具有电容性压力传感器的腔内设备
文献发布时间:2023-06-19 10:18:07
技术领域
本公开涉及用于腔内压力感测导丝和/或导管的电容性压力传感器。在一些实施例中,提供了具有三个电容性单元的电容性压力传感器。
背景技术
心脏疾病是非常严重的,并且常常需要紧急手术来挽救生命。心脏疾病的主要原因是在血管内部的斑块积聚,其最终使血管闭塞。能用于打开闭塞的血管的常见处置选项包括球囊血管成形术、旋磨术和血管内支架。常规地,外科医师依靠X射线荧光透视图像,该图形是平面图像,示出了血管的管腔的轮廓的外部形状以引导处置。遗憾的是,对于X射线荧光透视图像,关于引起闭塞的狭窄的确切范围和取向存在很大的不确定性,这使得难以找到狭窄的确切位置。另外,尽管已知再狭窄能够在相同位置处发生,但是难以利用X射线检查手术之后的血管内部的状况。
用于评估血管中的狭窄的严重程度(包括引起病变的局部缺血)的当前公认技术是血流储备分数(FFR)。FFR是(在狭窄的远端侧上测量的)远端压力测量结果相对于(在狭窄的近端侧上测量的)近端压力测量结果的比率的计算。FFR提供了狭窄严重程度的指标,其允许确定阻塞是否将血管内的血流限制到需要处置的程度。健康血管中的FFR的正常值为1.00,而小于约0.80的值通常被认为是需要注意的并且需要处置。
评估血管的另一种方式是使用超声成像。例如,已经研究了由电容性微机械超声换能器(CMUT)形成的超声成像阵列。然而,由于产生不均匀性,难以制造CMUT阵列。例如,基于膜是位于阵列的中间还是位于阵列的边缘或角落处,膜的行为不同。这样的不均匀性是不能维持的,因为医学传感器需要以相同的可预测的方式工作。这些挑战阻碍了实现用于评估血管的所有电容性传感器。
发明内容
本公开的实施例涉及用于腔内导丝和/或导管的电容性压力传感器。例如,所述电容性压力传感器能够在血管内导丝中实现,并且被用于测量患者的血管内的血流的压力。所述电容性压力传感器包括两个活跃单元和一个虚设单元。所述两个活跃单元与所述电容性压力传感器的其他部件进行电通信,并且被用于测量压力。
在示例性方面中,提供一种腔内压力感测设备,包括:
柔性细长构件,其被配置为被定位在患者的体腔内;
壳体,其被耦合到所述柔性细长构件,电容性压力传感器被布置在所述壳体内;
其中,所述电容性压力传感器包括基板、第一活跃单元和第二活跃单元;
其中,所述电容性压力传感器的所述基板包括被耦合到所述壳体的近端部分和悬臂式远端部分,在所述悬臂式远端部分上定位有所述第一活跃单元和所述第二活跃单元,并且所述悬臂式远端部分通过所述壳体的开口被暴露于外部压力。所述电容性压力传感器包括:基板;在所述基板中形成的第一活跃单元;在所述基板中形成的第二活跃单元,其中,所述第一活跃单元和所述第二活跃单元是电活跃的,以生成表示外部压力的电信号。因此,所述活跃单元有利地不受可能不利地影响所述活跃单元的操作(例如,输出信号)以测量血管的管腔内的流体的压力的任何力的影响。替代地,所述活跃单元仅经受管腔内的流体的外部压力。就此而言,所述活跃单元通过所述壳体中的开口暴露于所述管腔内的流体。在操控血管内的导管期间(在导航或测量流程期间)与腔内设备的变形相关联的任何力都由所述壳体承受,而不是由所述活跃单元承受。
在实施例中,所述腔内设备还包括在所述基板的所述近端部分上形成的虚设单元,其中,所述虚设单元不提供表示所述外部压力的电信号。在一个方面中,所述第一活跃单元和所述第二活跃单元被彼此间隔开第一节距。在一个方面中,所述虚设单元与所述第一活跃单元或所述第二活跃单元中的至少一个间隔开不同的第二节距。在一个方面中,所述第一活跃单元、所述第二活跃单元和所述虚设单元沿着所述基板纵向地布置。该方面的益处在于:能够通过在测量到的压力脉冲之间的时滞来测量血管的脉搏波速度,该测量不受由于血管的弯曲而作用在所述设备上的力的影响。在一个方面中,所述第一活跃单元和所述第二活跃单元包括第一直径,并且所述虚设单元包括不同的第二直径。
在一个方面中,所述电容性压力传感器还包括被设置在所述基板中的集成电路,其中,所述集成电路与所述第一活跃单元和所述第二活跃单元通信。因此,所述集成电路有利地不受可能不利地影响所述集成电路和所述活跃单元测量管腔内的流体的压力的操作的任何力的影响。替代地,所述活跃单元和所述集成电路仅经受管腔内的流体的外部压力。在一个方面中,所述电容性压力传感器还包括:在所述基板中形成的第一接合焊盘;以及在所述基板中形成的第二接合焊盘,其中,所述第一接合焊盘和所述第二接合焊盘与所述集成电路通信。在一个方面中,所述第一活跃单元和所述第二活跃单元关于所述基板的轴对称。在一个方面中,所述基板包括具有第一尺度的近端部分和具有较小的第二尺度的远端部分,并且所述第一活跃单元和所述第二活跃单元被形成在所述远端部分中。在一个方面中,所述电容性压力传感器还包括被设置在所述基板的所述远端部分中的集成电路,其中,所述集成电路与所述第一活跃单元和所述第二活跃单元通信。
在一个方面中,所述腔内压力感测设备还包括仅第一电导体和第二电导体,其中,所述第一电导体和所述第二电导体与所述集成电路通信,其中,所述电容性压力传感器被耦合到所述柔性细长构件的远端部分,其中,所述第一电导体和所述第二电导体从所述柔性细长构件的所述远端部分延伸到所述柔性细长构件的所述近端部分,并且其中,所述第一电导体或所述第二电导体中的至少一个被配置为将表示感测到的压力的电信号从在所述柔性细长构件的所述远端部分处的所述电容性压力传感器传输到所述柔性细长构件的所述近端部分处的连接器。在一个方面中,所述腔内压力感测设备还包括在所述基板中形成的第一接合焊盘;以及在所述基板中形成的第二接合焊盘,其中,所述第一接合焊盘和所述第二接合焊盘与所述集成电路通信,并且其中,所述第一电导体和所述第二电导体分别与所述第一接合焊盘和所述第二集合焊盘通信。在一个方面中,所述腔内压力感测设备还包括被耦合到所述柔性细长构件的壳体,其中,所述电容性压力传感器被设置在所述壳体内。在一个方面中,所述电容性压力传感器的所述基板包括被耦合到所述壳体的近端部分和悬臂式远端部分,其中,所述第一活跃单元和所述第二活跃单元被形成在所述悬臂式远端部分中。在一个方面中,所述腔内压力感测设备还包括被设置在所述基板的所述悬臂式远端部分中的集成电路,其中,所述集成电路与所述第一活跃单元和所述第二活跃单元通信。在一个方面中,所述柔性细长构件包括导丝。在一个方面中,所述柔性细长构件包括导管。
在血管内设备的示例性实施例中,所述虚设单元被配置为提供基于超声的流速测量结果和/或超声成像信号。益处在于:提供了关于压力测量条件的额外信息,例如关于血管壁相对于所述压力传感器的位置有多远,或者血管中脉动流速相对于脉动血压是否存在差异,这是血管的健康状况的量度。
在所述血管内设备的另一示例性实施例中,所述集成电路与所述第一活跃单元和所述第二活跃单元的交叠的程度基本上相等。
在所述设备的又一示例性实施例中,所述第一活跃单元和所述第二活跃单元包括从所述基板垂直延伸到膜的中央支柱,并且其中,所述第一活跃单元和所述第二活跃单元具有围绕所述中央支柱的环形形式。益处在于:所述活跃单元的稳定性。
在所述设备的另外的实施例中,所述集成电路被配置为输出表示在所述第一活跃单元和所述第二活跃单元处的感测到的压力的比率的电信号。
在示例性方面中,提供了一种系统。所述系统包括根据先前公开的实施例中的任意实施例的血管内压力感测设备;以及与电容性压力传感器通信的计算机,其中,所述计算机被配置为基于表示所述外部压力的电信号来生成压力值,并且将所述压力值的视觉表示输出至显示器。
根据以下详细描述,本公开的额外方面、特征和优点将变得显而易见。
附图说明
将参考附图来描述本公开的说明性实施例,在附图中:
图1是根据本公开的实施例的腔内压力感测系统的示意性示意图。
图2是根据本公开的实施例的腔内压力感测设备的示意性俯视图。
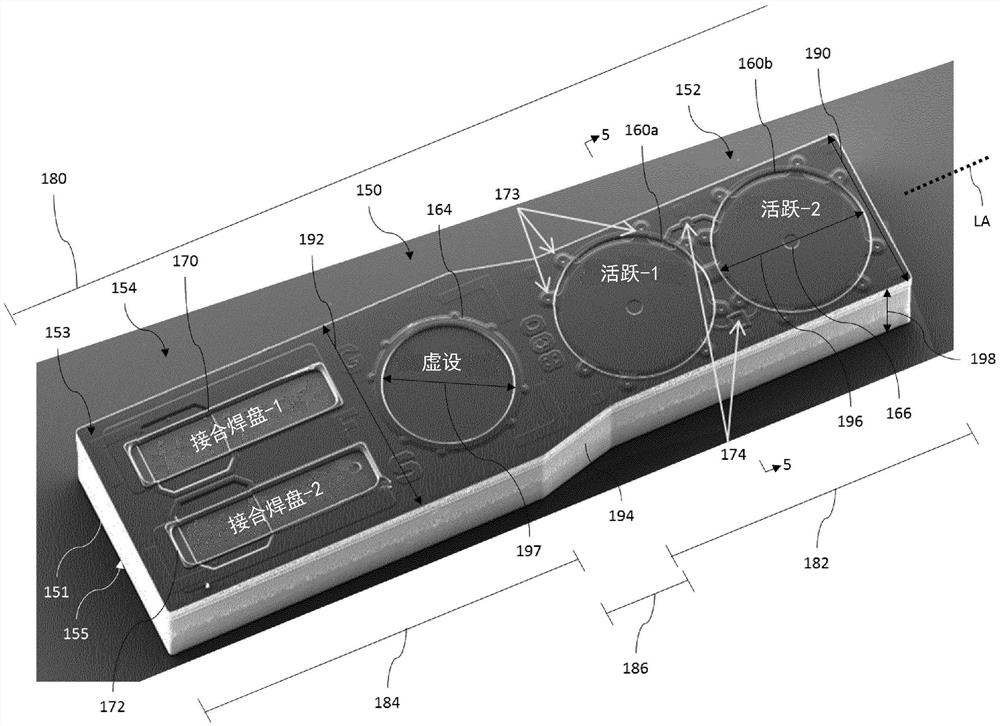
图3是根据本公开的实施例的电容性压力传感器的示意性透视图。
图4是根据本公开的实施例的被设置在腔内设备的壳体内的电容性压力传感器的示意性俯视图。
图5是根据本公开的实施例的沿着截面线5-5的图3的电容性压力传感器的示意性截面图。
图6是根据本公开的实施例的沿着截面线6-6的包括图4的电容性压力传感器的腔内设备的远端部分的示意性截面图。
图7是根据本公开的实施例的沿着截面线7-7的包括图6的电容性压力传感器的腔内设备的远端部分的示意性截面图。
图8是根据本公开的另一实施例的在电容性压力传感器的制造期间的晶片的示意性俯视图。
图9是根据本公开的另一实施例的在电容性压力传感器的制造期间的管芯的示意性俯视图。
图10是根据本公开的另一实施例的图9的管芯的区域的示意性俯视图。
图11是根据本公开的另一实施例的图10的管芯的区域的示意性俯视图。
具体实施方式
出于促进对本公开的原理的理解的目的,现在将参考在附图中所图示的实施例,并且将使用特定语言来对其进行描述。然而,应当理解,并不意图限制本公开的范围。如本公开所涉及的领域的技术人员通常将想到的,对所描述的设备、系统和方法的任何改变和进一步的修改,以及对本公开的原理的任何进一步的应用,都被充分设想到并且包括在本公开中。具体地,完全设想到的是,关于一个实施例所描述的特征、部件和/或步骤可以与关于本公开的其他实施例所描述的特征、部件和/或步骤相组合。然而,为了简洁起见,将不单独地描述这些组合的许多迭代。
现在参考图1和图2,在其中示出了根据本公开的实施例的系统100的一个或多个部件,包括腔内设备110。图1是系统100的示意性示意图。图2是腔内设备110的示意性俯视图。系统100包括腔内设备110、患者接口模块(PIM)119、计算机120和显示器125。系统100还能够被称为腔内系统、压力感测系统、诊断系统和/或其组合。通常,腔内设备110在被定位在解剖结构102内时获得与解剖结构102相关联的数据。在一些情况下,腔内设备110获得表示在腔内设备110被定位在管腔104内时在解剖结构102的管腔104内的流体流的压力的数据。例如,腔内设备110获得血管内的血流的压力数据。计算机120经由PIM 119接收所述压力数据、处理所述压力数据、并且生成由显示器125显示的压力数据的视觉表示。
腔内设备110能够是导丝、导管和/或引导导管。在一些情况下,腔内设备110能够被称为压力感测设备、压力感测导丝、压力感测导管、诊断设备和/或其组合。在图2的所图示的实施例中,腔内设备110是导丝。腔内设备110包括柔性细长构件116以及与其耦合的压力传感器150。柔性细长构件116可以是细的、长的、柔性结构,其被设定尺寸和设定形状、在结构上布置和/或以其他方式被配置为被定位在解剖结构102的管腔104内。所述柔性细长构件包括与远端113相邻的远端部分112以及与近端115相邻的近端部分114。在一些情况下,所述远端部分包括柔性细长构件116从中点到远端113的任何部分,而所述近端部分包括柔性细长构件116从中点到近端115的任何部分。所述中间部分被设置在远端部分112与近端部分114之间。在使用期间,远端部分112和大部分中间部分被定位在解剖结构102的管腔104内,同时近端部分114被定位在患者的身体的外部。柔性细长构件116能够包括纵轴LA。在一些情况下,纵轴LA能够是柔性细长构件116的中心纵轴。柔性细长构件116的全部或一部分可以具有任何合适的几何横截面轮廓(例如,圆形、卵形、矩形、正方形、椭圆形等)或非几何形状的横截面轮廓。例如,柔性细长构件116能够具有大体上圆柱形的轮廓,其具有限定柔性细长构件116的外径的圆形横截面轮廓。例如,柔性细长构件116的外径能够是用于定位在患者的体腔内的任何合适的值,包括在约0.5Fr与约15Fr之间,包括诸如0.5Fr、1Fr、1.05Fr、1.10Fr、1.5Fr、2Fr、3.5Fr、5Fr、7Fr、8.2Fr、9Fr的值和/或更大和更小的其他合适值。形成腔内设备110的部件被设定尺寸和设定形状、在结构上被布置和/或以其他方式被配置为允许柔性细长构件116的直径非常小。例如,柔性细长构件116的外径能够在约0.0007”(0.0178mm)与约0.118”(3.0mm)之间,其中,一些特定实施例具有大约0.014”(0.3556mm)和大约0.018”(0.4572mm)的外径。尽管柔性细长构件116的总长度能够是任何长度,但是在一些实施例中,总长度在约1300mm与约4000mm之间,其中,在一些特定实施例中,其长度为1400mm、1750mm、1850mm、1900mm和3000mm。
在一些情况下,柔性细长构件116能够是管状的。腔内设备110可以包括或者可以不包括沿着柔性细长构件116的全部或部分长度延伸的一个或多个管腔。形成腔内设备110的一个或多个部件能够被定位在柔性细长构件116的一个或多个管腔中。柔性细长构件116的管腔能够被设定尺寸和设定形状、在结构上被布置和/或以其他方式被配置为接收和/或引导一个或多个其他诊断和/或处置仪器。如果柔性细长构件116包括(一个或多个)管腔,则所述(一个或多个)管腔可以相对于腔内设备110的横截面轮廓居中或偏移。腔内设备110能够是包括被配置为容纳导丝的管腔的导管。在诊断和/或处置流程期间,医学专家通常首先将导丝插入到体腔中并且将导丝移动到解剖结构内的期望位置。所述导丝促进在解剖结构内的期望位置处引入和定位诸如导管的一种或多种其他诊断和/或处置仪器。在一些实施例中,腔内设备110的管腔能够沿着柔性细长构件116的整个长度或部分长度延伸。
柔性细长构件116能够包括由不同材料形成的任何合适的部件。如图2所示的,柔性细长构件116包括芯线136a、136b,芯线136a、136b提供用于腔内设备110的内部结构。在各种实施例中,芯线136a、136b能够由金属或金属合金形成。芯线136a、136b的直径能够沿着所述柔性细长构件的长度相同或变化。芯线136a、136b能够通过海波管(hypotube)121内的粘合剂、焊料和/或其他附接机构耦合,海波管121还形成柔性细长构件的部分。芯线136a沿着柔性细长构件116的远端部分112和/或中间部分延伸,而芯线136b沿着近端部分延伸。在其他实施例中,所述腔内设备仅包括一根芯线。柔性细长构件116能够包括围绕芯线136a、136b的一个或多个聚合物或塑料层和/或涂层。柔性细长构件116的远端部分包括线圈123,并且在远端113处终止于焊球中。
解剖结构102可以表示自然的和人造的任何流体填充或包围的结构。例如,解剖结构102能够在患者的身体内。流体能够流动通过解剖结构102的管腔104。在一些情况下,管腔104能够被称为体腔。解剖结构102能够是脉管,诸如血管,血液在其中流动通过管腔104。在这样的情况下,腔内设备110能够被称为血管内设备。在各种实施例中,所述血管是患者的脉管系统的动脉或静脉,包括心脏脉管系统、外周脉管系统、神经脉管系统、肾脉管系统和/或身体内的任何其他合适的解剖结构/管腔。在一些情况下,解剖结构102能够是弯曲的。例如,腔内设备110可以被用于检查任何数量的解剖位置和组织类型,包括但不限于:器官,包括肝脏、心脏、肾脏、胆囊、胰腺、肺、食道;管道;肠;神经系统结构,包括大脑、硬膜囊、脊髓和周围神经;尿路;以及在血液、心脏腔室或其他部位和/或身体的其他系统内的瓣膜。除了自然结构外,腔内设备110可以被用于检查人造结构,诸如但不限于:心脏瓣膜、支架、分流器、过滤器和其他设备。本公开的实施例特别适合在人体解剖学的上下文中使用。在一些方面,本公开内容能够通常用于解剖结构或非解剖结构的管腔中,包括医学应用和非医学应用两者。
解剖结构102的闭塞106通常表示导致例如以对患者的健康有害的方式限制流体通过管腔104的任何阻塞或其他结构布置。例如,闭塞106使管腔104变窄,使得管腔104的横截面面积和/或流体流动通过管腔104的可用空间减小。在解剖结构102是血管的情况下,闭塞106可以是斑块积聚的结果,包括但不限于斑块成分,诸如纤维、纤维-脂质(纤维脂肪)、坏死核心、钙化(密集钙)、血液、新鲜血栓和/或成熟的血栓。在一些情况下,闭塞106能够被称为血栓、狭窄和/或病变。通常,闭塞106的组成将取决于被评估的解剖结构的类型。解剖结构102的更健康的部分可以具有均匀或对称的轮廓(例如,具有圆形横截面轮廓的圆柱形轮廓)。闭塞106可以不具有均匀或对称的轮廓。因此,具有闭塞106的解剖结构102的患病部分将具有非对称和/或以其他方式不规则的轮廓。尽管在图1中将解剖结构102图示为具有单个闭塞106,但是应当理解,在本文中所描述的设备、系统和方法对于具有多个闭塞的解剖结构具有相似的应用。
腔内设备110包括被耦合到柔性细长构件116的压力传感器150。如在本文中所描述的,压力传感器150能够是电容性压力传感器。压力传感器150能够被直接或间接地耦合到柔性细长构件116的远端部分112,在远端113的近端。在一些情况下,压力传感器150被定位为距远端113小于10cm、小于5cm或小于3cm。压力传感器150被配置为感测管腔104内的外部压力,诸如与管腔104内的流体流相关的外部压力。压力传感器150生成表示外部压力的电信号并且经由导体140、142传输电信号。导体140、142能够个体地或统称为电导体、电线、电缆等。导体140、142的远端部分被机械地和/或电学地耦合到压力传感器150。如在本文中所描述的,在一些情况下,电子电路能够被耦合到和/或集成在柔性细长构件116的远端部分112中,诸如与压力传感器150相邻、在其近侧和/或集成在压力传感器150中。所述电子电路能够处理由传感器生成的电信号,并且输出表示感测到的压力的电信号。所述电信号在远端部分112处从压力传感器150传输到柔性细长构件116的近端部分114。导体140、142沿着柔性细长构件116的长度从远端部分112延伸到近端部分114。导体140、142能够将电信号从PIM 119和/或计算机120载送到压力传感器150。被传输到压力传感器150的电信号能够是电力以激活和操作压力传感器150,和/或是控制信号以控制压力传感器150的操作。
在一些实施例中,腔内设备110仅包括两个导体140、142。在一些情况下,两个导体140、142能够被称为双股电缆。与大量导体相比,仅使用两个导体140、142有利地最小化了腔内设备110内的导体所占据的空间量。通过仅使用两个导体140、142可用的腔内设备110内的空间能够被有利地用于腔内设备110的其他部件,诸如通过使一些部件变大或者添加提供不同功能的部件同时保持腔内设备110的相同外径。在其他情况下,能够使腔内设备110的外径更小。在其他实施例中,任何数量的导体能够在连接器117与压力传感器150之间沿着柔性细长构件116的长度延伸,包括一到十之间的导体。应当理解,导体140、142的一些部分或长度可以是裸露的,而导体140、142的其他部分可以是绝缘和/或屏蔽的。例如,导体140、142的远端和近端能够是裸露的,以允许与其他部件进行机械和/或电气互连(例如,通过焊接)。如在图2的所图示的实施例中所示的,导体140、142能够沿着柔性细长构件的长度的(一个或多个)部分线性地延伸,并且沿着其他部分呈旋涡或螺旋配置(例如,围绕芯线136a)延伸。
尽管提到了电信号,但是应当理解,表示被施加在压力传感器150上的外部压力的信号能够是任何合适的信号类型,诸如光信号、射频信号等。代替或除了导体140、142之外,能够在腔内设备110中实现有线或无线的任何合适的通信路径或通信线路,包括光纤、光纤电缆、经由集成在和/或耦合到柔性细长构件116的远端部分112或近端部分114中的天线的无线传输等。通常,压力传感器150能够是任何合适的功能设备,诸如一个或多个电子、光学或电光部件。例如,所述功能设备能够是压力传感器、流量传感器(速度和/或体积)、温度传感器、成像元件、光纤、超声换能器、反射器、镜子、棱镜、光学相干断层成像(OCT)元件、消融元件、RF电极、导体和/或其组合。
腔内设备110包括在柔性细长构件116的近端部分114处或附近的连接器117。在一些情况下,连接器117形成柔性细长构件116的近端115的部分。例如,如在图2中所示的,能够将近端115设定形状为促进柔性细长构件与连接器118的对准和连接的特征。在其他情况下,连接器117与柔性细长构件116的近端115间隔开。连接器117被配置为促进在腔内设备110与另一设备之间的通信。更具体而言,连接器117被配置为促进由压力传感器150获得的数据向另一设备(诸如PIM 119和/或计算机120)的通信。因此,在一些实施例中,连接器117是电连接器,其提供到导体140、142的电连接。导体140的近端部分被电气和/或机械地连接到连接器117。例如,如在图2中所示的,连接器117包括一个或多个导电连接器段111,其包围柔性细长构件116。连接器段111能够是由金属或金属合金形成的环,或者能够是导电墨水。每个导体140、142能够被直接或间接地与相应的连接器段111通信。例如,柔性细长构件116能够包括被嵌入在近端部分114处的聚合物层中的导电带141。每个导体140、142能够被直接与相应的导电带141通信,导电带141继而直接与相应的连接器段111通信。在其他实施例中,连接器117是光学连接器和/或其他合适的有线或无线通信路径。在一些情况下,连接器117被配置为直接或间接地提供与另一设备的物理连接。在其他情况下,连接器117被配置为促进在腔内设备110与另一设备之间的无线通信。在又其他情况下,连接器117促进到另一设备的物理连接和无线连接两者。在一些情况下,连接器117是在一些情况下被固定至柔性细长构件116的单独部件。在其他情况下,连接器117被一体地形成为柔性细长构件116的部分。
腔内设备110能够包括壳体130,在其中布置有压力传感器150。在一些实施例中,壳体130能够被称为传感器壳体。壳体130包括开口132,开口132将压力传感器150暴露于解剖结构102的管腔104内的流体。壳体130被耦合到柔性细长构件116。例如,壳体130能够被直接或间接地耦合到柔性细长构件116的远端部分112,在远端113的近端。在一些情况下,所述壳体被定位在距远端尖端105小于10cm、小于5cm或小于3cm。壳体130能够是由任何合适的材料(诸如金属、金属合金、塑料和/或聚合物)形成的结构。在一些情况下,所述壳体是在一些情况下被固定到柔性细长构件116的单独部件。在其他情况下,所述壳体被一体地形成为柔性细长构件116的部分。壳体130能够是管状结构,其包括管腔,在其中定位有包括压力传感器150的一个或多个部件。
系统100能够包括连接器118,连接器118被可移除地耦合到腔内设备110。例如,连接器118能够在压力感测流程开始时在柔性细长构件116的近端部分114处机械和/或电气连接到连接器117,并且在所述流程结束时断开连接。连接器118能够促进在腔内设备110(例如,经由导体140、142和连接器117的压力传感器150)与另一设备(诸如PIM 119和计算机120)之间的数据通信。例如,连接器118能够与PIM 119直接通信。因此,在一些实施例中,连接器117是电连接器,其提供与腔内设备110的连接器117的电连接。在其他实施例中,连接器118是光学连接器和/或其他合适的有线或无线通信路径。在一些情况下,连接器118被配置为直接或间接地提供与另一设备的物理连接。
系统100的PIM 119包括与去往和来自压力传感器150和计算机120的信号相关联的电子电路。就此而言,PIM 119被通信地耦合到腔内设备110和计算机120。例如,PIM 119能够执行对从压力传感器150接收到的电信号的处理。PIM 119能够从PIM本身和/或计算机120向压力传感器150发送功率信号和/或控制信号。在一些情况下,PIM 119能够包括一个或多个处理器和存储器,以实现与去往和来自压力传感器150和计算机120的信号相关的硬件和/或软件。在一些情况下,系统100不包括PIM 119,并且腔内设备110在没有PIM 119的情况下与计算机120通信。
计算机120被通信地耦合到PIM 119和/或腔内设备110(例如,压力传感器150和/或集成在压力传感器150和/或柔性细长构件116中的电子电路)。计算机120通常表示适于处理和分析压力传感器150获得的数据和/或控制压力传感器150的操作的任何一个或多个计算设备。计算机120包括与任何适当的存储器124通信的一个或多个处理器122。在一些情况下,存储器124能够被称为非瞬态计算机可读存储介质。应当理解,与本公开的数据获取、数据处理、仪器控制和/或其他处理或控制方面有关的任何步骤可以由计算机120使用被存储于存储器124上或存储器124中并且由处理器122执行的对应指令来实现。在一些情况下,计算机120是控制台设备。在一些情况下,计算机120是便携式的(例如,手持式、在推车上等)。
通常,计算机120被配置为从压力传感器150接收表示解剖结构102的管腔104内的感测到的压力的电信号。计算机120处理所述电信号以生成压力值。所述压力值能够是在管腔104内的感测到的压力。在一些情况下,所述压力值能够是由计算机120基于感测到的压力计算出的压力比,诸如血流储备分数(FFR)值、瞬时无波比率(iFR)值、Pd/Pa(远端压力/主动脉压力)值和/或其他压力比率值。计算机120能够与另一压力传感器(诸如主动脉压力传感器、压力感测导丝或压力感测导管)通信。计算机120能够基于来自压力传感器150的感测到的压力和来自另一压力传感器的感测到的压力来计算压力比。计算机120基于所述压力值生成视觉表示,并且将所述视觉表示输出到显示器125。所述视觉表示能够包括感测到的压力和/或计算出的压力比的数值、符号、曲线图、图形、图表、图像和/或其他合适的图形表示。显示器125能够是任何合适的监视器(诸如独立设备),或者能够被集成在计算机120的壳体中。
现在参考图3和图4,在其中示出了根据本公开的实施例的压力传感器150。图3是压力传感器150的示意性透视图。例如,图3是压力传感器150的扫描电子显微镜(SEM)图像(例如,在制造期间将压力传感器150分离之后)。图4是被设置在壳体130内的压力传感器150的示意性俯视图。在所图示的实施例中,压力传感器150是电容性压力传感器。压力传感器150包括被形成在基板151中的三个电容性单元:两个活跃单元160a、160b和虚设单元164。活跃单元160a、160b是电活跃的,以生成表示通过在解剖结构102的管腔104内的流体而施加到压力传感器150的外部压力的电信号。虚设单元164是非电活跃的,从而不生成表示外部压力的电信号。在示例性实施例中,每个压力传感器150仅包括三个电容性单元:两个活跃单元160a、160b和虚设单元164。在一些实施例中,压力传感器150能够被称为微机电系统(MEMS)压力传感器。就此而言,压力传感器150的部件(诸如活跃单元160a、160b,虚设单元164和集成电路200)能够根据半导体工艺(例如,类似于用于制造电容微机械超声换能器或CMUT的工艺)来形成。在结构上,活跃单元160a、160b和虚设单元164是根据相同工艺形成的相似或相同的电容性单元。活跃单元160a、160b与虚设单元164的不同之处在于:其被电连接到压力传感器150的其他部件和/或以其他方式与压力传感器150的其他部件通信(例如,被设置在活跃单元160a下方的基板151中的集成电路200),而压力传感器150不包括与虚设单元164的任何电连接。在其他实施例中,虚设单元164是电活跃的、被电连接并且生成电信号。在这样的实施例中,虚设单元164能够被用于压力感测、流量感测(速度和/或体积)、温度感测、超声换能(例如,发射超声能量和/或接收从解剖结构反射的超声回波,诸如用于超声成像)和/或其他合适的用途。
活跃单元160a、160b包括尺度196,其可以是直径。在一些实施例中,尺度196能够在大约100μm与大约170μm之间、在大约120μm与大约150μm之间、和/或在大约130μm与140μm之间,包括诸如130μm、133μm、135μm、137μm、140μm的值和/或更大和更小的其他合适的值。活跃单元160a、160b的尺度196能够彼此相等。通常,活动单元160a、160b的结构是相同的,从而活动单元160a、160b在外部压力的影响下的行为是相同的。在其他实施例中,活跃单元160a、160b的尺寸、形状和/或其他结构方面彼此不同。活跃单元160a、160b的尺度196可以不同于虚拟单元164的对应尺度197,诸如直径。例如,虚拟单元164的尺度197可以小于活跃单元160a、160b的尺度196。在一些实施例中,尺度197能够在大约100μm与大约170μm之间、在大约120μm与大约150μm之间、和/或在大约130μm与140μm之间,包括诸如127μm、130μm、133μm、135μm、137μm的值和/或更大和更小的其他合适的值。在其他实施例中,活跃单元160a、160b的尺度196等于虚设单元164的尺度197。
基板151包括在其上形成有活跃单元160a、160b、虚设单元164以及接合焊盘170、172的表面153和相对表面155。如在图4中所示的,压力传感器150被布置在壳体130内,从而活跃单元160a、160b和虚设单元164朝向壳体130中的开口132定向。例如,基板151的表面153面对开口132。以这种方式,压力传感器150(例如,活跃单元160a、160b)被暴露于管腔104内的流体流的外部压力。粘合剂和/或灌封材料171能够在压力传感器150的近端部分154上方被定位在壳体130内,以覆盖在导体140、142的远端与接合焊盘170、172之间的焊接连接。
在所图示的实施例中,活跃单元160a、160b和虚设单元164沿着压力传感器150和/或基板151纵向地布置。例如,活跃单元160a、160b和虚设单元164被设置在基板151中沿着压力传感器150的尺度180(诸如长度)和/或沿着纵轴LA彼此相邻或接近。活跃单元160a、160b和虚设单元164能够被布置成一行。例如,当纵轴LA是压力传感器150的中央纵轴时,活跃单元160a、160b和虚设单元164的中点沿着中央纵轴来设置。在其他实施例中,活跃单元160a、160b和虚设单元164以不同的配置来布置。例如,活跃单元160a、160b和虚设单元164中的一个或多个被并排地横向地定位和/或横向地彼此偏移或者与中心纵轴偏移。
压力传感器150和/或基板151包括远端部分152和近端部分154。活跃单元160a、160b能够被形成在远端部分152处。接合焊盘170、172能够被形成在基板151中在近端部分154处。接合焊盘170、172沿着压力传感器150和/或基板151沿纵向延伸。接合焊盘170、172在所图示的实施例中在与纵轴LA垂直的方向(例如,压力传感器150和/或基板151的横向尺度)横向地并排布置。设想到了在不同实施例中用于接合焊盘170、172的不同配置。接合焊盘170、172包括由于在基板151中形成的导电迹线或其他导电信号路径而与活跃单元160a、160b直接或间接地通信的导电材料。例如,接合焊盘170、172能够与集成电路200通信。导体140、142的远端分别机械和/或电耦合到接合焊盘170、172,由此在导体140、142与活跃单元160a、160b之间建立电通信。例如,将导体140、142的远端分别焊接到接合焊盘170、172,由此在导体140、142与接合焊盘172之间机械地耦合并且建立通信。接合焊盘170、172的尺度(例如,长度和宽度)为导体140、142和焊料提供了空间。虚设单元164能够被至少部分地定位在近端部分154中和/或定位在远端部分152与近端部分154之间的中间部分中。
基板151被形成为任何合适的尺寸和形状,使得压力传感器150能够在腔内设备110中实现。就此而言,基板151被设定尺寸和设定形状、在结构上被布置和/或以其他方式被配置为设置在壳体130内、被耦合到腔内设备110和/或被定位在解剖结构102的管腔104内。在所图示的实施例中,压力传感器150和/或基板151被形成为瓶形,其中,远端部分152是瓶颈,近端部分154是瓶体,而在远端部分152与近端部分154之间的过渡部分194是瓶子的肩部。在其他实施例中,压力传感器150被形成为任何合适的几何或非几何形状。基板151能够是任何合适的半导体材料,诸如硅(Si)基板或锗(Ge)基板。在一些实施例中,基板151可以包括化合物半导体,诸如碳化硅(SiC)、硅锗(SiGe)、碳化硅锗(SiGeC)。在一些实现方式中,基板151可以是绝缘体上硅(SOI)基板。
如在图3中所示的,压力传感器150的基板151包括尺度180,其可以是基板151的长度。在一些实施例中,尺度180能够在大约500μm与大约1000μm之间、在大约700μm与大约800μm之间、和/或在大约725μm和775μm之间,包括诸如700μm、725μm、740μm、750μm、760μm、775μm、800μm的值和/或更大和更小的其他合适的值。基板151包括尺度198,其可以是基板151的厚度或深度。在一些实施例中,尺度198能够在大约50μm与大约100μm之间、在大约60μm与大约80μm之间、和/或在大约65μm与75μm之间,包括诸如60μm、65μm、68μm、70μm、72μm、75μm、80μm的值,和/或更大和更小的其他合适的值。尺度198能够沿着基板151的整个长度是恒定的,或者能够平滑地或急剧地变化(例如,在远端部分152、近端部分154和/或过渡部分194中的不同的尺度198)。
基板151的远侧部分152包括尺度190,其可以是远侧部分152的宽度。在一些实施例中,尺度190能够在大约120μm与大约200μm之间、在大约140μm与大约180μm之间、和/或在大约155μm与165μm之间,包括诸如150μm、155μm、158μm、160μm、162μm、165μm、170μm的值,和/或更大和更小的其他合适的值。基板151的近端部分154包括尺度192,其可以是近端部分154的宽度。在一些实施例中,尺度192能够在大约150μm与大约250μm之间、在大约175μm与大约225μm之间、和/或在大约190μm与210μm之间,包括诸如190μm、195μm、198μm、200μm、202μm、205μm、210μm的值,和/或更大或更小的其他合适的值。在一些实施例中,远端部分152的尺度190小于近端部分154的对应尺度192。例如,近端部分154比远端部分152更宽。过渡部分194从近端部分154的较大尺度192过渡到远端部分152的较小尺度190。在所图示的实施例中,过渡部分194是线性的。在其他实施例中,过渡部分194可以是弯曲的。
基板151的远端部分152包括尺度182,其可以是远端部分152的长度。在一些实施例中,尺度182能够在大约250μm与大约350μm之间和/或在大约375μm与大约425μm之间,包括诸如290μm、300μm、302μm、310μm的值,和/或更大和更小的其他合适的值。基板151的近端部分154包括尺度184,其可以是近端部分154的长度。在一些实施例中,尺度184能够在大约340μm与大约400μm之间和/或在大约350μm与大约390μm之间,包括诸如360μm、370μm、373μm、380μm的值,和/或更大或更小的其他合适的值。基板151的过渡部分194包括尺度186,其可以是过渡部分194的长度。在一些实施例中,尺度186能够在大约25μm与大约100μm之间和/或在大约60μm与大约90μm之间,包括诸如70μm、80μm、90μm的值,和/或更大和更小的其他合适的值。
现在参考图5,在其中示出了根据本公开的实施例的沿着图3中的剖面线5-5的压力传感器150示意性截面图。压力传感器150包括被电耦合到活跃单元160a、160b的集成电路200。活跃单元160a包括被设置于在基板151中形成的腔161上方的膜168。所述腔能够具有尺度163(诸如高度),其在大约300nm与大约400nm之间,包括诸如325nm、350nm、375nm的值,和/或更大和更小的其他合适的值。在示例性实施例中,尺度163的公差能够是±25nm。尽管在图5中仅图示了活跃单元160a、但是应当理解,活跃单元160b能够具有相同的结构和功能。
活跃单元160a、160b的基本原理是在腔161的基底165处在膜168和基板151中提供的电极之间的平行板电容器。电极固定在基底165处,而膜168和/或膜168中的电极响应于被施加给压力传感器150的外部压力而移动。活跃单元160a、160b发送表示由于膜168的移动导致的电容变化的电信号。集成电路200接收由活跃单元160a、160b输出的电信号。集成电路200、PIM 119和/或计算机120使用所述电信号来测量在解剖结构102的管腔104内的流体流的压力。在示例性实施例中,活跃单元160a、160b被并联电连接到彼此,从而将由活跃单元160a、160b测量到的各个电容相加(例如,C
如在图3中所示的,压力传感器150包括通孔174,通孔174提供了用于在活跃单元160a、160b与集成电路200之间的电信号的通信路径。在一些情况下,集成电路200能够被称为电子电路。集成电路200能够包括被配置为处理由活跃单元160a、160b输出的电信号的任何合适的电子件。例如,集成电路200能够是专用集成电路(ASIC)。集成电路200还能够被配置为将电信号(例如,功率信号和/或控制信号)提供给活跃单元160a、160b。
集成电路200直接或间接与导体140、142通信。例如,集成电路200经由接合焊盘170、172、导电迹线和/或在基板151中形成的其他导电信号路径电耦合到导体140、142。就此而言,接合焊盘170、172被电耦合到集成电路200。集成电路200经由导体140、142中的至少一个来传输电信号。集成电路200被配置为输出表示在活动单元160、160b处感测到的压力的电信号。在示例性实施例中,集成电路200输出交流(AC)信号。就此而言,导体140、142中的一个能够电接地(例如,0V),并且另一导体能够载送向活跃单元160a、160b和/或集成电路200提供电力的电信号(任何合适的电压,诸如2.5V、3.0V和/或更大和更小的其他值)。电源电压能够由PIM 119和/或计算机120传输到压力传感器150。在示例性实施例中,集成电路200通常能够表现为与
集成电路200被设置在基板151中。例如,集成电路200能够被设置在基板151的远端部分152中。在所图示的实施例中,集成电路200被基板151完全包围。在其他实施例中,集成电路200能够在表面153或表面155处被设置在基板151中。例如,集成电路200的表面能够与表面153或表面155连续地延伸。压力传感器150可以仅包括一个集成电路200,其可以被设置在活跃单元160a和/或活跃单元160b下方的基板151中。在示例性实施例中,集成电路200被设定尺寸和设定形状,使得其被部分地定位在每个活跃单元160a、160b和在活跃单元160a、160b之间的区域下方。集成电路200能够被对称地设置在活跃单元160a、160b下方。在这方面,集成电路200具有与活跃单元160a、160b之间的中点共同定位的中点。例如,如在图4和图6中所示的,集成电路200的近端部分和远端部分能够在纵向上与活跃单元160、160b相等地交叠。例如,相对于在图4中所示的取向,集成电路200的顶部边缘和底部边缘能够与基板151的远端部分152的顶部边缘和底部边缘相等地间隔。集成电路200能够是任何合适的几何或非几何形状。例如,集成电路200能够是矩形棱镜。在一些实施例中,压力传感器150包括两个或更多个集成电路200。在一些实施例中,压力传感器150在横向或纵向上与活跃单元160a、160b中的至少一个相邻。
集成电路200包括尺度203,诸如集成电路200的宽度。在一些实施例中,尺度203能够在大约50μm与大约60μm之间,包括诸如53μm、55μm、57μm的值,和/或更大和更小的其他合适的值。在这样的实施例中,集成电路203的尺度203能够小于活跃单元160a的尺度196。在这方面,活跃单元160的尺度196能够是腔161的宽度或直径。集成电路200包括尺度205,诸如集成电路200的高度。在一些实施例中,尺度205能够在大约5μm与大约25μm之间和/或在大约10μm与大约20μm之间,包括诸如10μm、15μm、20μm的值,和/或更大和更小的其他合适的值。在示例性实施例中,集成电路203的尺度205大于腔161的尺度163。集成电路200的尺度207(图6)(诸如长度(例如,沿着纵轴LA))能够在大约130μm与大约160μm之间和/或在大约140μm与大约145μm之间,包括诸如141μm、143μm、144μm、145μm的值,和/或更大和更小的其他合适的值。
再次参考图3,基板151包括围绕活跃单元160a、160b的蚀刻孔173,其是由用于形成活跃单元160a、160b的半导体工艺产生的。蚀刻孔173被用于创建在图5中所图示的腔161的牺牲蚀刻工艺中。在牺牲蚀刻之后,膜168是自由悬挂的并且仅在其边缘处被支撑。下一步是沉积塞层,所述塞层关闭蚀刻孔173并且密封腔161。必须排空腔161以创建能够测量压力的活跃单元160a、160b。因为在示例性实施例中不使用虚设单元164来测量压力,所以不需要为虚设单元164排空腔。从虚设单元164省略蚀刻孔173会存在多种原因。膜168松动的风险很小。虚设单元164的腔的开口会产生一些问题,例如,如果在临床流程期间自由悬挂的膜破裂/损坏,则在血管中在体内释放颗粒。因为活跃单元160a、160b与其他部件电通信,所以能够经由由压力传感器150输出的电信号来电检测活跃单元160a、160b的膜168的任何破裂。与活跃单元160a、160b不同,因为虚设单元164不与其他部件电通信,所以不能够电检测虚设单元164的膜168的破裂。会更安全的是,虚设单元164的膜168不是自由悬挂的。通过省略蚀刻孔173,能够有利地防止无法检测或难以检测的体内颗粒释放。在示例性方面中,发明人已经发现,当不为虚设单元164排空腔时,产率会有利地提高。由于对沉积、光刻和蚀刻的主要邻近效应与蚀刻孔173的存在无关,因此能够为虚设单元164省略蚀刻孔173。在一些实施例中,虚设单元164的腔被排空,并且虚设单元164包括蚀刻孔173。
现在参考图6和图7,在其中示出了腔内设备110的远端部分112。图6是沿着图4中的截面线6-6的示意性截面图。图7是沿图6中的截面线的示意性截面图。图6和图7图示了被设置在壳体130内的压力传感器150。壳体130包括被设置在壳体130内的底座134。在一些情况下,底座134能够被称为传感器底座。底座134是被配置为支撑和/或成为针对腔内设备110的其他部件(例如,压力传感器150)的耦合点的任何合适的结构。底座134能够是由任何合适的材料形成的结构,诸如金属、金属合金、塑料和/或聚合物。底座134能够使用例如粘合剂137机械地耦合到壳体130。芯线136能够纵向地延伸通过壳体130和/或底座134。例如,壳体130和/或底座134能够至少部分地围绕芯线135。芯线135能够使用例如粘合剂137机械地耦合到底座134和/或壳体130。
压力传感器150的近端部分154能够被耦合到底座134。通常,近端部分154能够直接或间接地耦合到底座134和/或底座134被定位在其中的壳体130。通常,在各部件之间的机械耦合、附接、连接和/或固定能够包括直接或间接紧固,其中,一个或多个其他部件被设置在耦合的部件之间。例如,能够使用粘合剂、机械紧固件、焊接和/或其他合适的附件来机械地耦合部件。虚设单元164能够被主要设置在近端部分154中。图6示出了导体140,其被电和/或机械耦合到近端部分154处的压力传感器150,例如,在接合焊盘170处。
压力传感器150的远端部分152是悬臂式的,在压力传感器150与底座134之间具有间隙138。由于其是悬臂式的,因此远端部分152有利地与由腔内设备110导航解剖结构102产生的、由腔内设备110、壳体130和/或底座134所经受的任何力隔离(例如,腔内设备110、壳体130和/或底座134的变形是由于曲折的脉管系统中的弯曲或者在穿过闭塞106时接触组织引起的)。远端部分152还有利地与在腔内设备110的组装期间(诸如当近端部分154被耦合到底座134时)由压力传感器150经受的任何力隔离。在所图示的实施例中,活跃单元160a、160b和集成电路200被设置在悬臂式远端部分152内。因此,活跃单元160a、160b和集成电路200有利地不受可能不利地影响活跃单元160a、160b和集成电路200测量管腔104内的流体的压力的操作(例如,输出信号)的任何力的影响。替代地,活跃单元160a、160b仅经受管腔104内的流体的外部压力。就此而言,活跃单元160a、160b通过壳体130中的开口132被暴露于管腔104内的流体。与腔内设备110、壳体130和/或底座134的变形相关联的任何力由虚设单元164经受,所述虚设单元是非电活跃的并且不参与测量压力。
现在参考图8和图9,在其中示出了在制造压力传感器150期间的结构。图8是根据本公开的实施例的晶片300的示意性俯视图。图9是根据本公开的实施例的管芯310的示意性俯视图。在图8的晶片300中指示了示例性管芯310。晶片300是半导体材料的薄切片。就此而言,压力传感器150的基板151是晶片300的部分。晶片300能够具有任何合适的直径,诸如6”、8”、12”和/或更大和更小的其他合适的值。晶片300包括任何适当数量的管芯310。例如,在所图示的实施例中,晶片300包括五十六个管芯310。在示例性实施例中,在每个管芯310上制造大约一千个压力传感器150。
现在参考图10和图11,在其中示出了包括一个或多个压力传感器150(例如,压力传感器150a、150b和/或150c)的管芯310的部分的示意性俯视图。图10图示了在图9中所指示的管芯310的示例性区域。图11图示了在图10中所指示的管芯310的示例性区域。图10和图11图示了在沿边界312分离压力传感器150之前的制造阶段期间的压力传感器150。在示例性实施例中,制造过程包括沿着边界312的深反应离子蚀刻(DRIE)以限定基板151的尺寸和形状并且分离压力传感器150。在各种实施例中能够利用其他合适的蚀刻、切块、研磨、薄化、抛光和/或切割技术。如在本文中所描述的,每个压力传感器150包括活跃单元160a、160b和接合焊盘170、172。
如在图10和图11中所示的,每个管芯310有利地包括密集布置的电容性单元,所述电容性单元包括活跃单元160a、160b和虚设单元164a、164b、164c、164d。活跃单元160a、160b和虚设单元164a被形成在压力传感器150的边界312内的管芯310中。虚设单元164b、164c、164d被形成在边界312外部的管芯310中。虚设单元164a、164b、164c、164d的直径能够彼此相同或不同。虚设单元164a、164b、164d的直径能够彼此相等。在所图示的实施例中,虚设单元164c的直径小于虚设单元164a、164b、164d的直径。虚设单元164c的较小直径有利地允许其被定位成彼此更靠近并且更靠近活跃单元160a、160b。虚设单元164a、164b、164c、164d通常具有与活跃单元160a、160b相似的尺度,但是虚设单元164a、164b、164c、164d的尺度能够不同以提供更优选的布局。虚设单元164a、164b、164c、164d通常尽可能好地类似于活跃单元160a、160b。针对DRIE的边界312的存在防止了一个或多个虚设单元164a、164b、164c、164d具有与活跃单元160a、160b相同的尺度。在示例性实施例中,直径能够从虚设单元164c的90μm变化到虚设单元164a、164b和/或164d的133μm。
就此而言,虚设单元164a、164b、164c、164d围绕活跃单元160a、160b。虚设单元164c被定位在管芯310中的每对活跃单元160a、160b的上方和下方。虚设单元164a被定位到活跃单元160a、160b的左侧。虚设单元164b被定位到活跃单元160a、160b的右侧。虚设单元164d被定位在活跃单元160a、160b的对角线上。参考图10中的部件的取向和布置,使用诸如上、下、左、右和对角线之类的方向描述。应当理解,能够将不同的方向描述与不同的取向和布置一起使用。虚设单元164a、164b、164c、164d能够以栅格状图案布置在活跃单元160a、160b周围。虚设单元164d被设置在管芯310中的垂直间隔的压力传感器之间(例如,在图10中的压力传感器150a与压力传感器150b之间)。虚设单元164b被设置在管芯310中横向地间隔开的压力传感器之间(例如,在图10中的压力传感器150a与压力传感器150a的左侧和右侧的压力传感器之间)。
在管芯310中的电容性单元的密集布置有利地确保了活跃单元160a、160b中的均匀性。例如,彼此相比,压力传感器150a的活跃单元160a和活跃单元160b对解剖结构102的管腔104内的流体的外部压力相似地或相同地响应。类似地,压力传感器150a的活跃单元160a、160b和压力传感器150b、150c中的那些对管腔104内的流体的外部压力相似地或相同地响应。另外地,压力传感器150的活跃单元160a、160b和在不同管芯310和/或不同晶片300上制造的压力传感器的那些对管腔104内的流体的外部压力的相似或相同地响应。此外,压力传感器150的活跃单元160a、160b和在不同批次(例如,在不同时间、在不同晶片300上)制造的压力传感器的那些对管腔104内的流体的外部压力相似地或相同地响应。结果,感测到的压力跨同一批次中的所有活动单元160a、160b和不同批次中的活动单元是不一致的。
产生电容性压力传感器的挑战之一是从一个MEMS批次到另一MEMS批次具有相同传感器灵敏度的制造方法的再现性。众所周知,在CMUT阵列的边缘处的电容性单元的膜经受不均匀性,使得边缘和角的膜由于处理不均匀性而具有不同的机械性能。本公开通过在晶片300和/或管芯310内提供电容性单元的空间紧凑分布而有利地解决了该挑战。通过在活跃单元160a、160b之间和周围包括虚设单元164a、164b、164c、164d来使这种密集布置成为可能。例如,虚设单元164a、164b、164c、164d的分布均匀地围绕活跃单元160a、160b。这种布置消除了活跃单元160a、160b被定位在管芯310和/或晶片300的边缘或角处(在这些地方出现处理不均匀性)的可能性。如果出现任何处理不均匀性,则其仅在虚设单元164a、164b、164c、164d中发生,这些虚设单元是非电活跃的并且不参与压力测量。虚设单元164a、164b、164c、164d为活跃单元160a、160b提供了均匀的包围,从而防止了活跃单元160a、160b在制造过程中在沉积、光刻和蚀刻步骤期间的不均匀行为,这被称为邻近效果。设置虚设单元164a、164b、164c、164d是为了有利地改善处理均匀性。就此而言,活跃单元160a、160b总是通过至少一个虚设单元164a、164b、164c、164d与管芯310和/或晶片300的角或边缘间隔开。如在图3中所示的,例如,在分离的压力传感器150上存在虚设单元164a指示了在晶片300和/或管芯310中电容性单元的这种有利的密集布置。
活跃单元160a、160b也被设置在管芯310中的电容性单元的密集布置内的对称环境中。就此而言,在图11中示出了轴314和轴316,其可以被称为对称轴。在此而言,活跃单元160a、160b能够关于轴314和/或轴316对称。轴314是横轴或x轴。轴316是垂直轴或y轴。活跃单元160a、160b也相对于左侧的虚拟单元164a和右侧的虚拟单元164b对称地布置(例如,沿轴314)。就此而言,虚设单元164a与其最近的活跃单元160a间隔开的节距220与虚设单元164b与其最近的活跃单元160b间隔开的节距相同。在各种实施例中,节距320能够是任何合适的值。在一些实施例中,节距320能够在大约30μm与大约70μm之间、在大约40μm与大约60μm之间、和/或在大约50μm与大约55μm之间,包括诸如48μm、50μm、51μm、52μm、53μm、54μm、55μm、57μm的值,和/或更大和更小的其他合适的值。
活跃单元160a、160b也相对于虚拟单元164c在上方和下方(例如,沿着轴316)对称地布置。就此而言,最接近和高于活跃单元160a、160b(邻近图10中的压力传感器150的顶部边缘330和/或在其附近)的虚设单元164c以及最接近和低于活跃单元160a、160b(邻近图10中的压力传感器150的底部边缘332和/或在其附近)的虚设单元160c间隔相同的节距224。在各种实施例中,节距324能够是任何合适的值。在一些实施例中,节距324能够在大约20μm与大约60μm之间、在大约30μm与大约50μm之间、和/或在大约42μm与大约46μm之间,包括诸如40μm、42μm、43μm、44μm、45μm、46μm、48μm的值,和/或更大和更小的其他合适的值。
在其中制造活跃单元160a、160b的对称环境额外地防止了任何处理不均匀性。活跃单元160a和活跃单元160b两者在其各自附近经受相同的制造步骤(例如,相距相同的距离)。结果,活跃单元160a、160b对解剖结构102的管腔104内的流体的外部压力均匀地响应。活跃单元160a、160b也与压力传感器150的顶部边缘330和底部边缘332均匀地间隔开。
众所周知,光刻、沉积和蚀刻过程经受处理不均匀性和邻近效应。因此,活跃单元160a、160b的确切环境很重要。薄膜168也对这些过程变化敏感。虚设单元164a、164b、164c、164d使MEMS过程尽可能均匀,从而两个活跃单元160a、160b在压力传感器150内的行为相同,并且在管芯之间甚至晶片之间也一样。虚设单元164a、164b、164c、164d因此被提供用于均匀性。如在图10和图11中所示的,虚设单元164a、164b、164c、164d的布局是对称的,例如,虚设单元164a、164b、164c、164d的周围沿着轴314、316是对称的。结果,任何活跃单元160a、160b将看到相同的周围,并且光刻、沉积和蚀刻工艺将尽可能地均匀。
活跃单元160a、160b彼此间隔节距322。在各种实施例中,节距322能够是任何合适的值。在一些实施例中,节距322能够在大约10μm与大约40μm之间、在大约15μm与大约35μm之间、和/或在大约22μm与大约26μm之间,包括诸如20μm、22μm、23μm、24μm、25μm、26μm、28μm的值,和/或更大和更小的其他合适的值。节距320(在虚设单元164a、164b与其最近的活跃单元160a、160b之间)大于节距322(在活跃单元之间)。就此而言,管芯310中的电容性单元的空间紧凑分布考虑了针对沿着边界312的DRIE的空间。亦即,较大的节距320允许沿着边界312的DRIE通道的宽度(例如,在活跃单元160b与活跃单元160a的右侧的虚设单元164b之间)。为了保持对称性,在活跃单元160a与活跃单元160a的左侧的虚设单元164a之间也设置有较大的节距320。因此,虚设单元164a、164b、164c、164d能够被定位为靠近于活跃单元160a、160b以产生密集的布置,同时仍然留下用于被定义的压力传感器150的尺寸和形状以及沿着边界312与DIRE分离的压力传感器150的空间。在一些情况下,节距320、322、324能够被称为距离。
在本文中所描述的一个或多个尺度可以在±10μm、±5μm、±3μm、±2μm、±1μm和/或更大和更小的其他合适的值的公差内是精确的。在一些情况下,在本文中所描述的一或多个尺度的公差可以为±3σ。
本领域技术人员还将认识到,上文所描述的装置、系统和方法能够以各种方式修改。因此,本领域普通技术人员将意识到,本公开包含的实施例并不限于上述特定示例性实施例。就此而言,尽管已经示出和描述了示例性实施例,但是在前述公开中可以想到各种各样的修改、改变和替换。应当理解,在不背离本公开的范围的情况下,可以对前述内容进行这样的变化。因此,适当的是,以与本公开一致的方式宽泛地解释所附的权利要求。
- 具有电容性压力传感器的腔内设备
- 电子设备、电容式触摸压力传感器、电容性传感器