晶圆缺陷检测设备
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及晶圆缺陷检测领域,尤其涉及一种高速晶圆检测设备。
背景技术
随着半导体制造技术的飞速发展,半导体器件为了达到更快的运算速度、更大的存储量以及更多的功能,半导体芯片向更高集成度方向发展;而半导体芯片的集成度越高,则半导体器件的临界尺寸(CD,Critical Dimension)越小。
光刻是半导体集成制作中最重要的工艺,集成电路制作时需要进行多层工艺,每一层都要准确对准,因此为了让各层光刻之间的图案的叠放能够准确无误,在显影工艺完成后必须对芯片进行显影后检查(After Develop Inspection,ADI),显影后检查可以发现光刻制程中的错误并及时纠正,这是芯片制造过程中少有的可以纠正的步骤之一。一旦形成有缺陷的光刻胶的晶圆被送到下一个图形形成的步骤(刻蚀),极易带来晶圆的报废。具体的,显影后检查一般包括对光刻胶的覆盖、对准、曝光、显影等一一进行检查,并判断光刻胶性能是否满足工艺的要求。
现有的显影后检查通过检测设备进行,具体在检测设备上的通过光学放大镜扫描式来检测,现有的这种检测和扫描方式检测效率较低,单位时间输出低,数据处理相对滞后,并且光学放大镜扫描式的方法,设备需要配置较大的放大镜以及较大的载物台和载物台驱动装置,使得检测设备占地面积大,成本贵。
发明内容
本发明所要解决的技术问题是怎样提高缺陷检测的效率,减小检测设备占据的面积。
本发明提供了一种晶圆缺陷检测设备,包括:
晶圆载台,用于固定待检测晶圆;
图像获取模块,所述图像获取模块包括第一晶圆,所述第一晶圆包括相对的第一表面和第二表面,所述第一表面形成有图像传感器阵列,所述图像获取模块通过图像传感器阵列进行一次拍摄获得所述待检测晶圆整个表面对应的检测图像;
缺陷判断模块,所述缺陷判断模块根据所述图像获取模块获得的检测图像,判断所述待检测晶圆的表面是否存在缺陷。
可选的,所述图像传感器阵列通过半导体集成制作工艺形成在所述第一晶圆中,所述图像传感器阵列包括若干图像传感器,若干图像传感器呈行列排布的分布在所述第一晶圆中。
可选的,所述图像获取模块还包括第二晶圆,所述第二晶圆与所述第一晶圆的第二表面键合连接,所述第二晶圆中形成有若干信号处理电路,所述若干信号处理电路用于对若干图像传感器同一次拍摄中对应获得的若干图像进行图像处理获得所述待检测晶圆整个表面对应的检测图像。
可选的,所述图像处理包括图像的拼接,所述图像的拼接包括图像预处理步骤、图像配准步骤、建立变化模型步骤、同一坐标变化步骤和融合重构步骤。
可选的,所述图像处理还包括图像的灰度处理、图像清晰度处理、多张离焦图像的合成处理中的一种或几种。
可选的,所述图像传感器还包括滤光片层和位于滤光片上的若干微透镜。
可选的,所述图像传感器阵列还包括位于所述第一晶圆的第一表面上设置的与若干图像传感器对应的镜头组件阵列。
可选的,所述图像传感器阵列的尺寸与所述待检测晶圆的尺寸对应。
可选的,所述缺陷判断模块包括标准单元和比较单元,所述标准单元中存储有标准晶圆图像或者无缺陷晶圆图像,所述比较单元用于将图像获取模块获得的检测图像与标准晶圆图像或者无缺陷晶圆图像进行比较或匹配,进而判断检测图像上是否存在缺陷以及缺陷的位置;所述缺陷判断模块还在进行缺陷判断的过程中,进行学习,获得缺陷的种类。
可选的,所述晶圆载台可以旋转、垂直方向移动、水平方向移动、偏转。
与现有技术相比,本发明技术方案具有以下优点:
本发明的晶圆缺陷检测设备,包括:晶圆载台,用于固定待检测晶圆;图像获取模块,所述图像获取模块包括第一晶圆,所述第一晶圆包括相对的第一表面和第二表面,所述第一表面形成有图像传感器阵列,所述图像获取模块通过图像传感器阵列进行一次拍摄获得所述待检测晶圆整个表面对应的检测图像;缺陷判断模块,所述缺陷判断模块根据所述图像获取模块获得的检测图像,判断所述待检测晶圆的表面是否存在缺陷。由于所述图像获取模块包括第一晶圆,所述第一晶圆中形成有图像传感器阵列,因而图像传感器阵列中相邻的图像传感器之间的位置是固定不变的,从而在图像获取模块通过图像传感器阵列获取待检测晶圆整个表面的检测图像时,相邻的图像传感器之间的前后左右位置以及高度位置无需进行校准,简化的晶圆缺陷检测设备的操作流程,并且无需额外设置辅助的校准结构因而能简化图像获取模块的结构,减小图像获取模块的体积。此外,由于第一晶圆的一整块晶圆都是用于形成图像传感器阵列,因而无需像现有的集成电路制作晶圆需要设置切割道,后续还要将晶圆进行分割单个的芯片,因而第一晶圆上可以有更多的空间用于形成图像传感器以及与图像传感器连接的功能电路。
并且,所述图像获取模块通过图像传感器阵列进行一次拍摄获得待检测晶圆整个表面对应的检测图像,因而在进行检测图像的获取时所述晶圆载台无需进行扫描移动(沿水平方向移动),并且本申请中所述晶圆载台仅需在与图像传感器阵列进行对准时沿垂直方向和/或沿水平方向小范围或小距离移动,因而晶圆载台和相应的驱动单元或驱动装置体积可以较小,加上图像传感器阵列占据的体积也较小,进而减小整个晶圆缺陷检测设备占据的体积,并能减少能耗(驱动体积小减少能耗)。并且本申请中,待检测晶圆整个表面对应的检测图像获取是通过图像获取模块通过图像传感器阵列进行一次拍摄获得,所述缺陷判断模块根据图像获取模块获得的检测图像,判断待检测晶圆的表面是否存在缺陷,在进行缺陷检测时,检测图像获取的时间极大的减少(一次瞬态成像),提高了缺陷检测的效率,降低成本(图像传感器阵列相比于光学扫描放大镜的成本大幅减小)。
进一步,所述图像传感器阵列中每一个图像传感器的尺寸相同,以使得在进行缺陷检测时,所述图像获取模块中的图像传感器阵列可以对待检测晶圆进行快速聚焦以及快速拍摄,并便于将若干图像传感器获得的图像进行拼接。
进一步,所述第一晶圆形成有图像传感器阵列的一侧表面上还形成有滤光片层和位于滤光片上的若干微透镜。所述滤光片可以滤除不需要的光线。所述微透镜用于在进行测量时,将待检测晶圆表面反射的光线汇聚到对应的图像传感器。
进一步,所述第一晶圆形成有图像传感器阵列的一侧表面上还设置有与图像传感器阵列对应的镜头组件阵列,从而可以对图像传感器阵列中对应的图像传感器的焦距和放大倍率进行调节。
附图说明
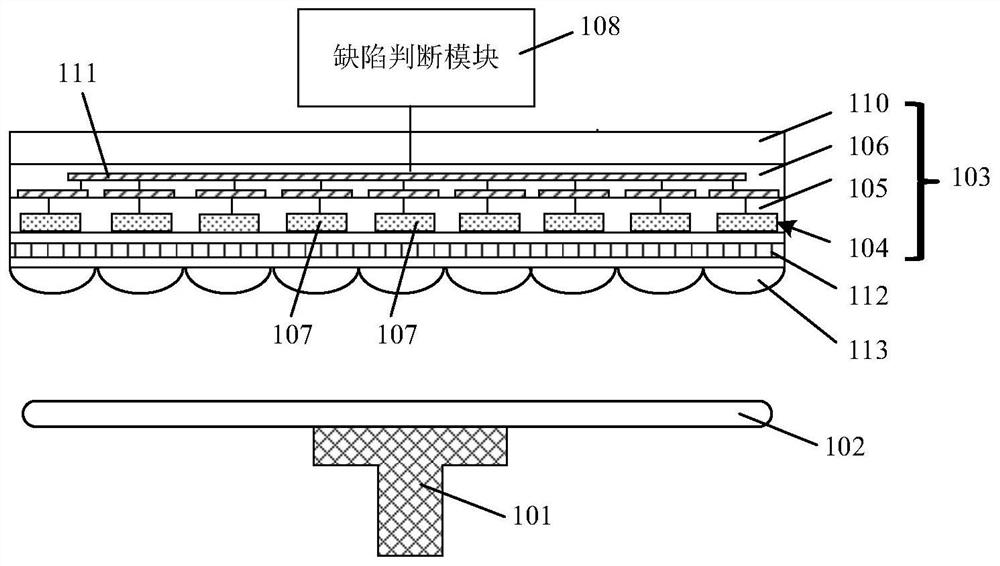
图1为本发明一实施例中晶圆缺陷检测设备的结构示意图;
图2为本发明一实施例中图像获取模块的俯视结构示意图;
图3为本发明另一实施例中晶圆缺陷检测设备的结构示意图。
具体实施方式
本发明提供了一种晶圆缺陷检测设备,包括:本发明的晶圆缺陷检测设备,包括:晶圆载台,用于固定待检测晶圆;图像获取模块,所述图像获取模块包括第一晶圆,所述第一晶圆包括相对的第一表面和第二表面,所述第一表面形成有图像传感器阵列,所述图像获取模块通过图像传感器阵列进行一次拍摄获得所述待检测晶圆整个表面对应的检测图像;缺陷判断模块,所述缺陷判断模块根据所述图像获取模块获得的检测图像,判断所述待检测晶圆的表面是否存在缺陷。由于所述图像获取模块包括第一晶圆,所述第一晶圆中形成有图像传感器阵列,因而图像传感器阵列中相邻的图像传感器之间的位置是固定不变的,从而在图像获取模块通过图像传感器阵列获取待检测晶圆整个表面的检测图像时,相邻的图像传感器之间的前后左右位置以及高度位置无需进行校准,简化晶圆缺陷检测设备的操作流程,并且无需额外设置辅助的校准结构因而能简化图像获取模块的结构,减小图像获取模块的体积。此外,由于第一晶圆的一整块晶圆都是用于形成图像传感器阵列,因而无需像现有的集成电路制作晶圆需要设置切割道,后续还要将晶圆进行分割单个的芯片,因而第一晶圆上可以有更多的空间用于形成图像传感器以及与图像传感器连接的功能电路。并且,可以减小整个晶圆缺陷检测设备占据的体积,并能减少能耗(驱动体积小减少能耗)以及提高了缺陷检测的效率,降低成本(图像传感器阵列相比于光学扫描放大镜的成本大幅减小)。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在详述本发明实施例时,为便于说明,示意图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本发明的保护范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
本发明一实施例提供了一种晶圆缺陷检测设备,请参考图1和图2,所述图2为图像获取模块的俯视结构示意图,包括:
晶圆载台101,用于固定待检测晶圆102;
图像获取模块103,所述图像获取模块103包括第一晶圆105,所述第一晶圆105包括相对的第一表面和第二表面,所述第一表面形成有图像传感器阵列104,所述图像获取模块103通过图像传感器阵列104进行一次拍摄获得所述待检测晶圆102整个表面对应的检测图像;
缺陷判断模块108,所述缺陷判断模块108根据所述图像获取模块103获得的检测图像,判断所述待检测晶圆102的表面是否存在缺陷。
具体的,所述晶圆载台101用于固定待检测晶圆102,所述晶圆载台101具体可以通过真空吸附、静电吸附或者机械加持的方式固定所述待检测晶圆102。具体的,所述晶圆缺陷检测设备还包括传送单元,所述传送单元用于将待检测晶圆102传送到所述晶圆载台101上,然后进行缺陷的检测。
在一实施例中,所述晶圆载台101可以移动,具体的,在进行检测图像拍摄前所述晶圆载台101可以旋转、并能沿垂直方向移动和/或沿水平方向小范围或小距离的移动(具体的所述小范围或小距离移动范围为正负10-25毫米),以使得晶圆载台101上的待检测晶圆102于所述图像获取模块103上的图像传感器阵列进行对准,所述晶圆载台101还可以在进行检测图像的拍摄时偏转使得待检测晶圆处于倾斜状态,以获得暗场图像。在具体的实施例中,所述晶圆载台101可以与相应的驱动单元或驱动装置连接,所述驱动单元或驱动装置可以驱动所述晶圆载台进行相应的动作(包括旋转、沿垂直方向小范围的移动、沿水平方向小范围的移动以及偏转),具体的所述驱动单元或驱动装置可以为微电机与微机械的结合。
所述待检测晶圆102为进行某一特定半导体工艺后的需要进行缺陷检测的晶圆。具体的,所述待检测晶圆102可以为进行光刻涂胶工艺后的晶圆,光刻显影工艺后的晶圆,刻蚀工艺(包括湿法刻蚀或干法刻蚀)后的晶圆,化学机械研磨工艺后的晶圆,化学气相沉积工艺后的晶圆,物理气相沉积后的晶圆。所述待检测晶圆102的材料可以为硅(Si)、锗(Ge)、或硅锗(GeSi)、碳化硅(SiC);也可以是绝缘体上硅(SOI),绝缘体上锗(GOI);或者还可以为其它的材料,例如砷化镓等Ⅲ-Ⅴ族化合物。所述待检测晶圆102的尺寸(直径)可以为6寸,8寸,12寸或18寸。
本申请中,后续对待检测晶圆102上的缺陷检测包括:检测所述待检测晶圆102表面上的形成的图形是否良好(比如图形是否完整,图形是否存在缺陷)、检测所述待检测晶圆102表面形成的膜层是否良好(比如膜层的表面形貌是否良好)、以及检测所述待检测晶圆102表面上是否存在颗粒缺陷、擦伤缺陷或者其他类型的缺陷。具体的,比如进行光刻显影工艺后对待检测晶圆102进行的显影后缺陷检测(ADI,After DevelopmentInspection),具体包括:检测显影后的光刻胶图形是否良好,所述光刻胶图形包括作为后续刻蚀掩膜的光刻胶图形、用于测量特征尺寸(CD)的光刻胶图形、用于测量套刻误差(overlay)的光刻胶图形,以及检查是否存在颗粒缺陷、擦伤缺陷或者其他类型的光刻胶缺陷。又比如,进行刻蚀工艺后对待检测晶圆进行的刻蚀后缺陷检测(AEI,After EtchInspection),具体包括:检测刻蚀图形是否良好,检测是否存在颗粒缺陷、擦伤缺陷或者其他类型的刻蚀缺陷。
所述图像获取模块103包括第一晶圆105,所述第一晶圆105中形成有图像传感器阵列104。所述图像传感器阵列104包括若干图像传感器107,若干图像传感器107呈行列排布的分布在所述第一晶圆105中(参考图2)。
所述第一晶圆105的材料可以为硅(Si)、锗(Ge)、或硅锗(GeSi)、碳化硅(SiC);也可以是绝缘体上硅(SOI),绝缘体上锗(GOI);或者还可以为其它的材料,例如砷化镓等Ⅲ-Ⅴ族化合物。本实施例中,所述第一晶圆105为硅晶圆。
所述图像传感器阵列104(或若干图像传感器107)通过半导体集成制作工艺形成在所述第一晶圆105中,因而图像传感器阵列104中相邻的图像传感器107之间的位置是固定不变的,从而在图像获取模块103通过图像传感器阵列104获取待检测晶圆102整个表面的检测图像时,相邻的图像传感器107之间的前后左右位置以及高度位置无需进行校准,简化的晶圆缺陷检测设备的操作流程,并且无需额外设置辅助的校准结构因而能简化图像获取模块103的结构,减小图像获取模块103的体积。此外,由于第一晶圆105的一整块晶圆都是用于形成图像传感器阵列104,因而无需像现有的集成电路制作晶圆需要设置切割道,后续还要将晶圆进行分割单个的芯片,因而第一晶圆105上可以有更多的空间用于形成图像传感器107以及与图像传感器107连接的功能电路。
在一实施例中,每一个所述图像传感器107均包括位于第一晶圆中的呈行列排布的若干感光区,所述感光区用于感测外部的入射的光线产生电信号。
在一实施例中,所述第一晶圆105中的若干图像传感器107为CMOS图像传感器。
本实施例中,所述图像传感器阵列104的尺寸与所述待检测晶圆102的尺寸对应,即所述图像传感器阵列104的尺寸与所述待检测晶圆102的尺寸相等、大致相等、略大于或者略小于均可以,只需要满足所述图像传感器阵列104中所述图像传感器107加起来的视角能覆盖所述待检测晶圆102的整个表面就可以。
在一实施例中,所述图像传感器阵列104中图像传感器107的数量大于等于5个,具体可以为5个(具体排布方式可以为在所述第一晶圆105中间设置1个图像传感器,在四周边缘分别设置一个图像传感器),9个(具体排布方式可以为在第一晶圆105上呈3x3阵列排布9个图像传感器),13个(具体排布方式可以为在第一晶圆105中间呈3x 3阵列排布9个图像传感器,在四周边缘各排布1个图像传感器),24个(具体排布方式可以为在第一晶圆105中间呈4x 4阵列排布16个图像传感器,在四周边缘各排布2个图像传感器),37个(具体排布方式可以为在第一晶圆105中间呈5x 5阵列排布25个图像传感器,在四周边缘各排布3个图像传感器),69个(具体排布方式可以为在第一晶圆105中间呈7x 7阵列排布49个图像传感器,在四周边缘各排布5个图像传感器)。需要说明的是,所述图像传感器阵列104中图像传感器107的数量还可以为其他的数量,具体的数量可以根据待检测晶圆102的尺寸,图像的清晰度以及检测的精度等需求进行设定,只需要满足所述图像传感器阵列104中所述图像传感器加起来的视角能覆盖所述待检测晶圆102的整个表面就可以。
在一实施例中,继续参考图1和图2,所述图像传感器阵列104中每一个图像传感器107的尺寸相同,以使得在进行缺陷检测时,所述图像获取模块103中的图像传感器阵列104可以对待检测晶圆102进行快速聚焦以及快速拍摄,并便于将若干图像传感器107获得的图像进行拼接。
本实施例中,所述图像获取模块103还包括第二晶圆106,所述第二晶圆106与所述第一晶圆105第二表面键合连接,所述第二晶圆106中形成有若干信号处理电路111,所述若干信号处理电路111用于对若干图像传感器107同一次拍摄中对应获得的若干图像进行图像处理获得所述待检测晶圆102整个表面对应的检测图像。所述图像获取模块103还包括将第一晶圆105和第二晶圆106塑封的塑封层110。在其他实施例中,所述若干信号处理电路也可以形成在所述第一晶圆105上。
所述图像处理包括图像的拼接,图像的拼接用于将图像传感器107同一次拍摄中对应获得的若干图像进行拼接获得所述待检测晶圆102整个表面对应的检测图像。在一实施例中,所述图像的拼接包括图像预处理步骤、图像配准步骤、建立变化模型步骤、同一坐标变化步骤和融合重构步骤。
具体的,所述图像预处理步骤,包括数字图像处理的基本操作(如去噪、边缘提取、直方图处理等)、建立图像的匹配模板以及对图像进行某种变换(如傅里叶变换、小波变换等)等操作。
所述图像配准步骤,就是采用一定的匹配策略或算法,找出待拼接图像中的模板或特征点在参考图像中对应的位置,进而确定两幅图像之间的变换关系。
在一实施例中,所述图像配准采用的算法可以采用基于频域的方法(相位相关方法)和基于时域的方法。其中,基于时域的方法又可具体分为基于特征的方法和基于区域的方法。基于特征的方法首先找出两幅图像中的特征点(如边界点、拐点、角点),并确定图像间特征点的对应关系,然后利用这种对应关系找到两幅图像间的变换关系,这一类方法不直接利用图像的灰度信息,因而对光线变化不敏感,但对特征点对应关系的精确程度依赖很大。基于区域的方法是以一幅图像重叠区域中的一块作为模板,在另一幅图像中搜索与此模板最相似的匹配块,这种算法精度较高。
所述建立变换模型步骤,根据模板或者图像特征之间的对应关系,计算出数学模型中的各参数值,从而建立两幅图像的数学变换模型。
所述统一坐标变换步骤,根据建立的数学转换模型,将待拼接图像转换到参考图像的坐标系中,完成统一坐标变换。
所述融合重构步骤,将待拼接图像的重合区域进行融合得到拼接重构的平滑无缝全景图像。
在其他的实施例中,所述图形处理还可以包括图像的灰度处理、图像清晰度处理、多张离焦图像的合成处理中的一种或几种。
在一实施例中,所述图像传感器107还包括的滤光片层112和位于滤光片112上的若干微透镜113。所述滤光片112可以为彩色滤光片,以滤除不需要的光线。所述微透镜用于在进行测量时,将待检测晶圆102表面反射的光线汇聚到对应的图像传感器107中。
在一实施例中,所述图像传感器阵列104还包括位于第一晶圆105第一表面上设置的与若干图像传感器107对应的镜头组件阵列(图中未示出),具体的可以每一个图像传感器107上对应设置一个镜头组件,或者相邻的多个(≥2个)图像传感器107上设置一个镜头组件(比如相邻的两个图像传感器107上设置一个镜头组件,或者相邻的三个图像传感器107上设置一个镜头组件,或者相邻的四个图像传感器107上设置一个镜头组件),以可以对图像传感器阵列104相应的图像传感器107的焦距和放大倍率进行调节。
在一实施例中,采用前述的图像传感器阵列104进行一次拍摄时,图像传感器阵列104中的所有图像传感器107采用同一倍率进行拍摄,所述信号处理电路进行图像处理时将所述图像传感器阵列104中的所有图像传感器107在同一倍率下获得的若干图像进行拼接获得待检测晶圆整个表面对应的检测图像。
在另一实施例中,在进行检测时,所述图像传感器阵列104中的若干图像传感器107可以先采用同一倍率(第一倍率)进行拍摄,获得若干第一检测图像时,所述信号处理电路进行图像处理时将所述若干第一检测图像进行拼接获得待检测晶圆整个表面对应的检测图像;然后图像传感器阵列104中的部分图像传感器107可以先采用放大倍率(第二倍率)进行拍摄,获得第二检测图像。因而在进行缺陷检测时,较小倍率下可以进行一般缺陷的检测,较大倍率时可以对待检测晶圆上的个别位置获得更大倍率和清晰的图像,以满足不同的检测需求(比如特征尺寸(CD)测量和套刻误差(overlay)测量),具体的,可以对用于测量特征尺寸(CD)的光刻胶图形进行检测并获得具体的特征尺寸值、还可以对用于测量套刻误差(overlay)的光刻胶图形进行检测并获得具体的套刻误差值、或者还可以用于获得特定位置更大倍率和清晰的图像以供工艺和设备人员进行观察,即采用本申请的缺陷检测设备既可以进行一般缺陷的快速检测,还可以用于套刻误差和特征尺寸值的快速测量,提高了集成电路制作工艺中缺陷的检测效率以及相关参数的测量效率,节省整个集成电路制程需要的时间。
在具体的实施例中,在采用图像传感器阵列104进行拍摄获取待检测晶圆整个表面对应的检测图像前,还需要进行图像传感器阵列104(第一晶圆105)与待检测晶圆102的对准,使得待检测晶圆102的位置能与图像传感器阵列104上的图像传感器107位置对应。由于晶圆载台101的初始位置是已知的,并且图像传感器阵列104上各图像传感器107的位置是固定的,待检测晶圆102上缺口(notch)的位置是固定的,因而在获取待检测晶圆整个表面对应的检测图像前,采用图像传感器阵列104获取待检测晶圆边缘的图像,通过相应的图像处理工艺即可获得待检测晶圆102上的缺口(notch)相对于晶圆载台101的位置,通过调整晶圆载台101的位置,即可使得晶圆载台101上的待检测晶圆102与图像传感器阵列104上的图像传感器107建立位置联系,使得待检测晶圆102的位置能与图像传感器阵列104上的图像传感器107位置对应。
在一实施例中,所述缺陷判断模块108包括标准单元和比较单元,所述标准单元中存储有标准晶圆图像或者无缺陷晶圆图像,所述比较单元用于将图像获取模块获得的检测图像与标准晶圆图像或者无缺陷晶圆图像进行比较或匹配,进而判断检测图像上是否存在缺陷以及缺陷的位置,从而判断待检测晶圆的表面是否存在缺陷。
在另一实施例中,所述缺陷判断模块108可以包括区域划分单元和比较单元,所述区域划分单元将所述检测图像划分为若干尺寸相同的若干待比较区域(在没有缺陷时,若干待比较区域上的图形和图案是相同的或重复的),所述比较单元用于将相邻的几个待比较区域进行比较,找出相邻的几个待比较区域中的不同点所在的位置即为存在缺陷的位置。
在另一实施例中,所述缺陷判断模块108还在进行缺陷判断的过程中,进行学习,获得缺陷的种类。
需要说明的是,所述缺陷判断模块108针对检测图像可以采用其他的方法或方式来判断检测图像上是否存在缺陷。
所述标准晶圆图像或者无缺陷晶圆图像为待检测晶圆在进行某一特定半导体工艺后,表面不存在缺陷时获取的图像。
在一实施例中,所述缺陷判断模块108也可以通过半导体集成制作工艺集成制作在所述第二晶圆106中。在其他实施例中,所述缺陷判断模块108可以为单独的芯片或者处理器。
在一实施例中,请参考图3,所述晶圆缺陷检测设备还包括照明光源109,所述照明光源109用于在进行检测时对待检测晶圆102的表面进行照明。本实施例中,所述照明单元109设置于晶圆载台101和第一晶圆105的一侧,在进行缺陷检测时,所述晶圆载台101可以偏转使得待检测晶圆102处于倾斜状态,同时所述照明单元109对待检测晶圆102的表面进行照明,所述图像获取模块103中的图像传感器阵列104通过进行一次拍摄获得待检测晶圆整个表面对应的具有暗场(dark field)的检测图像。在一实施例中,所述照明单元109可以环绕所述晶圆载台101和第一晶圆105旋转。在另一实施例中,所述照明单元109的数量可以为多个(大于等于2个),多个照明单元109均匀(等角度)分布在晶圆载台101和第一晶圆105的周围。
在其他实施例中,所述照明光源可以直接设置于图像传感器阵列104中图像传感器107的一侧,在进行拍摄时,对待检测晶圆102的正面进行照明,所述图像传感器阵列104通过进行拍摄获得待检测晶圆整个表面对应的具有明场(bright field)的检测图像。
本发明的所述晶圆缺陷检测设备,由于所述图像获取模块103包括第一晶圆105,所述第一晶圆105中形成有图像传感器阵列104,因而图像传感器阵列104中相邻的图像传感器107之间的位置是固定不变的,从而在图像获取模块103通过图像传感器阵列104获取待检测晶圆102整个表面的检测图像时,相邻的图像传感器107之间的前后左右位置以及高度位置无需进行校准,简化的晶圆缺陷检测设备的操作流程,并且无需额外设置辅助的校准结构因而能简化图像获取模块103的结构,减小图像获取模块103的体积。此外,由于第一晶圆105的一整块晶圆都是用于形成图像传感器阵列104,因而无需像现有的集成电路制作晶圆需要设置切割道,后续还要将晶圆进行分割单个的芯片,因而第一晶圆105上可以有更多的空间用于形成图像传感器107以及与图像传感器107连接的功能电路。
并且,所述图像获取模块103通过图像传感器阵列104进行一次拍摄获得待检测晶圆102整个表面对应的检测图像,因而在进行检测图像的获取时所述晶圆载台101无需进行扫描移动(沿水平方向移动),并且本申请中所述晶圆载台101仅需在与图像传感器阵列104进行对准时沿垂直方向和/或沿水平方向小范围或小距离移动,因而晶圆载台101和相应的驱动单元或驱动装置体积可以较小,加上图像传感器阵列104占据的体积也较小,进而减小整个晶圆缺陷检测设备占据的体积,并能减少能耗(驱动体积小减少能耗)。并且本申请中,待检测晶圆102整个表面对应的检测图像获取是通过图像获取模块103通过图像传感器阵列104进行一次拍摄获得,所述缺陷判断模块108根据图像获取模块103获得的检测图像,判断待检测晶圆102的表面是否存在缺陷,在进行缺陷检测时,检测图像获取的时间极大的减少(一次瞬态成像),提高了缺陷检测的效率,降低成本(图像传感器阵列相比于光学扫描放大镜的成本大幅减小)。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。