一种用于一抓多的旋转手爪装置
文献发布时间:2023-06-19 10:13:22
技术领域:
本发明属于光伏生产领域,涉及光伏组件生产设备,特别是涉及一种用于光伏组件生产中的一抓多旋转手爪装置。
背景技术:
随着光伏组件生产过程中对设备产能要求的提高,一抓多的方案就应运而生,为了使设备能够在提高产能的同时兼顾到重复精度以及经济性、实用性,本发明设计了一种用于光伏组件生产中的一抓多旋转手爪装置,该装置能够大大的提高设备的产能,满足市场需求,结构简单,成本低,精度高。
发明内容:
本发明主要是解决的技术问题是提供一种用于光伏组件生产中的一抓多旋转手爪装置,以解决现有技术中设备产能低、制造成本高的技术问题。
本发明是通过以下技术方案得以解决的:
一种用于一抓多的旋转手爪装置,该装置包含一抓多手爪、驱动装置、视觉装置,其特征在于:所述一抓多手爪与驱动装置相连,所述驱动装置安装在机械手上,所述视觉装置位于被吸取物检测区域的上方或下方,两者相距一定空间间距。
作为优选,上述一种用于一抓多的旋转手爪装置中所述的一抓多手爪,包括一块异形板、若干块吸盘安装板、若干枚吸盘以及其他零件,所述的吸盘安装板被以一定角度均布地安装在所述的异形板上,所述的吸盘安装在所述的吸盘安装板上;
或所述的异形板和所述的吸盘安装板为一个整体结构,可以通过制造过程实现,所述的吸盘安装在所述的吸盘安装板上。
作为优选,上述一种用于一抓多的旋转手爪装置中所述的异形板一端设置有安装吸盘安装板的安装面,所述的异形板远离所述的吸盘安装板安装面的一端设置有安装驱动轴的轴孔结构。
作为优选,上述一种用于一抓多的旋转手爪装置中所述的吸盘安装板下表面设置有安装所述吸盘的安装孔位,并且所述的吸盘安装板内部设置有气路,通过相关控制元件控制气路中气流的流动方向、通断实现对所述吸取物的吸取和放置。
作为优选,上述一种用于一抓多的旋转手爪装置中所述的驱动装置,包括原动机、安装架、驱动轴、连接体及其他控制元件,所述的原动机安装在所述的安装架上,所述的原动机通过所述的连接体与所述的驱动轴同轴线相连,所述的驱动轴安装在所述的安装架上。
作为优选,上述一种用于一抓多的旋转手爪装置中所述的安装架上设置有减小摩擦和延长装置寿命的滚动体,所述的滚动体被限制的安装在所述的安装架上,保证其在运行过程中不会脱出所述的安装架。
作为优选,上述一种用于一抓多的旋转手爪装置中所述的视觉装置,包括视觉安装支架、视觉元件以及控制元件,所述的视觉安装支架与所述的安装架相连,所述视觉元件安装在所述视觉安装支架上,且所述视觉元件位于所述被吸取物检测区域的上方或下方,两者相距一定间距。
作为优选,上述一种用于一抓多的旋转手爪装置中所述的视觉安装支架设置有对所述视觉元件进行微调的微调装置滑块和调节螺钉。
在本申请中,一种用于光伏组件生产中的一抓多旋转手爪装置,该装置包含机械手,在所述的机械手上设置有一抓多的驱动装置,所述的驱动装置用来驱动所述的一抓多手爪,所述的驱动装置由所述的控制元件控制往复回转运动。所述的一抓多手爪在所述的驱动装置作用下做往复回转运动,通过相关控制元件控制气路中气流的流动方向、通断实现对所述吸取物的吸取和放置。所述的一抓多旋转手爪装置还包括用来检测被吸取物的姿态及缺陷的视觉装置,所述的视觉装置与所述的驱动装置上的安装架相连,且所述所述的视觉装置位于所述的被吸取物检测区域的上方或下方,相距一定距离,所述的视觉装置由所述的视觉控制元件控制工作。
本发明所述的一种用于光伏组件生产中的一抓多手爪装置,包括手爪驱动装置,手爪驱动装置包括与机械手相连的安装架,在安装架上设置有滚动体,在滚动体内装有驱动轴,驱动轴通过连接体与原动机共轴线相连,原动机由控制器控制往复转动,从而带动驱动轴在滚动体内做往复转动。该装置的优点是:机械结构简单、制造成本低、重复定位精度高。在其中一个实施列中,所述滚动体为深沟球轴承或其他类型的轴承,用来减少摩擦,延长装置的寿命;所述的驱动轴上设置有键槽,通过键将动力传递给旋转手爪,所述连接体为各种类型的联轴器,用来将动力传递给驱动轴;所述的原动机由伺服电机和重复定位精度很高的减速器组成,用来提供动力。
本发明所述的一种用于光伏组件生产中的一抓多手爪装置,包括旋转手爪装置,旋转手爪装置包括与驱动装置中的驱动轴相连的异形板,异形板上以一定角度均布地安装有若干块吸盘安装板,若干枚吸盘被以需求的规则安装在吸盘安装板上。旋转手爪装置在驱动装置驱动轴的带动下做往复转动,机械手带动整个一抓多手爪装置做相应的抬高、降低动作,通过相关控制元件控制气路中气流的流动方向、通断实现对所述吸取物的吸取和放置。该装置可灵活调整吸盘安装板的数量、兼容性高、重复定位精度高。在其中一个实施列中,所述的异形板上开设有键槽,用来传递动力。吸盘安装板安装面设置有定位槽,相应的吸盘安装板上表面也设置有定位槽,降低装配难度,提高装配精度,吸盘安装板与异形板通过螺钉连接。吸盘通过吸盘安装板下表面上设置的螺纹孔安装在吸盘安装板上。
本发明所述的一种用于光伏组件生产中的一抓多手爪装置,包括视觉装置,视觉装置包括与所述的驱动装置安装架相连的视觉安装支架,视觉元件被安装在设置有微调装置的视觉安装支架里,通过微调装置,视觉元件可在水平面内沿X、Y方向进行微小的调整,保证所述视觉元件位于被吸取物检测区域的上方或下方,相距一定距离,通过视觉控制元件控制其工作对被吸取物的姿态、缺陷进行检测。该装置的优点是:成本低、检测精度高。在其中一个实施例中,所述的视觉元件为一对视觉相机,所述的视觉安装支架上设置有滑块槽,沿视觉安装支架四周对称呈90度分布,相邻90度两滑块槽内置滑块,滑块上设置螺纹孔,两调节螺钉呈90度,一端与滑块螺纹孔相连,另一端与滑块槽配合,通过旋转调节螺钉实现对视觉元件的微调。
本发明的工作过程是:
被吸取物被输送到取片位,伺服电机转动使得一抓多旋转手爪的某一吸盘安装板平行于被吸取物,机械手下降,使得吸盘与被吸取物接触,气路控制元件控制产生真空,被吸取物被吸附住,在此过程中视觉元件检测被吸取物的姿态和缺陷并记录,机械手上抬,伺服电机转动使得一抓多旋转手爪的下一吸盘安装板平行于被吸取物,机械手下降,使得吸盘与被吸取物接触,产生真空,被吸附物被吸附住,同样视觉元件检测并记录,重复上述动作,直至所有吸盘安装板上都有被吸附物,机械手抬高,带动一抓多旋转手爪装置一同转动到放片位或丢片位,机械手下降,气路控制元件控制破真空,将视觉装置检测合格的被吸取物放置在放片位,检测不合格的放置在丢片位,机械手抬高,伺服电机反转,将下一吸盘上的被吸取物按上述动作放置在放片位或丢片位,直至将所有被吸取物放置完成,机械手带动一抓多旋转手爪装置回到取片位,执行下一轮动作。
有益效果:本申请的装置能够大大的提高设备的产能,满足市场需求,结构简单,成本低,精度高。
附图说明
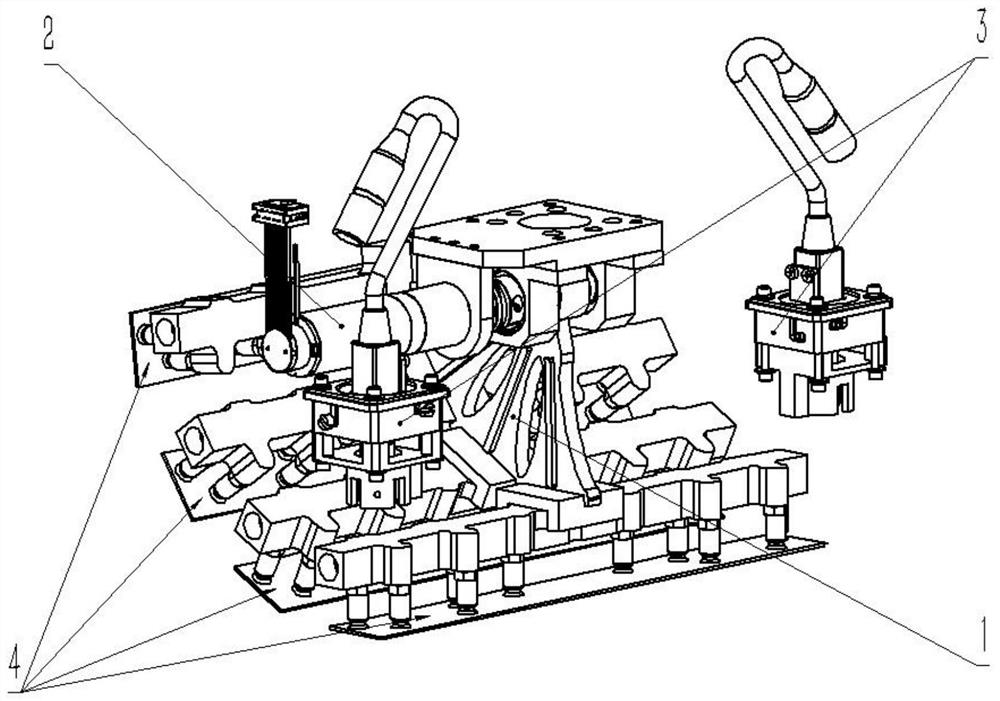
图1为本发明的结构示意图。
图2为一抓多手爪的结构示意图。
图3为驱动装置的结构示意图。
图4为视觉装置的结构示意图。
附图标记说明:1、一抓多手爪;2、驱动装置;3、视觉装置;4、被吸取物;11、异形板;12、吸盘安装板;13、吸盘;21、原动机;22、安装架;23、驱动轴;24、连接体;31、视觉安装支架;32、视觉元件;221、滚动体;311、滑块;312、调节螺钉;321、视觉相机。
具体实施方式
下面结合附图对本发明的优选实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域的技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
实施例1
一种用于一抓多的旋转手爪装置,该装置包含一抓多手爪1、驱动装置2、视觉装置3,其特征在于:所述一抓多手爪1与驱动装置2相连,所述驱动装置2安装在机械手上,所述视觉装置3位于被吸取物4检测区域的上方或下方,两者相距一定空间间距;所述的一抓多手爪1,包括一块异形板11、若干块吸盘安装板12、若干枚吸盘13以及其他零件,所述的吸盘安装板12被以一定角度均布地安装在所述的异形板11上,所述的吸盘13安装在所述的吸盘安装板12上;被吸取物被输送到取片位,伺服电机转动使得一抓多旋转手爪的某一吸盘安装板平行于被吸取物,机械手下降,使得吸盘与被吸取物接触,气路控制元件控制产生真空,被吸取物被吸附住,在此过程中视觉元件检测被吸取物的姿态和缺陷并记录,机械手上抬,伺服电机转动使得一抓多旋转手爪的下一吸盘安装板平行于被吸取物,机械手下降,使得吸盘与被吸取物接触,产生真空,被吸附物被吸附住,同样视觉元件检测并记录,重复上述动作,直至所有吸盘安装板上都有被吸附物,机械手抬高,带动一抓多旋转手爪装置一同转动到放片位或丢片位,机械手下降,气路控制元件控制破真空,将视觉装置检测合格的被吸取物放置在放片位,检测不合格的放置在丢片位,机械手抬高,伺服电机反转,将下一吸盘上的被吸取物按上述动作放置在放片位或丢片位,直至将所有被吸取物放置完成,机械手带动一抓多旋转手爪装置回到取片位,执行下一轮动作。
实施例2
本发明所述一种用于光伏组件生产中的一抓多旋转手爪装置,有利于光伏组件生产中设备产能的提高。
一抓多旋转手爪装置包括原动机21,原动机21由伺服电机和减速机组成,原动机21通过连接体24与驱动轴23同轴线连接,连接体24可以为各种类型的联轴器,驱动轴23上设置有键槽,原动机21安装在安装架22一侧面上,安装架22上设置有滚动体221,用来减少摩擦,延长装置寿命,滚动体221可以为深沟球轴承或其他类型的轴承,安装架22上表面与机械手相连,机械手可以为多轴机械手或其他类型的机械手。
一抓多旋转手爪装置还包括一抓多手爪1,一抓多手爪1由与驱动轴23相连的异形板11、吸盘安装板12、吸盘13组成,吸盘安装板12上表面设置有定位槽用来与异形板11上的定位槽相配合,保证两者的装配精度,降低装配难度,吸盘安装板12下表面设置有安装吸盘13的螺纹孔,吸盘安装板内部设置有气路,通过气路控制元件控制气路中气流的流动方向、通断实现对吸取物4的吸取和放置。
一抓多旋转手爪装置还包括视觉元件32,视觉元件32由一对视觉相机321组成,视觉元件32被安装在设置有微调装置的视觉安装支架31里,通过视觉控制元件控制其工作对被吸取物4的姿态、缺陷进行检测。视觉安装支架31上设置有滑块槽,沿视觉安装支架31四周对称呈90度分布,相邻90度两滑块槽内置滑块311,滑块311上设置螺纹孔,两调节螺钉312呈90度,一端与滑块311螺纹孔相连,另一端与滑块槽配合,通过旋转调节螺钉312实现对视觉元件32在水平面内X、Y方向的微调,保证视觉元件32位于被吸取物4检测区域的上方或下方,相距一定距离。
本发明的工作过程是:
被吸取物4被输送到取片位,原动机21转动使得一抓多旋转手爪1的某一吸盘安装板12平行于被吸取物4,机械手带动一抓多旋转手爪装置下降,使得吸盘13与被吸取物4接触,气路控制元件控制产生真空,被吸取物4被吸附住,在此过程中视觉相机321检测被吸取物4的姿态和缺陷并记录,机械手上抬,原动机21转动使得一抓多旋转手爪1的下一吸盘安装板12平行于被吸取物4,机械手下降,使得吸盘13与被吸取物4接触,产生真空,被吸附物4被吸附住,同样视觉相机321检测并记录,重复上述动作,直至所有吸盘安装板12上都有被吸附物4,机械手抬高,带动一抓多旋转手爪装置一同转动到放片位或丢片位,机械手下降,气路控制元件控制破真空,将视觉装置3检测合格的被吸取物4放置在放片位,检测不合格的放置在丢片位,机械手抬高,原动机21反转,将下一吸盘13上的被吸取物4按上述动作放置在放片位或丢片位,直至将所有被吸取物4放置完成,机械手带动一抓多旋转手爪装置回到取片位,执行下一轮动作。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其他实施例中实现。因此,本发明将不会被限制于本文所述的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种用于一抓多的旋转手爪装置
- 一种用于机器人手爪的旋转机构