一种三相正反转组合型固态继电器
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及固态继电器,具体涉及一种三相正反转组合型固态继电器。
背景技术
三相正反转固态继电器一般有输入模块、延时互锁模块、驱动模块、功率组件模块。输入模块将两个宽范围的输入电压信号转换成一个固定电压,该固定电压用于提供延时互锁逻辑模块、驱动模块的工作电源。外部控制信号直接控制或者间接通过输入模块控制延时互锁模块工作。延时互锁模块接收控制信号后延时一段时间再将控制信号传输给驱动模块,由驱动模块驱动功率组件模块工作。功率组件模块由多个功率组件和功率组件保护器件组成,功率组件电路的作用是连接电网与负载,通过控制功率组件的通断来实现控制电机的启动停止,通过控制不同的功率组件来改变加载在电机上的相序,实现控制电机正转或者反转。模块本身不带相序检测和缺相检测功能。
图1是现有的具有上电延时互锁功能的三相正反转固态继电器的结构框图,图2是可实现该功能的其中一种基本电路图
如图1所示,三相正反转固态继电器一般由四个部分组成,分别是输入模块、上电延时互锁模块、驱动模块、功率组件模块。输入的宽范围电压信号要求有一定的驱动能力,输入电路将一路输入的宽范围电压信号转换成一个固定的电压,为内部其他模块电路提供工作电源。上电延时互锁模块在接收到控制信号之后,对两路控制信号进行异或逻辑运算,当两路控制信号电平都为1时,相当于正反转信号同时加到模块上,异或电路输出为0,后面的RC延时电路输入为0,正转驱动和反转驱动信号都是0,此时驱动模块将不会接通,输出功率组件模块也不会导通,达到了互锁的目的。当只有一路控制信号时,异或运算电路输出将为1,经过RC延时后(按图中参数大约为80mS),由异或门构成的同向缓冲器将输出1,两个与门的其中一个输入端将得到1,这样相应的控制端将输出1,驱动模块将相应的通道接通以驱动对应的功率组件,这样负载电机上就得到了对应的三相电开始运行。运行期间如果另外一路控制信号也变得有效时,第一个异或门将立即输出0,关断所有的输出,防止功率组件同时全部导通造成相间短路事故发生。从原理图可以看出,给模块的F端加控制信号时,输出端U、V、W将分别接通L1、L2、L3,给模块的R端加控制信号时,输出端U、V、W将分别接通L1、L3、L2,负载电机上得到了不同相序的三相电,实现了三相电机转动方向的控制。
虽然普通的具有上电延时互锁的正反转固态继电器能够实现负载相序切换,并且上电延时互锁的功能在一定程度上消除了外部控制信号切换时导致的负载相间短路的问题。但是实际产品在使用过程中会比价频繁发生相间短路现象,造成系统跳闸和输出可控硅损坏,特别是在电机启动瞬间。究其原因是因为负责驱动可控硅的光耦本身抗干扰能力较差和双向可控硅本身的dv/dt低,电机启动瞬间的大电流造成的干扰使得光耦和双向可控硅都会误触发造成相间短路的发生。当然现在一般都是采用具有高抗干扰能力的光耦做驱动模块和本身具有比较高的dv/dt的单向可控硅来做功率组件模块,使得产品的失效率大大降低了,但是成本很高,主要是具有高抗干扰能力的光耦成本高,还很难采购得到。
因此,如何解决三相正反转固态继电器的可靠性和成本高的问题已成为目前亟需解决的技术问题。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种三相正反转组合型固态继电器。本发明的技术方案如下:
一种三相正反转组合型固态继电器,包括:输入模块、相序检测模块、信号处理模块、驱动模块、功率组件模块;
所述输入模块分别与信号处理模块、驱动模块连接;所述相序检测模块分别与三相电源和信号处理模块连接;所述信号处理模块分别与相序检测模块、输入模块、驱动模块连接;所述驱动模块分别与输入模块、功率组件模块连接;所述功率组件模块分别与驱动模块、三相电源、三相电机连接;其中:
所述输入模块,用于接入外部直流电源,并将所述外部直流电源转换为所述继电器内部需要的直流电源;并用于接入外部输入的两路初始控制信号,将所述两路初始控制信号进行处理后分别发送给信号处理模块、驱动模块;
所述相序检测模块,用于接收三相电源提供的三相交流电,并将输入的三相交流电的过零点检测出来发送给所述信号处理模块;
所述信号处理模块,用于接收所述输入模块和相序检测模块发送的信号,并将这些信号进行处理后得到驱动信号发送给驱动模块;
所述驱动模块,用于接收所述信号处理模块发送的驱动信号,并对所述驱动信号进行处理后得到控制信号发送给功率组件模块;
所述功率组件模块,用于接收驱动模块发送的控制信号,并通过所述控制信号去控制三相电机的通断和相序切换。
可选地,所述“两路初始控制信号”包括:第一路初始控制信号、第二路初始控制信号;当第一路初始控制信号为高,第二路初始控制信号为低时,三相电机正转;当第一路初始控制信号为低,第二路初始控制信号为高时,三相电机反转;当第一路初始控制信号与第二路初始控制信号的差分电压小于3V时,三相电机停止运行。
可选地,所述功率组件模块包括:电磁继电器和可控硅;所述可控硅用于控制三相电机的启停;所述电磁继电器用于控制三相电机的相序切换。
可选地,所述输入模块包括:电源转换子模块、信号转换子模块;电源转换子模块,用于将外部直流电源转换为所述继电器内部需要的直流电压;信号转换子模块,用于将所述两路初始控制信号进行处理后分别发送给信号处理模块、驱动模块。
可选地,所述电源转换子模块包括:电阻R7、电阻R13、电容C12、整流桥D1、电容C14、电容C15、开关电源芯片IC2、电感LL1、电容C8、电阻R9、电容C10、电容C11、电阻R11;其中:
所述电阻R7的第一端、电阻R13的第一端分别连接外部直流电源的两端;所述电阻R7的第二端分别连接电容C12的第一端、整流桥D1的一个输入端;电阻R13的第二端分别连接电容C12的第二端、整流桥D1的另一个输入端;
开关电源芯片IC2设置有第一至第六引脚;整流桥D1的负极接地、整流桥D1的正极连接电容C14的第一端、电容C15的第一端、开关电源芯片IC2的第四、第五引脚;电容C14的第二端、电容C15的第二端均接地;开关电源芯片IC2的第六引脚分别连接电容C8的第一端、电容LL1的第一端;开关电源芯片IC2的第一引脚连接电容C8的第二端;电感LL1的第二端、电阻R9的第一端、电容C10的第一端、电容C11的第一端连接在一起;电容C10的第二端、电容C11的第二端、开关电源芯片IC2的第二引脚均接地;开关电源芯片IC2的第三引脚分别连接电阻R9的第二端、电阻R11的第一端;电阻R11的第二端接地;
可选地,所述信号转换子模块包括:电阻R2、电阻R4、电容C3、光耦U1、光耦U2;其中:
所述电阻R2的第一端、电阻R4的第一端分别接入外部输入的两个初始控制信号;电阻R2的第二端分别连接电容C3的第一端、光耦U1的阳极输入端、光耦U2的阴极输入端;电阻R4的第二端分别连接电容C3的第二端、光耦U2的阳极输入端、光耦U1的阴极输入端;光耦U1的发射极输出端、光耦U2的发射极输出端均接地;光耦U1的集电极输出端、光耦U2的集电极输出端分别连接信号处理模块以及驱动模块;光耦U1的集电极输出端的输出信号、光耦U2的集电极输出端的输出信号分别作为信号转换子模块的两路输出信号,分别发送给信号处理模块、驱动模块。
可选地,所述相序检测模块包括:电阻R1、电阻R5、电阻R10、电容C2、电容C7、电容C13、光耦OP1、光耦OP2、光耦OP3、电阻R3、电阻R8、电阻R12;其中:
所述电阻R3的第一端、电阻R8的第一端、电阻R12的第一端分别连接三相电源的三个电源输出端;电阻R3的第二端连接光耦OP1输入端一脚;电阻R8的第二端连接光耦OP2输入端一脚;电阻R12的第二端连接光耦OP3输入端一脚;光耦OP1输入端的另一脚、光耦OP2输入端的另一脚、光耦OP3输入端的另一脚连接在一起;
光耦OP1的发射极输出端、光耦OP2发射极输出端、光耦OP3发射极输出端、电容C2的第二端、电容C7的第二端、电容C13的第二端均接地;光耦OP1的集电极输出端分别连接信号处理模块、电阻R1的第一端、电容C2的第一端;电阻R1的第二端接5V电源;光耦OP2集电极输出端分别连接信号处理模块、电阻R5的第一端、电容C7的第一端;电阻R5的第二端接5V电源;光耦OP3集电极输出端分别连接信号处理模块、电阻R10的第一端、电容C13的第一端;电阻R10的第二端接5V电源;
所述光耦OP1集电极输出端、光耦OP2集电极输出端、光耦OP3集电极输出端分别连接信号处理模块;
所述光耦OP1集电极输出端的输出信号、光耦OP2集电极输出端的输出信号、光耦OP3集电极输出端的输出信号分别作为所述相序检测模块的三路输出信号,发送给信号处理模块。
可选地,所述光耦OP1、光耦OP2、光耦OP3均为交流输入型光耦。
可选地,所述信号处理模块包括:单片机IC3、电容C9、电阻R6;
所述单片机IC3设置有第一至第十四引脚;所述第二引脚和第三引脚分别接入所述信号转换子模块的两路输出信号;所述第五引脚至第七引脚分别接入所述相序检测模块的三路输出信号;第一引脚接5V电源;第四引脚分别连接电容C9的第一端、电阻R6的第一端;电容C9的第二端接地;电阻R6的第二端连接5V电源;第八引脚至第十一引脚连接所述驱动模块;
所述第八引脚至第十引脚的输出信号作为所述信号处理模块的三路输出信号发送给驱动模块;所述第八引脚至第九引脚输出电磁继电器的驱动信号,所述第十引脚输出可控硅的驱动使能信号。
可选地,所述信号处理模块还包括电阻RFSEL1,所述电阻RFSEL1的第一端连接所述单片机IC3的第十一引脚,其第二端接地。
可选地,所述驱动模块包括:电阻R33、电阻R34、电容C25、电容C26、异或门集成芯片IC7A、电阻R36、二极管D6、电容C24、异或门集成芯片IC7B、与门集成芯片IC6B、与门集成芯片IC6A、电阻R35、电阻R37、三极管Q7、异或门集成芯片IC5A、电阻R28、二极管D5、电容C22、异或门集成芯片IC5B、与门集成芯片IC4A、与门集成芯片IC4B、电阻R23、电阻R25、电阻R30、电阻R32、电阻R18、电阻R20、三极管Q2、三极管Q4、三极管Q6、电阻R16、电阻R17、电阻R27、电容C21、光耦OP4、光耦OP5、光耦OP6、光耦OP7、光耦OP8、光耦OP9;其中:
所述异或门集成芯片IC7A的两个输入端接入信号转换子模块的两路输出,其中一个输入端分别连接电阻R33的第一端、电容C25的第一端,另一个输入端分别连接电阻R34的第一端、电容C26的第一端;电阻R33的第二端、电阻R34的第二端均连接5V电源;异或门集成芯片IC7A的输出端分别连接电阻R36的第一端、二极管D6的阴极;电阻R36的第二端分别连接二极管D6的阳极、电容C24的第一端、异或门集成芯片IC7B的一个输入端;电容C24的第二端、异或门集成芯片IC7B的另一个输入端均接地;异或门集成芯片IC7B的输出端连接所述与门集成芯片IC6B的一个输入端;
单片机IC3的第八引脚、第九引脚分别连接所述异或门集成芯片IC5A的两个输入端;异或门集成芯片IC5A的一个输入端同时连接所述与门集成芯片IC4A的一个输入端,异或门集成芯片IC5A的另一个输入端同时连接所述与门集成芯片IC4B的一个输入端;异或门集成芯片IC5A的输出端分别连接电阻R28的第一端、二极管D5的阴极;电阻R28的第二端分别连接二极管D5的阳极、电容C22的第一端、异或门集成芯片IC5B的一个输入端;电容C22的第二端、异或门集成芯片IC5B的另一个输入端均接地;异或门集成芯片IC5B的输出端分别连接所述与门集成芯片IC6B的另一个输入端、与门集成芯片IC4B的另一个输入端、与门集成芯片IC4A的另一个输入端、电阻R18的第一端;电阻R18的第二端分别连接三极管Q2的基极、电阻R20的第一端,电阻R20的第二端、三极管Q2的发射极均接地,三极管Q2的集电极连接所述功率组件模块;
与门集成芯片IC4A的输出端连接电阻R23的第一端;电阻R23的第二端分别连接三极管Q4的基极、电阻R25的第一端,电阻R20的第二端、三极管Q4的发射极均接地,三极管Q4的集电极连接所述功率组件模块;
与门集成芯片IC4B的输出端连接电阻R30的第一端;电阻R30的第二端分别连接三极管Q6的基极、电阻R32的第一端,电阻R32的第二端、三极管Q6的发射极均接地,三极管Q6的集电极连接所述功率组件模块;
与门集成芯片IC6B的输出端连接所述与门集成芯片IC6A的一个输入端,与门集成芯片IC6A的另一个输入端连接所述单片机IC3的第十引脚;与门集成芯片IC6A的输出端连接电阻R35的第一端;电阻R35的第二端分别连接三极管Q7的基极、电阻R37的第一端,电阻R37的第二端、三极管Q7的发射极均接地,三极管Q7的集电极分别连接光耦OP9的阴极输入端、电容C21的第一端、电阻R27的第一端;电容C21的第二端分别连接电阻R27的第二端、光耦OP4的阳极输入端、电阻R16的第一端、电阻R17的第一端;电阻R16的第二端、电阻R17的第二端均连接12V电源;光耦OP4的阴极输入端连接光耦OP5的阳极输入端、光耦PO5的阴极输入端连接光耦OP6的阳极输入端、光耦OP6的阴极输入端连接光耦OP8的阳极输入端、光耦OP8的阴极输入端连接光耦OP9的阳极输入端;
光耦OP4的一个输出端、光耦OP5的一个输出端、光耦OP6的一个输出端、光耦OP7的一个输出端、光耦OP8的一个输出端、光耦OP9的一个输出端均连接所述功率组件模块;光耦OP4的另一个输出端连接光耦OP5的另一个输出端;光耦OP6的另一个输出端连接光耦OP7的另一个输出端;光耦OP8的另一个输出端连接光耦OP9的另一个输出端。
可选地,所述功率组件模块包括:电阻R14、电阻R19、可控硅Q1、电阻R15、电容C16、二极管D2、电阻R21、电阻R24、可控硅Q3、电阻R22、电容C20、二极管D3、电阻R26、电阻R31、可控硅Q5、电阻R29、电容C23、二极管D4、电磁继电器K1、电磁继电器K2、电磁继电器K3、电磁继电器K4、电磁继电器K5、二极管D7、二极管D8、二极管D9、二极管D10、二极管D11;其中:
电阻R14的第一端连接光耦OP4的第一输出端,电阻R14的第二端分别连接可控硅Q1的第一端子、电阻R15的第一端、二极管D2的第一端;电阻R21的第一端连接光耦OP6的第一输出端,电阻R21的第二端分别连接可控硅Q3的第一端子、电阻R22的第一端、二极管D3的第一端;电阻R26的第一端连接光耦OP8的第一输出端,电阻R26的第二端分别连接可控硅Q5的第一端子、电阻R29的第一端、二极管D4的第一端;且三相电源输出的三相电分别接入电阻R14的第二端、电阻R21的第二端、电阻R26的第二端;
电阻R19的第一端分别连接光耦OP5的第一输出端、可控硅Q1的控制端;电阻R19的第二端分别连接可控硅Q1的第二端子、电容C16的第一端、二极管D2的第二端、电磁继电器K1、电磁继电器K4;电容C16的第二端连接电阻R15的第二端;
电阻R24的第一端分别连接光耦OP7的第一输出端、可控硅Q3的控制端;电阻R24的第二端分别连接可控硅Q3的第二端子、电容C20的第一端、二极管D3的第二端、电磁继电器K2、电磁继电器K3;电容C20的第二端连接电阻R22的第二端;
电阻R31的第一端分别连接光耦OP9的第一输出端、可控硅Q5的控制端;电阻R31的第二端分别连接可控硅Q5的第二端子、电容C23的第一端、二极管D4的第二端、电磁继电器K5;电容C23的第二端连接电阻R29的第二端;
电磁继电器K1的动触点分别连接二极管D2的第二端、电磁继电器K4的常开触点;电磁继电器K1的常开触点分别连接三相电机的U相接线端、电磁继电器K2的动触点;电磁继电器K1的电源正极分别连接第二直流电源、二极管D7的阴极;电磁继电器K1的电源负极分别连接二极管D7的正极、三极管Q4的集电极;
电磁继电器K2的常开触点分别连接二极管D3的第二端、电磁继电器K3的动触点;电磁继电器K2的电源正极分别连接第二直流电源、二极管D8的阴极;电磁继电器K2的电源负极分别连接二极管D8的正极、三极管Q6的集电极;
电磁继电器K3的常开触点分别连接三相电机的V相接线端、电磁继电器K4的动触点;电磁继电器K3的电源正极分别连接第二直流电源、二极管D9的阴极;电磁继电器K3的电源负极分别连接二极管D9的正极、三极管Q4的集电极;
电磁继电器K4的常开触点分别连接二极管D2的第二端、电磁继电器K1的动触点;电磁继电器K4的电源正极分别连接第二直流电源、二极管D10的阴极;电磁继电器K4的电源负极分别连接二极管D10的正极、三极管Q6的集电极;
电磁继电器K5的动触点连接二极管D4的第二端,电磁继电器K5的常开触点连接三相电机W相接线端;电磁继电器K5的电源正极分别连接第二直流电源、二极管D11的阴极;电磁继电器K5的电源负极分别连接二极管D11的正极、三极管Q2的集电极。
与现有技术相比,本发明具有如下的有益效果:
1、本发明提供的三相正反转组合型固态继电器成本低、可靠性高。
2、本发明中最大的特点在于采用了电磁继电器和可控硅串联的功率控制电路,由电磁继电器担任换相,可控硅则负责主回路的通断。再合适的时序控制下,可以实现电磁继电器的无负载切换,消除了电磁继电器动作时的电弧,避免了因为电弧引起的强烈电磁骚扰和对触点的烧蚀,延长了电磁继电器的使用寿命。理论上电磁继电器的寿命能达到设计机械寿命,实验结果也表明寿命能达到电磁继电器的机械寿命。
3、本发明中的控制信号的输入方式采用了差分方式,对输入电路的抗干扰极为有利。并在输入端引入了π型滤波,更是加强了抗干扰能力。
4、本发明中因为加入了相序检测模块,可以给信号处理模块提供输入三相电的相序信号,在做很小的修改后(固化不同程序或者增加一个控制端口)就可以很方便的拓展出其他特有功能,比如缓启动功能(需要增加一个端口调整缓启动时间参数),缺相保护功能,相序校正功能,制动功能(需要增加一个端口调整制动时间参数)等。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
图1是现有的三相正反转固态继电器的基本功能框图;
图2是现有的实现功能的其中一种电路原理图。
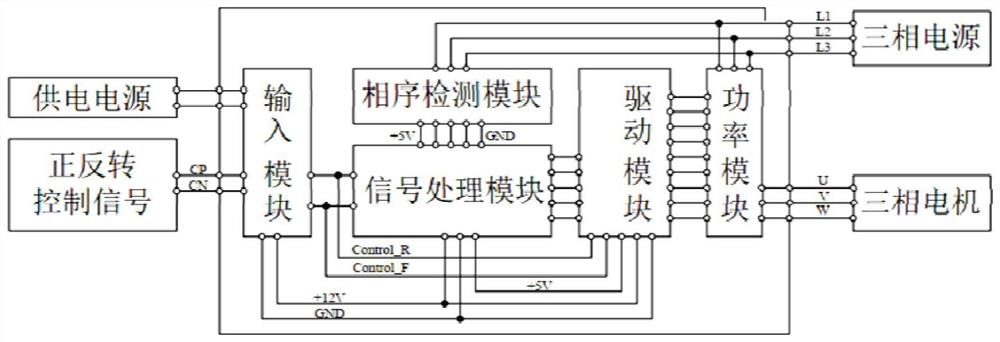
图3是本发明具体实施例一种三相正反转组合型固态继电器的电路框图;
图4是本发明具体实施例一种三相正反转组合型固态继电器的电路原理图;
图5是本发明具体实施例的输入模块原理图;
图6是本发明具体实施例的信号处理模块原理图;
图7是本发明具体实施例的相序检测模块原理图;
图8是本发明具体实施例的驱动模块原理图;
图9是本发明具体实施例的功率组件模块原理图。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
如图3和图4,本实施例提供了一种三相正反转组合型固态继电器,包括:输入模块、相序检测模块、信号处理模块、驱动模块、功率组件模块;
所述输入模块分别与信号处理模块、驱动模块连接;所述相序检测模块分别与三相电源和信号处理模块连接;所述信号处理模块分别与相序检测模块、输入模块、驱动模块连接;所述驱动模块分别与输入模块、功率组件模块连接;所述功率组件模块分别与驱动模块、三相电源、三相电机连接;其中:
所述输入模块,用于接入外部直流电源(这里称为第一直流电源),并将所述外部直流电源转换为所述继电器内部需要的直流电源(这里称为第二直流电源);并用于接入外部输入的两路初始控制信号,将所述两路初始控制信号进行处理后分别发送给信号处理模块、驱动模块。输入模块将所述第二直流电压源提供给信号处理模块和驱动模块。
其中,所述“两路初始控制信号”包括:第一路初始控制信号、第二路初始控制信号;当第一路初始控制信号为高,第二路初始控制信号为低时,三相电机正转;当第一路初始控制信号为低,第二路初始控制信号为高时,三相电机反转;当第一路初始控制信号与第二路初始控制信号的差分电压小于3V时,三相电机停止运行。
所述相序检测模块,用于接收三相电源提供的三相交流电,并将输入的三相交流电的过零点检测出来发送给所述信号处理模块;
所述信号处理模块,用于接收所述输入模块和相序检测模块发送的信号,并将这些信号进行处理后得到驱动信号发送给驱动模块;
所述驱动模块,用于接收所述信号处理模块发送的驱动信号,并对所述驱动信号进行处理后得到控制信号发送给功率组件模块;这里的“处理”包括:进行互锁延时并相与运算、信号放大以及光耦隔离。
所述功率组件模块,用于接收驱动模块发送的控制信号,并通过所述控制信号去控制三相电机的通断和相序切换。所述功率组件模块包括:电磁继电器和可控硅;所述可控硅用于控制三相电机的启停;所述电磁继电器用于控制三相电机的相序切换。
本实施例中,由供电电源提供第一直流电源,其为15-32V的直流电源;经输入模块转换后,第一直流电源被转换为第二直流电源,第二直流电源为12V直流电源。固态继电器内部的12V电源均由第二直流电源提供。
本实施例中,正反转控制信号即初始控制信号由两根线CP、CN提供。正转与反转控制方式也不同,正转与反转由两根线CP、CN来控制,没有公共端,属于差分控制方式。CP为高,CN为低时电机正转;CP为低,CN为高时,电机反转;CP、CN的差分电压小于3V时,电机停止运行。功率组件是由电磁继电器来执行输出相序的切换,可控硅来执行电机的启动和停止。在结合输入三相电源的相序检测模块,配套合适的控制程序,本实施例的固态继电器可以实现输入缺相保护、输入相序自动校正,电机缓启动,电机负载的制动等功能。
其中,所述输入模块包括:电源转换子模块、信号转换子模块;电源转换子模块,用于外部直流电源转换为所述继电器内部需要的直流电源;信号转换子模块,用于将所述两路初始控制信号进行处理后分别发送给信号处理模块、驱动模块。电源转换子模块将外部提供的15V-32V直流电压转换成内部需要12V电源,给信号处理模块、相序检测模块和驱动模块提供稳定的12V直流电源。电源转换子模块输入通过两个2.7Ω电阻和0.1uF电容组成的π型滤波电路后进入整流桥D1,再经过两个电容滤波后给开关电源芯片供电,经过开关电源芯片的调理得到稳定的12V电压给后续电路供电。信号转换子模块将外部两根控制信号经过两个5.1kΩ电阻和一个0.1uF电容组成的π型滤波电路后接入两个发光二极管端反并联的直流光耦隔离后输出,这样就保证了两个光耦只能是两个同时截止或者只有一个导通的状态,正常情况下不存在两个同时导通的状态,保证了送入后续电路的控制信号的正确性。电源转换子模块、信号转换子模块在输入端均有π型滤波电路,能极大减小瞬态差模干扰对内部电路的影响,提高模块的抗扰性;对共模干扰,可以采用在外部连线上增加磁环的方式或者串联共模抑制电感来解决。
如图5,所述电源转换子模块包括:电阻R7、电阻R13、电容C12、整流桥D1、电容C14、电容C15、开关电源芯片IC2、电感LL1、电容C8、电阻R9、电容C10、电容C11、电阻R11;其中:
所述电阻R7的第一端、电阻R13的第一端分别连接外部第一直流电源的两端;所述电阻R7的第二端分别连接电容C12的第一端、整流桥D1的一个输入端;电阻R13的第二端分别连接电容C12的第二端、整流桥D1的另一个输入端;
开关电源芯片IC2设置有第一至第六引脚;整流桥D1的负极接地、整流桥D1的正极连接电容C14的第一端、电容C15的第一端、开关电源芯片IC2的第四、第五引脚;电容C14的第二端、电容C15的第二端均接地;开关电源芯片IC2的第六引脚分别连接电容C8的第一端、电容LL1的第一端;开关电源芯片IC2的第一引脚连接电容C8的第二端;电感LL1的第二端、电阻R9的第一端、电容C10的第一端、电容C11的第一端连接在一起;电容C10的第二端、电容C11的第二端、开关电源芯片IC2的第二引脚均接地;开关电源芯片IC2的第三引脚分别连接电阻R9的第二端、电阻R11的第一端;电阻R11的第二端接地;所述电感LL1的第二端、开关电源芯片IC2的第二引脚作为第二直流电源的输出端;
所述信号转换子模块包括:电阻R2、电阻R4、电容C3、光耦U1、光耦U2;其中:
所述电阻R2的第一端、电阻R4的第一端分别接入外部输入的两个初始控制信号;电阻R2的第二端分别连接电容C3的第一端、光耦U1的阳极输入端、光耦U2的阴极输入端;电阻R4的第二端分别连接电容C3的第二端、光耦U2的阳极输入端、光耦U1的阴极输入端;光耦U1的发射极输出端、光耦U2的发射极输出端均接地;光耦U1的集电极输出端、光耦U2的集电极输出端分别连接信号处理模块以及驱动模块;光耦U1的集电极输出端的输出信号、光耦U2的集电极输出端的输出信号分别作为信号转换子模块的两路输出信号,分别发送给信号处理模块、驱动模块。
其中,相序检测模块主要由三颗交流输入型光耦(如PC814)构成,将输入三相电源的过零点检测出来送给信号处理模块进行处理。输入三相电分别通过360kΩ电阻限流后接入光耦输入端一脚,三颗光耦输入端的另外一脚连接在一起,光耦输出端的E极连接到电源地,C极通过10kΩ电阻上拉到5V电源后输出给信号处理模块,以便信号处理模块检测相序和得到基准时间点。C极还和电源地之间并联一个0.1uF电容以滤除尖峰脉冲。
如图7,所述相序检测模块包括:电阻R1、电阻R5、电阻R10、电容C2、电容C7、电容C13、光耦OP1、光耦OP2、光耦OP3、电阻R3、电阻R8、电阻R12;其中:
所述电阻R3的第一端、电阻R8的第一端、电阻R12的第一端分别连接三相电源的三个电源输出端;电阻R3的第二端连接光耦OP1输入端一脚;电阻R8的第二端连接光耦OP2输入端一脚;电阻R12的第二端连接光耦OP3输入端一脚;光耦OP1输入端的另一脚、光耦OP2输入端的另一脚、光耦OP3输入端的另一脚连接在一起;
光耦OP1的发射极输出端、光耦OP2发射极输出端、光耦OP3发射极输出端、电容C2的第二端、电容C7的第二端、电容C13的第二端均接地;光耦OP1的集电极输出端分别连接信号处理模块、电阻R1的第一端、电容C2的第一端;电阻R1的第二端接5V电源;光耦OP2集电极输出端分别连接信号处理模块、电阻R5的第一端、电容C7的第一端;电阻R5的第二端接5V电源;光耦OP3集电极输出端分别连接信号处理模块、电阻R10的第一端、电容C13的第一端;电阻R10的第二端接5V电源;
所述光耦OP1集电极输出端、光耦OP2集电极输出端、光耦OP3集电极输出端分别连接信号处理模块;
所述光耦OP1集电极输出端的输出信号、光耦OP2集电极输出端的输出信号、光耦OP3集电极输出端的输出信号分别作为所述相序检测模块的三路输出信号,发送给信号处理模块。其中,所述光耦OP1、光耦OP2、光耦OP3均为交流输入型光耦。
其中,信号处理模块主体由抗干扰能力强的单片机组成。模块时刻检测正反转控制信号Control_F、Control_R,三相电相序信号Phase_L1、Phase_L2、Phase_L3和功能选择信号Function_Sel,并根据信号的关系输出合适的电磁继电器驱动信号Relay_Control_F、Relay_Control_R和可控硅驱动使能信号SCR_Drive_EN。不焊接RFSEL1时,模块是具有特殊功能的(如输入缺相保护、缓启动、制动等功能,具体按客户需求定制)。当RFSEL1焊接后,模块只有简单的正反转功能。Control_F和Control_R全部为高电平时,模块处于待机状态,各输出信号全部为低电平;当Control_F变成低电平,经过大约20mS后,Relay_Controt_F输出高电平,再经过60mS后SCR_Drivr_EN输出高电平,在Conrot_F恢复高电平时,SCR_Drive_EN立即输出低电平,经过大约200mS后Relay_Control_F输出低电平;同样,当Control_R变成低电平,经过大约20mS后,Relay_Controt_R输出高电平,再经过60mS后SCR_Drive_EN输出高电平,在Control_R恢复高电平时SCR_Drive_EN立即输出低电平,经过大约200mS后Relay_Control_R输出低电平。这样的时序保证了在继电器动作的时候,回路中没有电流,达到了电磁继电器的无负载切换,消除电磁继电器动作时电弧的目的,电磁继电器的触点损耗也降到了最低,极大延长了电磁继电器的使用寿命。RFSEL1不焊接的情况本说明只对缺相保护功能和相序自动校正功能进行说明。如三相输入电源出现缺相异常,信号处理模块检测到该异常后会强制断开负载,以避免因为长期缺相运行时电机烧毁等事故发生,可以很好的起到保护作用。相序自动校正功能是如果输入的是Control_F为低电平,要求输出正相序,此时当输入三相电的相序是正相序时,信号处理模块会给出Relay_Control_F为高电平的信号,当输入三相电是逆相序时,信号处理模块会给出Relay_Control_R为高电平的信号,确保了输出都是正相序;同样的,如果输入的是Control_R为低电平,当输入三相电的相序是正相序时,信号处理模块会给出Relay_Control_R为高电平的信号,要求输出逆相序,当输入三相电是逆相序时,信号处理模块会给出Relay_Control_F为高电平的信号,这样就确保输出的都是逆相序,这样就实现了输出相序的自动校正功能。该功能可以使输入三相电的接线顺序对输出三相电的相序无关。
如图6,所述信号处理模块包括:单片机IC3、电容C9、电阻R6;
所述单片机IC3设置有第一至第十四引脚;所述第二引脚和第三引脚分别接入所述信号转换子模块的两路输出信号;所述第五引脚至第七引脚分别接入所述相序检测模块的三路输出信号;第一引脚接5V电源;第四引脚分别连接电容C9的第一端、电阻R6的第一端;电容C9的第二端接地;电阻R6的第二端连接5V电源;第八引脚至第十一引脚连接所述驱动模块;
所述第五引脚连接电阻R1的第一端;第六引脚连接电阻R5的第一端,第七引脚连接电阻R10的第一端。
所述第八引脚至第十引脚的输出信号作为所述信号处理模块的三路输出信号发送给驱动模块;所述第八引脚至第九引脚输出电磁继电器的驱动信号,所述第十引脚输出可控硅的驱动使能信号。
所述信号处理模块还包括:一电源子模块,用于接入第二直流电源,并将第二直流电源转换为所述继电器内部需要的第三直流电源;本实施例中,第三直流电源为5V直流电源。这里仅为具体,具体实施时,所述子模块也可以设置于输入模块中,直接在输入模块完成将第二直流电源转换为第三直流电源的工作,本发明不对其具体位置做出限定。
所述信号处理模块还包括电阻RFSEL1,所述电阻RFSEL1的第一端连接所述单片机IC3的第十一引脚,其第二端接地。
所述电源子模块包括:开关电源芯片IC1、电容C4、电容C5、电容C1、电容C6;所述开关电源芯片IC1设置有第一至第三引脚;第三引脚为输入端,分别连接第二直流电源、电容C4的第一端、电容C5的第一端;第一引脚接地;第二引脚为输出端,分别连接电容C1的第一端、电容C6的第一端,且第二引脚输出5V电源即第三直流电源;电容C4的第二端、电容C5第二端、电容C1第二端、电容C6第二端均接地。固态继电器内部的5V电源均由第三直流电源提供。
其中,驱动模块包含硬件互锁和延时功能。硬件的互锁和延时能确保整个模块的可靠工作,防止因为强干扰导致信号处理模块偶尔出错而给出的错误控制信号引起的产品失效,能极大提高产品可靠性。将Control_F和Control_R信号经过异或运算后,输出给一个约20mS的延时电路,再通过一个由异或电路构成的同向缓冲器,输出和电磁继电器驱动信号Relay_Control_F和Relay_Control_R的异或运算结果延时约20mS后的输出信号、可控硅驱动使能信号SCR_Drive_EN相与后输出驱动一个NPN型三极管,改三极管C极直接驱动六颗输入端串联后的光耦,得到六个输出Tri_L1_1、Tri_L1_2、Tri_L2_1、Tri_L2_2、Tri_L3_1、Tri_L3_2,分别驱动三颗可控硅实现电机的启停;相序控制信号Relay_Control_F和Relay_Control_R同样经过异或运算并经过20mS延时后送到一个由异或门组成的同向缓冲器,再分别和Relay_Control_F、Relay_Control_R相与后输出分别接两个NPN型三极管,得到经过延时互锁的两路电磁继电器换相信号Relay_Drive_F、Relay_Drive_R和一路公共直控相控制信号Relay_Drive_COM分别驱动5颗电磁继电器实现相序的切换。Relay_Drive_F、Relay_Drive_R、Relay_Drive_COM将直接驱动电磁继电器。
如图8,所述驱动模块包括:电阻R33、电阻R34、电容C25、电容C26、异或门集成芯片IC7A、电阻R36、二极管D6、电容C24、异或门集成芯片IC7B、与门集成芯片IC6B、与门集成芯片IC6A、电阻R35、电阻R37、三极管Q7、异或门集成芯片IC5A、电阻R28、二极管D5、电容C22、异或门集成芯片IC5B、与门集成芯片IC4A、与门集成芯片IC4B、电阻R23、电阻R25、电阻R30、电阻R32、电阻R18、电阻R20、三极管Q2、三极管Q4、三极管Q6、电阻R16、电阻R17、电阻R27、电容C21、光耦OP4、光耦OP5、光耦OP6、光耦OP7、光耦OP8、光耦OP9;光耦OP4、光耦OP5、光耦OP6、光耦OP7、光耦OP8、光耦OP9均为可控硅输出型光耦。其中:
所述异或门集成芯片IC7A的两个输入端接入信号转换子模块的两路输出,其中一个输入端分别连接电阻R33的第一端、电容C25的第一端,另一个输入端分别连接电阻R34的第一端、电容C26的第一端;电阻R33的第二端、电阻R34的第二端均连接5V电源;异或门集成芯片IC7A的输出端分别连接电阻R36的第一端、二极管D6的阴极;电阻R36的第二端分别连接二极管D6的阳极、电容C24的第一端、异或门集成芯片IC7B的一个输入端;电容C24的第二端、异或门集成芯片IC7B的另一个输入端均接地;异或门集成芯片IC7B的输出端连接所述与门集成芯片IC6B的一个输入端;
单片机IC3的第八引脚、第九引脚分别连接所述异或门集成芯片IC5A的两个输入端;异或门集成芯片IC5A的一个输入端同时连接所述与门集成芯片IC4A的一个输入端,异或门集成芯片IC5A的另一个输入端同时连接所述与门集成芯片IC4B的一个输入端;异或门集成芯片IC5A的输出端分别连接电阻R28的第一端、二极管D5的阴极;电阻R28的第二端分别连接二极管D5的阳极、电容C22的第一端、异或门集成芯片IC5B的一个输入端;电容C22的第二端、异或门集成芯片IC5B的另一个输入端均接地;异或门集成芯片IC5B的输出端分别连接所述与门集成芯片IC6B的另一个输入端、与门集成芯片IC4B的另一个输入端、与门集成芯片IC4A的另一个输入端、电阻R18的第一端;电阻R18的第二端分别连接三极管Q2的基极、电阻R20的第一端,电阻R20的第二端、三极管Q2的发射极均接地,三极管Q2的集电极连接所述功率组件模块;
与门集成芯片IC4A的输出端连接电阻R23的第一端;电阻R23的第二端分别连接三极管Q4的基极、电阻R25的第一端,电阻R20的第二端、三极管Q4的发射极均接地,三极管Q4的集电极连接所述功率组件模块;
与门集成芯片IC4B的输出端连接电阻R30的第一端;电阻R30的第二端分别连接三极管Q6的基极、电阻R32的第一端,电阻R32的第二端、三极管Q6的发射极均接地,三极管Q6的集电极连接所述功率组件模块;
与门集成芯片IC6B的输出端连接所述与门集成芯片IC6A的一个输入端,与门集成芯片IC6A的另一个输入端连接所述单片机IC3的第十引脚;与门集成芯片IC6A的输出端连接电阻R35的第一端;电阻R35的第二端分别连接三极管Q7的基极、电阻R37的第一端,电阻R37的第二端、三极管Q7的发射极均接地,三极管Q7的集电极分别连接光耦OP9的阴极输入端、电容C21的第一端、电阻R27的第一端;电容C21的第二端分别连接电阻R27的第二端、光耦OP4的阳极输入端、电阻R16的第一端、电阻R17的第一端;电阻R16的第二端、电阻R17的第二端均连接12V电源;光耦OP4的阴极输入端连接光耦OP5的阳极输入端、光耦PO5的阴极输入端连接光耦OP6的阳极输入端、光耦OP6的阴极输入端连接光耦OP8的阳极输入端、光耦OP8的阴极输入端连接光耦OP9的阳极输入端;
光耦OP4的一个输出端、光耦OP5的一个输出端、光耦OP6的一个输出端、光耦OP7的一个输出端、光耦OP8的一个输出端、光耦OP9的一个输出端均连接所述功率组件模块;光耦OP4的另一个输出端连接光耦OP5的另一个输出端;
光耦OP6的另一个输出端连接光耦OP7的另一个输出端;光耦OP8的另一个输出端连接光耦OP9的另一个输出端。
所述驱动模块还包括:电容C17、C18、C19;所述电容C17的第一端、C18的第一端均接5V电源,所述电容C17的第二端、C18的第二端均接地;所述电容C19的第一端接12V电源,第二端接地。这三个电容作为驱动模块的电源滤波电容。
其中,功率组件模块由可控硅和电磁继电器组成。可控硅负责电机启停,电磁继电器负责相序切换。输入三相电L1、L2、L3先分别接入三路可控硅开关,再接入电磁继电器换相部分,最后连接到U、V、W接入三相电机。电磁继电器驱动信号Relay_Drive_F、Relay_Drive_R、Relay_Drive_COM经过驱动模块后只有三种情况:全无效,Relay_Drive_F、Relay_Drive_COM有效,Relay_Drive_R、Relay_Drive_COM有效,分别对应了输出断开、换相和不换相三种状态。当Relay_Drive_F、Relay_Drive_R、Relay_Drive_COM全无效时,U、V、W与L1_OUT、L2_OUT、L3_OUT断开,电机不动作;Relay_Drive_F、Relay_Drive_COM有效时,电磁继电器K1、K3、K5动作,U连通L2_OUT,V连通L1_OUT,W连通L3_OUT,可控硅接通后,得到下面的输出关系:L2→U,L1→V,L3→W。Relay_Drive_R、Relay_Drive_COM有效时,电磁继电器K2、K4、K5动作,U连通L1_OUT,V连通L2_OUT,W连通L3_OUT,可控硅接通后,得到下面的输出关系:L1→U,L2→V,L3→W。这样在U、V、W得到了不同的相序。
如图9,所述功率组件模块包括:电阻R14、电阻R19、可控硅Q1、电阻R15、电容C16、二极管D2、电阻R21、电阻R24、可控硅Q3、电阻R22、电容C20、二极管D3、电阻R26、电阻R31、可控硅Q5、电阻R29、电容C23、二极管D4、电磁继电器K1、电磁继电器K2、电磁继电器K3、电磁继电器K4、电磁继电器K5、二极管D7、二极管D8、二极管D9、二极管D10、二极管D11;其中:
电阻R14的第一端连接光耦OP4的第一输出端,电阻R14的第二端分别连接可控硅Q1的第一端子、电阻R15的第一端、二极管D2的第一端;电阻R21的第一端连接光耦OP6的第一输出端,电阻R21的第二端分别连接可控硅Q3的第一端子、电阻R22的第一端、二极管D3的第一端;电阻R26的第一端连接光耦OP8的第一输出端,电阻R26的第二端分别连接可控硅Q5的第一端子、电阻R29的第一端、二极管D4的第一端;且三相电源输出的三相电分别接入电阻R14的第二端、电阻R21的第二端、电阻R26的第二端;
电阻R19的第一端分别连接光耦OP5的第一输出端、可控硅Q1的控制端;电阻R19的第二端分别连接可控硅Q1的第二端子、电容C16的第一端、二极管D2的第二端、电磁继电器K1、电磁继电器K4;电容C16的第二端连接电阻R15的第二端;
电阻R24的第一端分别连接光耦OP7的第一输出端、可控硅Q3的控制端;电阻R24的第二端分别连接可控硅Q3的第二端子、电容C20的第一端、二极管D3的第二端、电磁继电器K2、电磁继电器K3;电容C20的第二端连接电阻R22的第二端;
电阻R31的第一端分别连接光耦OP9的第一输出端、可控硅Q5的控制端;电阻R31的第二端分别连接可控硅Q5的第二端子、电容C23的第一端、二极管D4的第二端、电磁继电器K5;电容C23的第二端连接电阻R29的第二端;
电磁继电器K1的动触点分别连接二极管D2的第二端、电磁继电器K4的常开触点;电磁继电器K1的常开触点分别连接三相电机的U相接线端、电磁继电器K2的动触点;电磁继电器K1的电源正极分别连接第二直流电源、二极管D7的阴极;电磁继电器K1的电源负极分别连接二极管D7的正极、三极管Q4的集电极;
电磁继电器K2的常开触点分别连接二极管D3的第二端、电磁继电器K3的动触点;电磁继电器K2的电源正极分别连接第二直流电源、二极管D8的阴极;电磁继电器K2的电源负极分别连接二极管D8的正极、三极管Q6的集电极;
电磁继电器K3的常开触点分别连接三相电机的V相接线端、电磁继电器K4的动触点;电磁继电器K3的电源正极分别连接第二直流电源、二极管D9的阴极;电磁继电器K3的电源负极分别连接二极管D9的正极、三极管Q4的集电极;
电磁继电器K4的常开触点分别连接二极管D2的第二端、电磁继电器K1的动触点;电磁继电器K4的电源正极分别连接第二直流电源、二极管D10的阴极;电磁继电器K4的电源负极分别连接二极管D10的正极、三极管Q6的集电极;
电磁继电器K5的动触点连接二极管D4的第二端,电磁继电器K5的常开触点连接三相电机W相接线端;电磁继电器K5的电源正极分别连接第二直流电源、二极管D11的阴极;电磁继电器K5的电源负极分别连接二极管D11的正极、三极管Q2的集电极。
二极管D2、D3、D4均为双向瞬态抑制二极管。
J1、J2、J3、J4均为电路中常用的信号接入插件。
本实施例的固态继电器工作时,如需要接通电机,先由电磁继电器来控制相序的切换,延迟一段时间后(一般在20mS-60mS,因为要确保大于电磁继电器的动作时间,不能小于10mS,可以大于60mS,可以视产品需求的延时接通的时间来确定。)再由可控硅来接通三相电;如需控制电机停转,先断开可控硅,再经过大约200mS后,待电机产生的感生电压降低后再断开电磁继电器。这样就实现了电磁继电器的零电流接通和分断,极大延长电磁继电器的使用寿命,同时因为硬件互锁和延时电路的存在也提高了电路工作的可靠性。因为使用了电磁继电器来换相,就可以使用普通的低成本光耦和价格较低的双向可控硅,这样在不降低产品可靠性的前提下,实现了低成本,解决了目前三相正反转固态继电器的难题。
另外,方案加入一个功能选择电阻RFSEL,可以根据情况确定这可电阻是否焊接来选择模块是否具有别的特殊的功能。
本实施例提供的固态继电器为低成本、高可靠性的小功率(不大于3kW)固态继电器,其具有接通前延时、断开后延时、互锁功能的三相正反转组合式固态继电器。在必要的时候,可以选择增加缓启动、输入三相电缺相保护、输入三相电相序自动校正和能耗制动功能。后续几种功能都不需要增加硬件元件,只需烧写不同的控制程序就可以实现,极大的拓展了产品的灵活性。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。