至泵单元电极8d,并向泵单元输出电流,以将参考单元电压维持在450mV。电流DAC 44的输出经由电极8d向泵单元提供必需的电流,以维持初级控制,即,提供适当的传感器电压/电流偏置。
可选地,可以通过查看电阻器R1两端的电压,以类似于图1的方式再次确定流向泵单元5的电流,即流向电极8d的电流,其中该电阻器两端的电压再次馈送到单位增益放大器24,其输由可编程增益放大器45进一步放大。在该示例中,可编程增益放大器45具有1、2、4或8的可编程增益,并且其输出被馈送到模数转换器ADC 46。
微处理器读取该转换器的数字输出。
另外,具有经调节的加热器PWM信号(来自微处理器)到数字可编程补偿器43的输入。这是经由PWM边沿检测电路/功能块47实现的,其中PWM加热器信号从线路102从微处理器输出馈送到加热器低侧驱动10并馈送到PWM边沿检测块47。
应当注意,低侧驱动器10可以被结合到传感器接口IC 200中,或者可以是单独集成电路的整体或一部分。
PWM边沿检测块47检测PWM信号的边沿(即,上升沿或下降沿);即检测加热器开关边缘(例如,从低到高或从高到低)。PWM边沿检测块47的输出连接到可编程停驻宽度电路48(可编程停驻信号发生器),该电路确定“停驻”或暂停时间信号,该时间信号具有可编程时间和可变时间(并且该时间信号从检测到由PWM边沿检测块47检测到的边沿开始),该时间信号被馈送到数字可编程补偿器43。数字可编程补偿器43在停驻时间期间暂停某些处理,以避免来源于边沿的中断。当停驻时间期满时,补偿器单元恢复正常操作。在停驻数字补偿器时,泵电流保持恒定于在停驻信号激活之前其所处于的任何值。
还参照图4描述了该停驻特征的实现(图4以相同的附图标记示出了与图2相同的图),并且示出了利用PWM边沿检测块47和可编程停驻宽度电路48经由线49向数字可编程补偿器43提供输入的实现。
当数字可编程补偿器43接收到“停驻”命令或“停驻”信号时,它不再接受来自ADC41/数字减法器电路42的A/D转换器输入,并冻结传递函数的计算。在停驻命令/信号期满时,数字可编程补偿器43恢复正常操作。这可以有效地掩盖进入数字可编程补偿器43的噪声。另一好处涉及由于PWM边沿噪声而导致主控制回路中断的问题。
换句话说,本发明的电路感测加热器的PWM边沿并在可编程的时间量内“停驻”数字可编程补偿器43,以便防止参考单元干扰扰乱控制回路。停驻和恢复数字可编程补偿器43涉及相对于ADC更新小心地暂停和重启数字可编程补偿器43。这大大降低了泵电流干扰,从而允许改善的发动机同步泵电流(A/F比)读数。
为了进行比较,图4与图2相似,并示出了泵电流30、具有开关边沿32的加热器电压/电流31、以及参考单元电压,并示出了补偿器在PWM边沿处停驻固定时间段的相应波形。图4示出了将数字补偿器停驻在PWM边沿时的泵电流中断。泵电流误差降低到25μA,其中持续时间小于200μs。
应当注意,传感器接口IC 200的任何功能可以由微处理器执行,反之亦然。
另外,可以将ADC 41和/或数字减法器电路42的任何功能结合到数字可编程补偿器43中。同样,PWM边沿检测块47和/或可编程停驻宽度电路48的任何功能都可以在数字可编程补偿器43中实现。
另外,电流DAC 44的功能可以在数字可编程补偿器43中实现。
术语“停驻”应解释为“暂停”,因此,就停驻数字补偿器活动而言,应替代地将其视为暂停(暂停和重启)数字补偿器活动/功能。