一种垃圾主动分类回收方法
文献发布时间:2023-06-19 09:51:02
技术领域
本申请涉及物联网技术领域,具体涉及一种垃圾主动分类回收方法。
背景技术
目前,城市垃圾数日益增加,在处理城市垃圾时会对城市垃圾进行分类和回收处理,以提高资源回收利用效率和减轻环境污染带来的危害。
然而,目前城市居民垃圾分类意识较差,部分城市在垃圾分类方式上仍然较为粗放。垃圾分类仅仅依靠标识语或自觉来实施,因此,分类回收中容易出现错误的分类、可回收垃圾桶中参杂无用或有害垃圾,并且当前垃圾主动分类回收方法只针对可回收垃圾,对于干垃圾与湿垃圾的分类处理能力不足,并不能满足干湿分离的要求。
由此可见,目前的垃圾分类和回收处理的效率、有效性均较差,且无法实现智能化分类清运。
发明内容
本申请实施例提供一种垃圾主动分类回收方法,能够提高垃圾分类和回收处理的效率、有效性,且实现智能化分类清运。
第一方面,本申请实施例提供了一种垃圾主动分类回收方法,所述智能垃圾回收设备包括主动分类模块、可回收垃圾模块和智能测控系统;
其中,所述主动分类模块包括用于搭载工作机构的整体框架、用于支撑整体框架的支撑架;所述工作机构包括主动分类投递机构、主动分类识别机构、垃圾存储室;
所述主动分类投递机构位于所述主动分类模块的正面上半部分;所述主动分类识别机构设置于所述主动分类模块的上半部分内部,且位于所述主动分类投递机构的背面,所述可回收模块与所述主动分类模块垂直放置所述可回收模块与所述主动分类模块之间为面接触,所述可回收模块与所述主动分类模块之间通过隐藏锚式连接件进行连接;所述可回收模块包括多个垃圾桶;
所述主动分类模块还包括识别挡板和电动推杆;
所述智能测控系统检测到所述垃圾存储室内存在待投递的目标垃圾后,接收第一指令根据所述第一指令,确定目标垃圾的目标垃圾种类并确定所述垃圾种类对应的目标垃圾桶;
所述智能测控系统在操作界面显示垃圾种类选择图标;
所述智能测控系统接收用户针对所述垃圾种类选择图标中目标垃圾种类的第二指令,响应于所述第二指令,通过所述第二指令控制电动推杆进行直线运动,以对所述识别挡板进行滑动开启,以将所述目标垃圾投递至所述目标垃圾桶。
一些实施方式中,所述方法还包括:
若确定所述目标垃圾的目标垃圾种类与目标垃圾桶不匹配,则所述智能测控系统不开启所述识别挡板,以使得所述目标垃圾暂存在所述主动投递识别机构的腔体;
所述智能测控系统发出第一语音提示,所述第一语音提示用于提示用户重新正确投递所述目标垃圾。
一些实施方式中,所述目标垃圾由专用垃圾袋包装;所述确定目标垃圾的目标垃圾种类,包括:
使用工业二维码扫描仪对所述专用垃圾袋上的专用二维码,每种专用垃圾袋对应同一种专用二维码,同一种专用二维码对应同一种类型的垃圾种类;
获取所述专用二维码对应的垃圾种类;
以所述专用二维码对应的垃圾种类作为所述目标垃圾种类。
一些实施方式中,所述智能监控系统包括溢满检测模块,所述将所述目标垃圾投递至所述目标垃圾桶之前,所述方法还包括:
通过所述溢满检测模块检测所述目标垃圾桶内的空间,以检测所述目标垃圾桶的溢满状态;
若检测出所述溢满状态满足预设溢满条件,则发出第二语音提示并控制所述识别挡板进行滑动关闭,所述第二语音提示用于提示所述目标垃圾桶当前无法投递所述目标垃圾。
一些实施方式中,所述智能监控系统包括重量检测模块,所述将所述目标垃圾投递至所述目标垃圾桶之前,所述方法还包括:
通过所述重量检测模块检测所述目标垃圾的重量以及检测所述目标垃圾桶内的垃圾总重量;
若所述垃圾总重量和所述目标垃圾的重量之和大于预设重量,则发出第三语音提示并控制所述识别挡板进行滑动关闭,所述第二语音提示用于提示所述目标垃圾桶当前无法投递所述目标垃圾。
一些实施方式中,所述智能监控系统包括气味分析模块和消毒液水泵模块,所述将所述目标垃圾投递至所述目标垃圾桶之前,所述方法还包括:
通过所述气味分析模块实时检测所述目标垃圾桶内的空气质量;
若所述空气质量为污染状态,则确定污染状态的污染级别;
根据所述污染级别确定消毒剂种类和剂量,并驱动所述消毒液水泵模块向所述目标垃圾桶内注入对应所述消毒剂种类和剂量的消毒剂,以对所述目标垃圾桶进行消毒和净化处理。
本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果:
通过在主动分类模块中设置识别挡板和电动推杆,使得气味分析模块检测到垃圾存储室内存在待投递的目标垃圾后,根据第一指令确定目标垃圾的目标垃圾种类并确定垃圾种类对应的目标垃圾桶;接收用户针对垃圾种类选择图标中目标垃圾种类的第二指令,通过第二指令控制电动推杆进行直线运动,以对识别挡板进行滑动开启,以将目标垃圾投递至目标垃圾桶。本方案能够提高垃圾分类和回收处理的效率、有效性,以及实现智能化分类。
附图说明
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1a是本申请中智能垃圾回收设备的一种结构示意图;
图1b是本申请中智能测控系统的一种结构示意图;
图2a是本申请中主动分类模块的一种结构示意图;
图2b是本申请中主动分类模块的一种结构示意图;
图2c是本申请中主动分类模块中工作机构的一种结构示意图;
图3是本申请中垃圾主动分类回收方法的一种示意图。
附图标记:
1.垃圾存储室门
2.主动分类垃圾投递门
3.操作屏幕
4.整体框架
5.顶部支撑板
6.主动分类垃圾投递面板
7.直线推杆
8.识别机构导向侧板
9.识别机构滑动挡板
10.滑轨
11.限位固定机构
12.主动分类模块背部支撑板
13.垃圾存储室称重装置
14.垃圾存储室底座
15.消毒管
16.喷淋头
17.固定铰支座
38.可回收物模块箱门
39.可回收物瓶类投递门
40.可回收物投递面板
41.可回收物模块操作屏幕
42.可回收物纸类投递门
43.可回收物模块顶板
44.可回收物模块限位固定机构
45.可回收物模块整体框架
46.可回收物模块称重装置
47.可回收物模块底座
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
在以下的说明中,本申请的具体实施例将参考由一部或多部计算机所执行的步骤及符号来说明,除非另有述明。因此,这些步骤及操作将有数次提到由计算机执行,本文所指的计算机执行包括了由代表了以一结构化型式中的数据的电子信号的计算机处理单元的操作。此操作转换该数据或将其维持在该计算机的内存系统中的位置处,其可重新配置或另外以本领域测试人员所熟知的方式来改变该计算机的运作。该数据所维持的数据结构为该内存的实体位置,其具有由该数据格式所定义的特定特性。但是,本申请原理以上述文字来说明,其并不代表为一种限制,本领域测试人员将可了解到以下所述的多种步骤及操作亦可实施在硬件当中。
本申请的原理使用许多其它泛用性或特定目的运算、通信环境或组态来进行操作。所熟知的适合用于本申请的运算系统、环境与组态的范例可包括(但不限于)手持电话、个人计算机、服务器、多处理器系统、微电脑为主的系统、主架构型计算机、及分布式运算环境,其中包括了任何的上述系统或装置。
本申请中的术语“第一”、“第二”和“第三”等是用于区别不同对象,而不是用于描述特定顺序。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。
参阅图1a-图3,图1a示出了本申请智能垃圾回收设备的一种结构示意图,图1b示出了本申请主动分类模块的一种结构示意图,图2a-图 2b示出了本申请主动分类模块的一种结构示意图,图3示出了本申请垃圾主动分类回收方法的一种流程示意图,本申请提供的垃圾主动分类回收方法,该所述智能垃圾回收设备包括主动分类模块、可回收垃圾模块和智能测控系统;
其中,所述主动分类模块包括用于搭载工作机构的整体框架、用于支撑整体框架的支撑架;所述工作机构包括主动分类投递机构、主动分类识别机构、垃圾存储室;
所述主动分类投递机构位于所述主动分类模块的正面上半部分;所述主动分类识别机构设置于所述主动分类模块的上半部分内部,且位于所述主动分类投递机构的背面,所述可回收模块与所述主动分类模块垂直放置所述可回收模块与所述主动分类模块之间为面接触,所述可回收模块与所述主动分类模块之间通过隐藏锚式连接件进行连接;所述可回收模块包括多个垃圾桶。
所述主动分类模块还包括识别挡板和电动推杆,其中,电动推杆位于识别挡板的一侧,电动推杆的尾端轴套与识别挡板的尾部一侧轴同轴配合,使用铰支座螺栓进行定位固定。
所述整体框架包括支撑架、第一支撑板、第二支撑板、背部支撑板、顶部支撑板。
图2a是本申请中主动分类模块的一种结构侧视示意图,图2b是本申请中主动分类模块的一种结构侧视示意图。
一些实施方式中,如图2a和图2b所示,所述主动分类投递机构包括投递面板,第一投递门、第二投递门、第三投递门,所述投递面板上安装有操作屏幕,所述投递面板上设有第一投递口、第二投递口和第三投递口;
所述第一投递门与所述第一投递口通过螺栓和弹簧合页相连接,所述第二投递门与所述第二投递口通过螺栓和弹簧合页相连接,所述第三投递门与所述第三投递口通过螺栓和弹簧合页相连接。
所述主动分类识别机构包括由第一识别挡板、第二识别挡板、第三识别挡板、第一电动推杆、第二电动推杆、第三电动推杆、第四电动推杆、第五电动推杆、第六电动推杆、第一滑轨、第二滑轨、第三滑轨、第四滑轨、第五滑轨、第六滑轨、第一固定铰支座、第二固定铰支座、第三固定铰支座、第四固定铰支座、第五固定铰支座、第六固定铰支座。
其中,所述第一固定铰支座、第二固定铰支座、第三固定铰支座、第四固定铰支座、第五固定铰支座、第六固定铰支座通过焊接与整体框架顶部支撑板相连接。
第一电动推杆的前端轴套与第一固定铰支座同轴配合,使用铰支座螺栓进行定位固定,第一电动推杆位于第一识别挡板的一侧,第一电动推杆的尾端轴套与第一识别挡板的尾部一侧轴同轴配合,使用铰支座螺栓进行定位固定。
第二电动推杆的前端轴套与第二固定铰支座同轴配合,使用铰支座螺栓进行定位固定,第二电动推杆位于第一识别挡板的另一侧,第一电动推杆的尾端轴套与第一识别挡板的尾部另一侧轴同轴配合,使用铰支座螺栓进行定位固定,第三电动推杆的前端轴套与第三固定铰支座同轴配合,使用铰支座螺栓进行定位固定。
第三电动推杆位于第二识别挡板的一侧,第三电动推杆的尾端轴套与第二识别挡板的尾部一侧轴同轴配合,使用铰支座螺栓进行定位固定。
第四电动推杆的前端轴套与第四固定铰支座同轴配合,使用铰支座螺栓进行定位固定,第四电动推杆位于第二识别挡板的另一侧,第四电动推杆的尾端轴套与第二识别挡板的尾部另一侧轴同轴配合,使用铰支座螺栓进行定位固定,第五电动推杆的前端轴套与第五固定铰支座同轴配合,使用铰支座螺栓进行定位固定。
第五电动推杆位于第三识别挡板的一侧,第五电动推杆的尾端轴套与第三识别挡板的尾部一侧轴同轴配合,使用铰支座螺栓进行定位固定。
第六电动推杆的前端轴套与第六固定铰支座同轴配合,使用铰支座螺栓进行定位固定,第六电动推杆位于第三识别挡板的另一侧,第六电动推杆的尾端轴套与第三识别挡板的尾部另一侧轴同轴配合,使用铰支座螺栓进行定位固定。
第一滑轨前端通过螺栓与主动分类投递面板第一投递口一侧连接固定,第一滑轨尾端通过螺栓与支撑架连接固定,第一滑轨通过第一识别挡板一侧的滑轮嵌入第一滑轨的滑槽实现与第一识别挡板的连接定位。
第二滑轨前端通过螺栓与主动分类投递面板第一投递口另一侧连接连接固定,第二滑轨尾端通过螺栓与支撑架连接固定,第二滑轨通过第一识别挡板另一侧的滑轮嵌入第二滑轨的滑槽实现与第一识别挡板的连接定位,第三滑轨尾端通过螺栓与支撑架连接固定。
第三滑轨通过第二识别挡板一侧的滑轮嵌入第三滑轨的滑槽实现与第二识别挡板的连接定位,第四滑轨前端通过螺栓与主动分类投递面板第二投递口另一侧连接固定。
第四滑轨尾端通过螺栓与支撑架连接固定,第四滑轨通过第二识别挡板另一侧的滑轮嵌入第四滑轨的滑槽实现与第二识别挡板的连接定位。
第五滑轨尾端通过螺栓与支撑架连接固定,第五滑轨通过第三识别挡板一侧的滑轮嵌入第五滑轨的滑槽实现与第三识别挡板的连接定位。
第六滑轨前端通过螺栓与主动分类投递面板第三投递口另一侧连接固定,第六滑轨尾端通过螺栓与支撑架连接固定,第六滑轨通过第三识别挡板另一侧的滑轮嵌入第六滑轨的滑槽实现与第三识别挡板的连接定位。
所述消毒装置包括水泵、消毒管、喷淋头、消毒液容纳箱,所述消毒管安装在主动分类模块的顶部;所述喷淋头安装在喷淋管上;
所述垃圾存储室设置于主动分类模块的下半部分内部,位于主动分类投递机构的下方。所述垃圾存储室包括用于固定标准垃圾桶的第一固定机构(为限位机构)以及垃圾存储室底座;所述垃圾存储室通过整体框架结构分设为第一存储室、第二存储室、第三存储室,所述第一存储室设有第一存储室门,通过合页与螺栓与整体框架相连接,所述第一存储室门位于主动分类模块下半部分正面,位于第一投递口的正下方,所述第一存储室门上设有旋转锁扣;所述第二存储室设有第二存储室门,通过合页与螺栓与整体框架相连接,所述第二存储室门位于主动分类模块下半部分正面,位于第二投递口的正下方,所述第二存储室门上设有旋转锁扣;所述第三存储室设有第三存储室门,通过合页与螺栓与整体框架相连接,所述第三存储室门位于主动分类模块下半部分正面,位于第三投递口的正下方。
图2c是本申请中主动分类模块中工作机构的一种结构示意图。
第一固定机构包括第一固定臂、第二固定臂、第三固定臂、第四固定臂、第五固定臂、第六固定臂,设置于投递机构下方,第一固定臂通过螺栓和角码连接件与第一存储室的一侧框架相连,第二固定臂通过螺栓和角码连接件与第一存储室的另一侧框架相连,第一固定臂与第二固定臂高度相同,对称布置,共同构成用于限定标准垃圾桶位置的第一存储室固定机构;
第三固定臂通过螺栓和角码连接件与第二存储室的一侧框架相连,第四固定臂通过螺栓和角码连接件与第二存储室的另一侧框架相连,第三固定臂与第四固定臂高度相同,对称布置,共同构成用于限定标准垃圾桶位置的第二存储室固定机构;
第五固定臂通过螺栓和角码连接件与第三存储室的一侧框架相连,第六固定臂通过螺栓和角码连接件与第三存储室的另一侧框架相连,第五固定臂与第六固定臂高度相同,对称布置,共同构成用于限定标准垃圾桶位置的第三存储室固定机构;
所述垃圾存储室底座位于整体框架的底部,标准垃圾桶置于其上,所述垃圾存储室底座包括由第一垃圾存储室底座、第二垃圾存储室底座、第三垃圾存储室底座组成,所述第一垃圾存储室底座内部设有第一重量传感器,所述第二垃圾存储室底座内部设有第二重量传感器,所述第三垃圾存储室底座内部设有第三重量传感器。
如图2a、图2b所示,所述可回收垃圾模块包括用于搭载可回收垃圾投递机构与分导装置的整体框架、用于支撑整体框架的支撑架、可回收物存储室,所述可回收物存储室包括用于固定标准垃圾桶的限位固定机构以及垃圾存储室底座;所述的支撑架下端固定设置有支撑地脚,所述支撑地脚与地面接触;
所述的整体框架包括支撑架、一侧支撑板、另一侧支撑板、背部可拆卸支撑板、顶部支撑板;
所述可回收垃圾投递机构位于主动分类模块的正面上半部分,包括由可回收物投递面板,所述可回收物投递面板上安装有操作屏幕所述的可回收垃圾投递机构包括纸类投递机构和瓶类投递机构,所述的纸类投递机构包括纸类投递门,纸类投递门驱动电机,传动齿条;所述瓶类投递机构包括瓶类投递门,瓶类投递门驱动电机,传动齿轮;所述纸类投递门为矩形,开关方式为升降式;所述瓶类投递门为圆形,开关方式为快门式旋转开合。
其中,所述可回收物分导装置设置于投递口正下方,通过螺栓与支撑架相连接;
所述可回收物存储室设置于可回收垃圾模块的下半部分内部,位于分导装置的下方,所述可回收物存储室包括用于固定标准垃圾桶的限位固定机构以及可回收物存储室底座;所述的垃圾存储室通过整体框架结构分设为纸类可回收物存储室、瓶类可回收物存储室;所述纸类可回收物存储室设有纸类可回收物存储室门,通过合页与螺栓与整体框架相连接,所述纸类可回收物存储室门位于可回收垃圾模块下半部分正面,位于纸类投递门的正下方,所述纸类可回收物存储室门上设有旋转锁扣;所述瓶类可回收物存储室设有瓶类可回收物存储室门,通过合页与螺栓与整体框架相连接,所述瓶类可回收物存储室门位于可回收垃圾模块下半部分正面,位于瓶类投递口的正下方,所述瓶类可回收物存储室门上设有旋转锁扣。
第二固定机构(用于固定标准垃圾桶的结构)包括第一固定臂、第二固定臂、第三固定臂、第四固定臂,设置于分导装置下方,第一固定臂通过螺栓和角码连接件与纸类可回收物存储室的一侧框架相连,第二固定臂通过螺栓和角码连接件与纸类可回收物存储室的另一侧框架相连,第一固定臂与第二固定臂高度相同,对称布置,共同构成用于限定标准垃圾桶位置的纸类可回收物存储室固定机构;第三固定臂通过螺栓和角码连接件与瓶类可回收物存储室的一侧框架相连,第四固定臂通过螺栓和角码连接件与瓶类可回收物存储室的另一侧框架相连,第三固定臂与第四固定臂高度相同,对称布置,共同构成用于限定标准垃圾桶位置的第瓶类可回收物存储室固定机构。
所述可回收垃圾存储室底座位于整体框架的底部,标准垃圾桶置于其上,所述垃圾存储室底座包括由纸类可回收物存储室底座、瓶类可回收物存储室底座,所述纸类可回收物存储室底座内部设有第一重量传感器,瓶类可回收物存储室底座内部设有第二重量传感器。
一些实施方式中,可基于上述智能垃圾回收设备可实施上述垃圾主动分类回收方法,具体来说,本申请实施例包括:
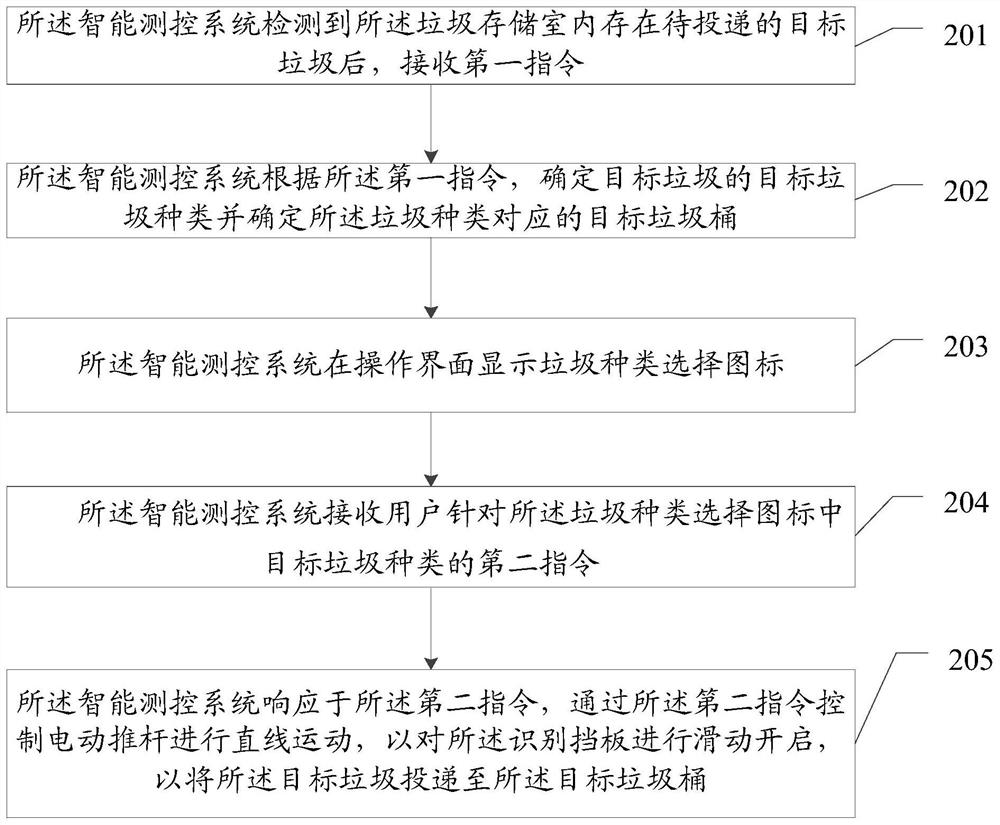
201、所述智能测控系统检测到所述垃圾存储室内存在待投递的目标垃圾后,接收第一指令;
202、所述智能测控系统根据所述第一指令,确定目标垃圾的目标垃圾种类并确定所述垃圾种类对应的目标垃圾桶;
203、所述智能测控系统在操作界面显示垃圾种类选择图标;
204、所述智能测控系统接收用户针对所述垃圾种类选择图标中目标垃圾种类的第二指令。
205、所述智能测控系统响应于所述第二指令,通过所述第二指令控制电动推杆进行直线运动,以对所述识别挡板进行滑动开启,以将所述目标垃圾投递至所述目标垃圾桶。
一些实施方式中,所述方法还包括:
若确定所述目标垃圾的目标垃圾种类与目标垃圾桶不匹配,则所述智能测控系统不开启所述识别挡板,以使得所述目标垃圾暂存在所述主动投递识别机构的腔体;
所述智能测控系统发出第一语音提示,所述第一语音提示用于提示用户重新正确投递所述目标垃圾。
一些实施方式中,所述目标垃圾由专用垃圾袋包装;所述确定目标垃圾的目标垃圾种类,包括:
使用工业二维码扫描仪对所述专用垃圾袋上的专用二维码,每种专用垃圾袋对应同一种专用二维码,同一种专用二维码对应同一种类型的垃圾种类;
获取所述专用二维码对应的垃圾种类;
以所述专用二维码对应的垃圾种类作为所述目标垃圾种类。
一些实施方式中,所述智能监控系统包括溢满检测模块,所述将所述目标垃圾投递至所述目标垃圾桶之前,所述方法还包括:
通过所述溢满检测模块检测所述目标垃圾桶内的空间,以检测所述目标垃圾桶的溢满状态;
若检测出所述溢满状态满足预设溢满条件,则发出第二语音提示并控制所述识别挡板进行滑动关闭,所述第二语音提示用于提示所述目标垃圾桶当前无法投递所述目标垃圾。
一些实施方式中,所述智能监控系统包括重量检测模块,所述将所述目标垃圾投递至所述目标垃圾桶之前,所述方法还包括:
通过所述重量检测模块检测所述目标垃圾的重量以及检测所述目标垃圾桶内的垃圾总重量;
若所述垃圾总重量和所述目标垃圾的重量之和大于预设重量,则发出第三语音提示并控制所述识别挡板进行滑动关闭,所述第二语音提示用于提示所述目标垃圾桶当前无法投递所述目标垃圾。
一些实施方式中,所述智能监控系统包括气味分析模块、消毒液水泵模块和消毒装置,所述将所述目标垃圾投递至所述目标垃圾桶之前,所述方法还包括:
通过所述气味分析模块实时检测所述目标垃圾桶内的空气质量;
若所述空气质量为污染状态,则确定污染状态的污染级别;
根据所述污染级别确定消毒剂种类和剂量,并驱动所述消毒液水泵模块向所述目标垃圾桶内注入对应所述消毒剂种类和剂量的消毒剂,以对所述目标垃圾桶进行消毒和净化处理。
一些实施方式中,所述可回收物模块包括用于搭载可回收垃圾投递机构与分导装置的整体框架、用于支撑整体框架的支撑架、可回收物存储室,可回收物存储底座;
所述确定目标垃圾的目标垃圾种类之后,所述方法还包括:
若检测出所述溢满状态未满足所述预设溢满条件,则开启所选择的垃圾投递入口,以及开启与垃圾投递入口对应的可回收垃圾门;
若所述目标垃圾是纸类可回收物,则降下纸类投递门并投递所述纸类可回收物,以使得所述纸类可回收物在分导装置的导向下落入所述纸类可回收物的存储室,最终该所述纸类可回收物落入相应垃圾桶内;
垃圾存储室底座的重量传感器对投入的垃圾进行称重,将数据上传。
若所述目标垃圾是瓶类可回收物,则旋转开启瓶类投递门,且位于旋转门后的光电计数器进行计数,以使得所述瓶类可回收物在分导装置的导向下落入瓶类可回收物存储室,垃圾存储室底座的重量传感器对投入的垃圾进行称重,将数据上传。
一些实施方式中,智能垃圾分类回收设备在不执行投递动作时,垃圾桶内部状态监测传感器实时运行。以温烟传感器为例,当温烟传感器所测得数据超过设定值时,开启语音警报并通知设备管理人员;当重量传感器或溢满检测传感器测得数据超过设定值时通知设备管理人员进行及时清运;当空气质量传感器检测到的数据超过设定值时,启动消毒液水泵进行消毒喷淋,对箱内进行消毒灭菌,防止异味;当液位传感器测得消毒液降低到设定值时,通知管理人员进行添加消毒液。
与现有技术相比,本申请实施例中,通过设置识别挡板和电动推杆,主动分类模块检测到垃圾存储室内存在待投递的目标垃圾后,从智能测控系统接收第一指令;根据第一指令确定目标垃圾的目标垃圾种类并确定垃圾种类对应的目标垃圾桶;接收用户针对垃圾种类选择图标中目标垃圾种类的第二指令,通过第二指令控制电动推杆进行直线运动,以对识别挡板进行滑动开启,以将目标垃圾投递至目标垃圾桶。因此,本方案能够提高垃圾分类和回收处理的效率、有效性,以及实现智能化分类。
具体来说,在用户进行垃圾投递过程中,通过操作界面选择投递的垃圾种类,并且开启相应的投递门的过程中能够更进一步的确认所投递的垃圾种类,减少错误投递。因此,相较于现有技术中通过垃圾回收设备的外观差异来进行不同种类垃圾的收集容易造成错误的收集,垃圾容易混装,本申请能够提高垃圾分类的准确性,且容错性较低。
在用户进行垃圾投递后,目标垃圾不立即投递至目标垃圾桶内,而是暂留在主动投递识别机构的垃圾存储室内,通过识别挡板进行垃圾的进一步掉落,在识别所投递的垃圾种类与相应垃圾桶匹配后,通过电动推杆的直线运动使识别挡板滑动开启,垃圾下落到相应垃圾桶中,在识别所投递的垃圾种类与相应垃圾桶不匹配后,识别挡板不开启,垃圾暂存在主动投递识别机构的腔体内,语音提醒正确投递,通过设置主动投递识别机构能够有效的解决单次错误投递的问题,使得已完成分类的垃圾更便于管理与统一清运。
此外,通过加入多种传感器实现对垃圾回收设备内部状态实现实时监控,以达到对生活垃圾的高效管理;通过模块化组合的设计,满足不同生活区域对垃圾的收纳需求;通过其智能系统能够实现自动识别垃圾,溢满检测,温度报警,自动消毒等功能。能够结合标准化垃圾桶配套使用,解决了目前垃圾回收设备清运难的问题,同时能够实现垃圾的自动管理。
本领域普通技术人员可以理解,上述实施例的各种垃圾主动分类回收方法中的全部或部分步骤可以通过指令来完成,或通过指令控制相关的硬件来完成,该指令可以存储于一计算机可读存储介质中,并由处理器进行加载和执行。
为此,本申请实施例提供一种计算机可读存储介质,其中存储有多条指令,该指令能够被处理器进行加载,以执行本申请如图1a至图3中任一对应任意实施例垃圾主动分类回收方法中各模块的功能,具体操作可参考如图1a至图3中任一对应任意实施例垃圾主动分类回收方法的说明,在此不再赘述。
其中,该计算机可读存储介质可以包括:只读存储器(ROM,Read Only Memory)、随机存取记忆体(RAM,Random Access Memory)、磁盘或光盘等。
由于该计算机可读存储介质中所存储的指令,可以执行本申请如图1a-图3对应任意实施例垃圾主动分类回收方法中的步骤,因此,可以实现本申请如图1a-图3对应任意实施例垃圾主动分类回收方法所能实现的有益效果,详见前面的说明,在此不再赘述。
以上对本申请提供的一种垃圾主动分类回收方法、装置、处理设备及计算机可读存储介质进行了详细介绍,本申请中应用了具体个例对本申请的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本申请的垃圾主动分类回收方法及其核心思想;同时,对于本领域的技术人员,依据本申请的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本申请的限制。
- 一种垃圾主动分类回收方法
- 一种垃圾分类回收系统和垃圾分类回收方法