一种高精度脉冲宽度调制系统及方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及脉冲宽度调制系统,尤其涉及具有多相位时延的高分辨率脉冲宽度调制系统。
背景技术
脉冲宽度调制(PWM,Pulse Width Modulation)是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。如何产生高精度的PWM信号并精细调节PWM信号的脉冲宽度是本领域面临的重大挑战。
现有的部分脉冲宽度调制系统中有采用时延锁定环路(DLL-Delay Locked Loop)对PWM信号进行控制,如图1所示。该时延锁定环路没有提供多相位的时延输出信号,因而不能用于需要精细时延分辨率的系统应用。
此外,现有技术中还有提出在时延锁定环路中实现利用5x8延迟单元构成40个多相位时延信号输出。但是,其输入端的多相位信号的产生采用了模拟电路插值技术,容易导致多相位输入信号出现相位误差,并且也没有提供高精度脉冲宽度调制的实现方式。
发明内容
为了实现对脉冲宽度信号的高精度调制,本发明提供了一种高精度脉冲宽度调制系统和一种高精度脉冲宽度调制方法。
本发明的高精度脉冲宽度调制系统包括多相位时延锁定环路系统和PWM信号后处理器。
多相位时延锁定环路系统被配置成基于输入参考频率信号生成M个主相位信号Q
PWM信号后处理器根据调制精度要求,将从被校准后的N个时延信号中选出的一时延信号P
在一个实施例中,所述多相位时延锁定环路系统包括主相位信号发生器,被配置成基于所述输入参考频率信号生成所述M个主相位信号Q
在一个实施例中,所述多相位时延锁定环路系统还包括相位锁定环路。该相位锁定环路包括时延模块、电荷泵式鉴相器、环路滤波器以及模数转换器。
所述时延模块包括M条时延线,每条时延线对应接收M个主相位信号中的一个主相位信号,每条时延线包括S个依次串联的数控时延单元;在所述时延模块不存在误差的情况下,每条时延线对其对应的所述主相位信号进行时延后输出S个依次具有同一相位差的时延信号,使得各时延信号之间具有时延ΔT=1/(Fout*M*S),具有相移差360/(M*S)度。
所述电荷泵式鉴相器被配置成比较第j条时延线中的最后一个时延单元所输出的时延信号P
所述环路滤波器将所述比较结果转换成模拟电压值。
所述模数转换器,将所述模拟电压值转换成所述数字误差信号,所述数字误差信号带有P
在一实施例中,所述多相位时延锁定环路系统还包括第一选通器、第二选通器以及数字状态机。
所述第一选通器被配置成经所述数字状态机的控制从所述时延模块的输出中选择出P
所述第二选通器被配置成经所述数字状态机的控制从M个数字主相位信号Q
所述数字状态机被配置成根据来自主控单元的状态控制信号以及所述数字误差信号进行所述第一选通器和第二选通器的信号选通控制以及系统控制。
在一个实施例中,所述数字状态机根据所述状态控制信号选择仅对M个数字主相位信号中的某一个主相位信号所对应的时延线所输出的时延信号进行相位误差校准,还是对全部M个数字主相位信号所对应的时延线所输出的时延信号进行相位误差校准。
在一个实施例中,所述数字状态机还根据所述状态控制信号选择所述上升沿或所述下降沿调制方式。
在一个实施例中,在所述数字状态机选择对全部N个时延信号P
在一实施例中,当所述时延信号P
在一实施例中,当所述时延信号P
在一实施例中,所述PWM信号后处理器包括第一D型触发器、第二D型触发器和一个或门;
第一D型触发器的D端输入为所述PWM信号的调制频率F
第二D型触发器的D端输入为所述PWM信号的调制频率F
第一和第二D型触发器的输出作为或门的输入,所述或门的输出为所述高精度调制后的PWM调制信号。
在一实施例中,所述主相位信号发生器为电流模逻辑数字除法器。
在一实施例中,所述主相位信号发生器由多相位环型振荡器及与所述多相位环型振荡器耦接的相位锁定环路实现。
本发明的一种高精度脉冲宽度调制方法包括以下步骤:
提供参考信号频率和PWM信号的调制频率Fpwm;
基于所述参考信号频率生成具有频率Fout的M个数字主相位信号,所述M个主相位信号依次具有相位差360/M度;
提供具有M条时延线的时延模块对M个数字主相位信号进行时延得到N个时延信号P
选择N个时延信号P
根据调制精度要求,将从被校准后的N个时延信号中选出的一时延信号P
在一个实施例中,所述提供具有M条时延线的时延模块对M各数字主相位信号进行时延得到N个时延信号P
每条时延线对应接收M个主相位信号中的一个主相位信号,其中,每条时延线包括S个依次串接的数控时延单元;
在所述时延模块不存在误差的情况下,每条时延线对其对应的所述主相位信号进行时延后输出S个依次具有一相位差的时延信号,使得各时延信号之间具有时延ΔT=1/(Fout*M*S),具有相移差360/(M*S)度。
在一个实施例中,所述选择N个时延信号P
仅对M个数字主相位信号中的某一个主相位信号所对应的时延线所输出的时延信号进行相位误差校准;或
对全部M个数字主相位信号所对应的时延线所输出的时延信号进行相位误差校准。
在一个实施例中,所述选择N个时延信号P
选择第j条时延线中的最后一个时延单元所输出的时延信号P
将所述比较结果转换成模拟电压值;
将所述模拟电压值转换成所述数字误差信号,所述数字误差信号带有P
在一个实施例中,当所述时延信号P
在一个实施例中,当所述时延信号P
本发明的高精度脉冲宽度调制系统和方法在多相位时延锁定环路中应用极佳,能实现对脉冲宽度信号的高精度调制。
附图说明
本发明的以上发明内容以及下面的具体实施方式在结合附图阅读时会得到更好的理解。需要说明的是,附图仅作为所请求保护的发明的示例。在附图中,相同的附图标记代表相同或类似的元素。
图1示出现有技术中的时延锁定环路;
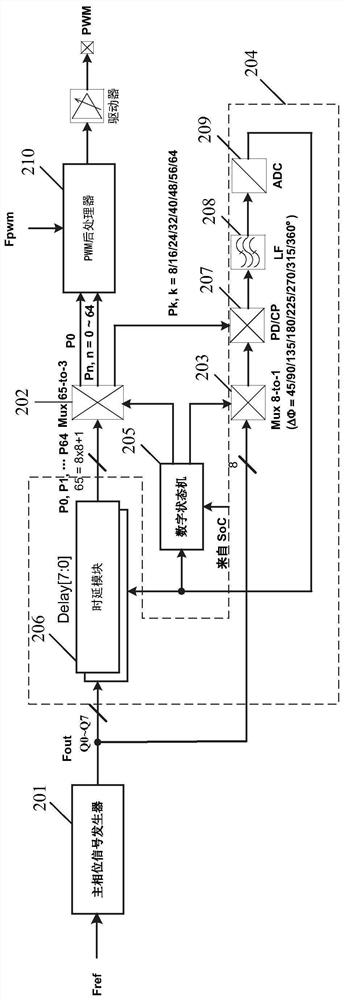
图2示出根据本发明一实施例的基于多相位时延的高分辨率脉冲宽度调制系统;
图3示出根据本发明一实施例的PWM后处理器的逻辑电路;
图4示出根据本发明一实施例的PWM后处理器的输入和输出信号时序关系图;
图5示出根据本发明一实施例的系统工作及控制流程图。
具体实施方式
以下在具体实施方式中详细叙述本发明的详细特征以及优点,其内容足以使任何本领域技术人员了解本发明的技术内容并据以实施,且根据本说明书所揭露的说明书、权利要求及附图,本领域技术人员可轻易地理解本发明相关的目的及优点。
本发明的脉冲宽度调制系统是一个基于多相位时延(MP DLL)的高分辨率脉冲宽度调制(HR PWM)系统。如图2所示,该系统包括多相位时延锁定环路系统和PWM信号后处理器210。
多相位时延锁定环路系统包括主相位信号发生器201、第一选通器202、第二选通器203、相位锁定环路204以及数字状态机205。相位锁定环路204包括时延模块206、电荷泵式鉴相器207、环路滤波器208以及模数转换器(ADC)209。
主相位信号发生器201基于输入参考频率信号Fref生成M个数字主相位信号Q
在一个实施例中,主相位信号发生器201可由电流模逻辑数字除法器(CMLDivider,Current Mode Logic Divider)实现。在一个实施例中,该电流模逻辑数字除法器先将单端的输入参考频率信号Fref由电流模逻辑电路转换成全差分信号,再由除4的除法器生成8个主相位信号Q
在一个实施例中,主相位信号发生器201可由多相位环型振荡器(RO,RingOscillator)及相位锁定环路(PLL)实现。例如,多相位环型振荡器可以是8相位环型振荡器,从而生成8个主相位信号Q
时延模块206包括M条时延线Delay[M-1,…,0],每条时延线包括S个相同的数控时延单元,即每个时延线能提供S个相移或时延信号输出。每条时延线对应接收一路主相位信号,在该时延线不存在误差的情况下(或误差被校准后的情况下),该时延线输出S个互相之间依次具有相同相位差的相移或时延信号,这个相位差为360/(M*S)度,使得每条时延线中的最后一个时延单元所输出的相移或时延信号输出与输入下一条时延线的主相位信号的相位相同。
M条时延线共提供了M*S个相移或时延输出信号,即P
需要指出的是,本领域技术人员应了解,术语“相移”与术语“时延”的含义实质相同,因此,本文中所提到的“相移信号”和“时延信号”是指同一种信号,“相位误差”与“时延误差”的含义实质相同。
在一个实施例中,假设M=8,S=8,即主相位信号发生器生成8个主相位信号Q
理想状态下,即,时延模块本身没有误差产生的话,每条时延线中的最后一个时延单元所输出的相移或时延信号输出P
第一选通器202接收来自时延模块的输出,并经由数字状态机205的控制从这些输出信号中选择输出三路信号,这三路信号分别为:
--P
--P
--P
第二选通器203接收M路主相位信号,并经由数字状态机205的控制从这些主相位信号中选出一路信号Q
电荷泵式鉴相器207比较P
电荷泵式鉴相器207将比较结果以模拟电流形式输出至环路滤波器(LF)208,得到一模拟电压值,并随后经模数转换器(ADC)209转换后输出数字量(即数字误差信号)作为控制信号,一路反馈至时延模块206,以调节时延模块的相移或时延误差,一路输出至数字状态机205,用于控制状态机的状态切换,即第一选通器和第二选通器的选通。该控制信号带有P
理想情况下,P
如果电荷泵式鉴相器207经比较发现P
在一个实施例中,本发明的模数转换器(ADC)209所需的分辨率较低,一般4个Bit即可。
在一个实施例中,数字状态机(DSM)205用于系统控制、校正控制以及后处理器的时延选择。数字状态机(DSM)205接收两个信号输入,一个是相位锁定环路204中模数转换器(ADC)209输出的带有相位误差信息的数字误差信号;另一个是来自主控单元(SOC),如芯片中微处理器(MCU)的状态控制信号,例如上电、校准结束、校准开始等控制信号。数字状态机205根据两个输入信号,输出数字控制信号,用于第一、第二选通器的信号选择控制及整个系统的控制。
在一个实施例中,数字状态机205根据状态控制信号可选择仅对M个数字主相位信号中的某一个主相位信号所对应的时延线所输出的时延信号进行相位误差校准,也可以选择对全部M个数字主相位信号所对应的时延线所输出的时延信号进行相位误差校准。上述控制可以通过控制第一和第二选通器的信号选择来进行。
在一个实施例中,数字状态机205还根据所述状态控制信号选择所述上升沿或所述下降沿调制方式。
在一个实施例中,在数字状态机205选择对全部N个时延信号P
PWM后处理器210的输入信号为P
本发明中的PWM后处理器210可由简单逻辑电路实现。图3示出根据本发明一实施例的PWM后处理器的逻辑电路实现。如图3所示,PWM信号后处理器包括第一D型触发器、第二D型触发器和一个或门。第一D型触发器的D端输入为所述PWM信号的调制频率F
在一个实施例中,当时延信号P
在一个实施例中,当时延信号P
后处理器210的输入和输出信号的时序关系由图4给出。为了简单明确,图4中的时序关系仅按8相位输出的时延模块给出,即时延模块总共输出P
本发明系统可对脉冲的下降沿进行调制,时间延迟如,n=1/2/3,或对脉冲的上升沿进行调制,时间延迟如n=4/5/6/7。
需要指出的是,本发明的PWM后处理器210并不限于采用图3示出的逻辑电路来实现。本领域技术人员应理解,PWM后处理器210还可以采用其它模块或电路来实现。
此外,本发明的M和S的数值并不仅限于上述实施例中所提到的数值,还可以根据实际需求(例如精度要求)来选择。此外,本发明的高精度脉冲宽度调制系统也可以在M个主相位信号中只选择其中一个主相位信号所对应的延迟信号的输出相位进行校准,此时,多相位时延锁定环路系统实质变成了单一相位锁定环路。
本发明还公开了一种高精度脉冲宽度调制方法,所述方法包括以下步骤:
提供参考信号频率和PWM信号的调制频率Fpwm;
基于所述参考信号频率生成具有频率Fout的M个数字主相位信号,所述M个主相位信号依次具有相位差360/M度;
提供具有M条时延线的时延模块,对M个数字主相位信号进行时延得到N个时延信号P
选择N个时延信号P
根据调制精度要求,将从被校准后的N个时延信号中选出的一时延信号P
在一个实施例中,所述提供具有M条时延线的时延模块对M各数字主相位信号进行时延得到N个时延信号P
每条时延线对应接收M个主相位信号中的一个主相位信号,其中,每条时延线包括S个依次串接的数控时延单元;
在所述时延模块不存在误差的情况下,每条时延线对其对应的所述主相位信号进行时延后输出S个依次具有一相位差的时延信号,使得各时延信号之间具有时延ΔT=1/(Fout*M*S),具有相移差360/(M*S)度。
在一个实施例中,所述选择N个时延信号P
仅对M个数字主相位信号中的某一个主相位信号所对应的时延线所输出的时延信号进行相位误差校准;或
对全部M个数字主相位信号所对应的时延线所输出的时延信号进行相位误差校准。
在一个实施例中,所述选择N个时延信号P
选择第j条时延线中的最后一个时延单元所输出的时延信号P
将所述比较结果转换成模拟电压值;
将所述模拟电压值转换成所述数字误差信号,所述数字误差信号带有P
在一个实施例中,当所述时延信号P
在一个实施例中,当所述时延信号P
图5示出根据本发明一实施例的系统工作及控制流程图。在电源上电(Power On)及复位后(Reset),参考信号频率Fref和PWM调制信号频率F
(步骤504),数字状态机及选通器(如Mux 65-to-3和Mux 8-to-1)选一固定的时延线的一相移信号或时延信号P
为了便于说明,上述工作流程图中采用了具有8个主相位及64个时延单元的时延线及PWM系统,但是,本发明适用于各种相应的多主相位及多时延单元的系统。
这里采用的术语和表述方式只是用于描述,本发明并不应局限于这些术语和表述。使用这些术语和表述并不意味着排除任何示意和描述(或其中部分)的等效特征,应认识到可能存在的各种修改也应包含在权利要求范围内。其他修改、变化和替换也可能存在。相应的,权利要求应视为覆盖所有这些等效物。
同样,需要指出的是,虽然本发明已参照当前的具体实施例来描述,但是本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,在没有脱离本发明精神的情况下还可做出各种等效的变化或替换,因此,只要在本发明的实质精神范围内对上述实施例的变化、变型都将落在本申请的权利要求书的范围内。