车辆中无线毫米波系统的适应性天线阵结构
文献发布时间:2023-06-19 11:03:41
技术领域
本主题公开涉及用于车辆中的无线毫米波(mmWave)系统的适应性天线阵列配置。
背景技术
车辆(例如汽车、卡车、建筑设备、农业设备、自动化工厂设备)可以包括传感器和通信设备,以获得关于车辆及其周围环境的信息。该信息可以促进自主或半自主(例如避免碰撞、自动制动)车辆的操作以及通信,例如车辆和基站之间的数据传输。该通信可以包括例如车辆信息娱乐系统的数据或远程信息处理数据。示例性传感器包括摄像头、光探测和测距(激光雷达)系统以及无线电探测和测距(雷达)系统。无线毫米波系统可以提供车辆之间(V2V通信)以及车辆和基础设施(例如基站)之间(V2I通信)的通信能力。与静止场景不同,从车辆到与其通信的给定实体(即通信电路中的节点)的方位和距离可能改变,因为车辆是移动平台。因此,期望为车辆中的无线毫米波(mmWave)系统提供适应性天线阵列配置。
发明内容
在一个示例性实施例中,一种用于车辆中的无线毫米波(mmWave)系统的方法包括确定从无线毫米波系统到车辆外部的节点的链路的方向(direction)和定位(orientation),以及计算无线毫米波系统的天线元件阵列,以产生辐射样式,从而形成链路。天线元件的阵列是无线毫米波系统所有天线元件的子集。无线毫米波系统的天线元件的所述阵列被配置成通过所述链路与节点通信。
除了本文描述的一个或多个特征之外,确定方向和定位、计算天线元件阵列以及配置天线元件的所述阵列是在车辆移动时连续迭代执行的。
除了本文描述的一个或多个特征之外,配置天线元件的所述阵列包括控制由天线元件阵列中的每个天线元件发射的信号的幅值和相位,以产生所述辐射样式。
除了本文描述的一个或多个特征之外,该方法还包括从天线元件的所述阵列的每个天线元件同时发射,以产生所述辐射样式。
除了本文描述的一个或多个特征之外,该方法还包括确定到第二节点的第二链路的第二方向和定位,以及计算无线毫米波系统的天线元件的第二阵列,以产生第二辐射样式,从而形成第二链路。
除了本文描述的一个或多个特征之外,该方法还包括使用天线元件的所述阵列发射所述辐射样式,同时使用天线元件的第二阵列发射第二辐射样式。
除了本文描述的一个或多个特征之外,该方法还包括计算无线毫米波系统的天线元件的额外阵列,以产生指向该节点的额外辐射样式。产生额外辐射样式包括与额外辐射样式不相关的所述辐射样式。
除了本文描述的一个或多个特征之外,该方法还包括使用开关矩阵来适应性地限定天线元件的阵列。
除了本文描述的一个或多个特征之外,该方法还包括使用天线元件的所述阵列将数据从车辆的一个或多个传感器传输到节点。从车辆的一个或多个传感器传输数据包括从雷达系统、激光雷达系统或摄像头传输数据。
除了本文描述的一个或多个特征之外,该方法还包括在车辆处使用天线元件的所述阵列从节点接收数据。
在另一个示例性实施例中,车辆中的系统包括车辆中的无线毫米波(mmWave)系统,该系统包括用于在毫米波长范围内进行发射和接收的天线元件。该系统还包括控制器,用于确定从无线毫米波系统到车辆外部节点的链路的方向和定位,并计算无线毫米波系统的天线元件的阵列,以产生形成链路的辐射样式。天线元件的所述阵列是无线毫米波系统所有天线元件的子集。控制器还配置无线毫米波系统的天线元件的所述阵列,以通过链路与节点通信。
除了本文描述的一个或多个特征之外,控制器迭代地确定方向和定位,计算天线元件的所述阵列,并且在车辆移动时连续地配置天线元件阵列。
除了本文描述的一个或多个特征之外,控制器通过控制由天线元件的所述阵列中的每个天线元件发射的信号的幅值和相位来配置天线元件阵列,以产生所述辐射样式。
除了本文描述的一个或多个特征之外,天线元件的所述阵列中的每个天线元件同时发射,以产生所述辐射样式。
除了本文描述的一个或多个特征之外,控制器确定到第二节点的第二链路的第二方向和定位,并且计算无线毫米波系统的天线元件的第二阵列,以产生第二辐射样式,从而形成第二链路。
除了本文描述的一个或多个特征之外,所述辐射样式由天线元件的所述阵列发射,同时第二辐射样式由天线元件的第二阵列发射。
除了本文描述的一个或多个特征之外,控制器计算无线毫米波系统的天线元件的额外阵列,以产生指向节点的额外辐射样式,并且控制所述辐射样式与额外辐射样式不相关。
除了本文描述的一个或多个特征之外,该系统还包括被配置为适应性地定义天线元件的所述阵列的开关矩阵。
除了本文描述的一个或多个特征之外,无线毫米波系统使用天线元件的所述阵列将数据从车辆的一个或多个传感器传输到节点,该一个或多个传感器包括雷达系统、激光雷达系统或摄像头。
除了本文描述的一个或多个特征之外,无线毫米波系统使用天线元件的所述阵列从节点接收数据。
当结合附图时,根据以下详细描述,本公开的上述特征和优点以及其他特征和优点将变得显而易见。
附图说明
其他特征、优点和细节仅作为示例出现在以下详细描述中,详细描述参考附图,其中:
图1是根据一个或多个实施例的具有无线毫米波系统的示例性车辆的框图,该无线毫米波系统包括适应性天线阵列配置;
图2A、2B和2C示出了根据一个或多个实施例的布置在三维形状上以便于进行适应性天线阵列配置的天线元件的示例性实施例;
图3示出了根据一个或多个实施例的用于车辆无线毫米波系统的示例性适应性天线阵列配置;
图4是根据一个或多个实施例的用于执行适应性天线阵列配置的无线毫米波系统的相关方面的框图;
图5是根据一个或多个实施例的可以适应性地耦合到天线元件以配置天线阵列的示例性RF链的框图;
图6是图5所示光束控制单元的详细框图;和
图7是根据一个或多个实施例的在车辆无线毫米波系统中适应性配置天线阵列的方法流程图。
具体实施方式
以下描述本质上仅仅是示例性的,并不旨在限制本公开、其应用或使用。应当理解,在所有附图中,相应的附图标记表示相似或相应的部件和特征。
如前所述,无线毫米波(mmWave)系统是车辆可以使用的示例性通信系统之一。毫米波系统有助于高速数据传输。由于车辆应用涉及移动平台的事实,无线毫米波系统和与无线毫米波系统通信的节点(通常是基站或另一车辆)之间的定位(orientation)可能实时改变。例如,在传输大型数据文件的过程中,车辆的无线毫米波系统和节点之间的定位可能会发生变化。
本文详述的系统和方法的实施例涉及为车辆无线毫米波系统提供适应性天线阵列配置。作为有源辐射器以三维或平面形状分布的天线元件被适应性地选择用于操作。选定的天线元件形成一个或多个天线阵列。在不同的时间,不同的天线元件可以组合在一起,以形成一个或多个阵列。可以通过对提供给阵列的每个天线元件的信号应用不同的幅值和相位值来执行波束成形(beamforming)。用于操作的天线元件的选择(即,发射和接收)可以基于方向性、主瓣波束宽度或增益来优化射频(RF)链路质量。这里讨论的例子不是为了限制适应性地形成天线阵列的基础。
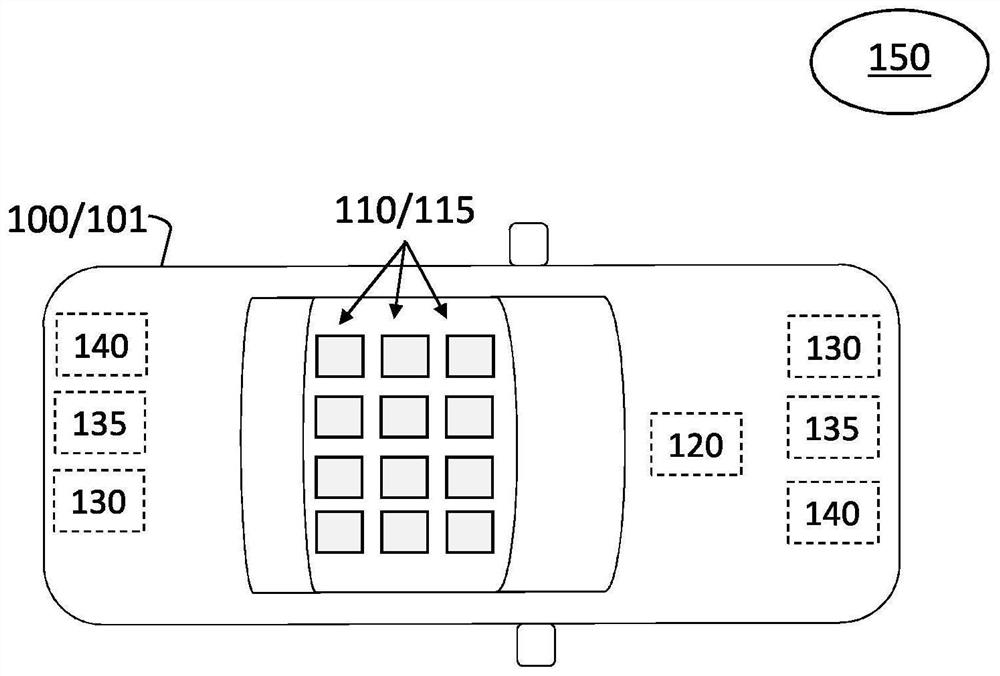
根据示例性实施例。图1是具有无线毫米波系统的示例性车辆100的框图,该无线毫米波系统包括适应性天线阵列配置。图1中的示例性车辆100是汽车1010。车辆100被示出为具有无线毫米波系统110,该系统包括一组天线元件115。无线毫米波系统110的其他方面将参考图4-7进行讨论。通常,无线毫米波系统能发射和接收频率在30千兆赫(GHz)和300GHz之间的信号。车辆100的无线毫米波系统110可以发射和接收28GHz或39GHz频带的信号。在图1所示的示例性情况下,天线元件115布置在车辆100的平车顶上。
示例性车辆100被示出具有其他传感器,例如摄像头130、雷达系统135和激光雷达系统140。传感器的数量和位置不受该示例的限制。根据一个或多个实施例,来自这些其他传感器中的一个或多个的信息可以经由节点150(例如,基站、另一辆车)传输到车辆100以外。尽管图1中示出了一个示例性节点150,但是在车辆100的视线中,在给定的位置且随其移动,会有多个节点150。如前所述,车辆100和基站之间的RF链路的维护需要适应性地从天线元件115配置出一个或多个天线阵列310(图3)。还在示例性车辆100中示出了控制器120。控制器120可以由两个或更多个控制器120组成,控制器120相互通信以执行所描述的功能。控制器120可以从其他传感器或其他来源获得信息,以指导不同天线阵列310的适应性配置。
控制器120可以用于向无线毫米波系统110传输信息和从无线毫米波系统110传输信息。由无线毫米波系统110和其他传感器以及信息源获得的信息可以用于控制车辆100的一些方面的操作。例如,半自主系统(例如适应性巡航控制、碰撞避免、自动制动)或自主操作可以由通过经由控制器120传输的信息来控制。控制器120包括处理电路,该处理电路可以包括专用集成电路(ASIC)、电子电路、处理器(共享的、专用的或成组的)和执行一个或多个软件或固件程序的存储器、组合逻辑电路和/或提供所述功能的其他合适的部件。
图2A、2B和2C示出了设置在三维形状200上的天线元件115的示例性实施例。图2A在圆柱形的三维形状200上示出了天线元件115。还示出了示例性天线波束210。示例性天线波束210处于相同的高度,但是相邻的天线波束210相隔90度。图2B在三维形状200上示出了天线元件115,该三维形状类似于没有两极的球体。由于这种形状,许多天线元件115的波束样式立体角(beam pattern solid angle)包括方位角(azimuth)和仰角偏移。结果,例如,相对于使用图2A中的三维形状200的天线元件115中的一个或一个阵列在相同方向上操纵波束,示例性波束210的波束特性可以得到改善。图2B所示的示例性三维形状200例如在无线毫米波系统110需要同时与多个节点150通信时是有利。图2C示出了其上设置有天线元件115的示例性三维形状200,其类似于截锥形(即,截头圆锥形)。
图3示出了根据一个或多个实施例的用于车辆无线毫米波系统110的示例性适应性天线阵列配置。在图3所示的三维形状200上设置有M个天线元件115。三个不同的天线阵列310a、310b、310c(通常称为310)由M个天线元件115适应性地配置。天线阵列310a包括六个天线元件115,如用点表示的矩阵320所示。也就是说,矩阵320包括与形成有源天线阵列310的每个天线元件115相对应的点。天线阵列310b包括三个天线元件115,天线阵列310c包括六个天线元件115。其他示例性天线阵列310可以重新使用作为示例性天线阵列310a、310b、310c中任何一个的一部分的天线元件115。
图4是根据一个或多个实施例的用于执行适应性天线阵列配置的无线毫米波系统110的相关方面的框图。无线毫米波系统110包括无线毫米波控制器410、N个RF链420-A至420-N(通常称为420)、开关矩阵430和M个天线元件115-A至115-M(通常为115)。通常,可以有与天线元件115相比一样多或更少的RF链420(即,N可以小于或等于M)。无线毫米波控制器410确定哪个RF链420是可操作的,以及哪个或哪些天线元件115将被运行中的RF链420激励。将参照图7进一步讨论无线毫米波控制器410做出的这种确定。该确定的实现是通过开关矩阵430做出的。因此,图3所示的矩阵320可以被视为开关矩阵430的一个示例性设置的结果。示例性开关矩阵430包括从每个RF链420到每个天线元件115的可控开关器435。在配置任何天线阵列310之前,所有开关器435都被示为处于关闭(断开)位置。尽管图4中示出了包括开关器435的示例性开关矩阵430,但是根据替代实施例,可以使用其他机制来将一个或多个RF链420连接到天线元件115。
根据示例性实施例,开关矩阵430可以在每个RF链420处包括分路器,以将来自RF链420的输出和到RF链420的输入分成M路。这些M个输入和输出对中的每一个可以被提供给M个天线元件115中的每一个处的开关器。无线毫米波控制器410可以包括时钟和现场可编程门阵列(FPGA),并且像车辆100的控制器120一样,可以包括其他处理电路,该处理电路可以包括专用集成电路(ASIC)、电子电路、处理器(共享的、专用的或成组的)和执行一个或多个软件或固件程序的存储器、组合逻辑电路和/或提供所述功能的其他合适的部件。
在一种极端情况下,单个RF链420可以通过开关矩阵430产生发射信号440并将其提供给M个天线元件115中的每一个。然后,在M个天线元件115的每一个处接收的信号450通过开关矩阵430提供给单个RF链420。在另一个极端情况下,每个RF链420可以通过开关矩阵430产生发射信号440并将其提供给相应的天线元件115。通常,N个RF链420的一些子集K可以通过开关矩阵430适应性地耦合到M个天线元件115的相应子集K,以形成与图3所示的示例性天线阵列310类似的天线阵列310。参考图5和6详细描述RF链420的示例性实施方式。
图5是根据一个或多个实施例的示例性RF链420的框图,该RF链420可以适应性地耦合到天线元件115,以配置天线阵列310。每个示例性RF链420包括发射部件501和接收部件502。发射部件501包括数字上变频单元(digital up conversion unit)505、波峰因数降低单元(crest factor reduction unit)510和数字预失真单元(digital pre-distortionunit)515。数字预失真单元515的输出被提供给数模转换器(DAC)520,并且所得到的模拟信号被提供给上变频器525。来自DAC 520的模拟信号处于中频(例如,20兆赫(MHz))。上变频器525包括可变增益放大器(VGA)530、低通滤波器535和由振荡器545提供的混频器540。上变频器的输出被提供给带通滤波器550和功率放大器(PA)555。双工器560将来自发射部件501的信号发送到波束操纵单元600,以进行发射(例如,到车辆100视线内的节点150)。在替代的RF链420实施例中,可以使用双工器或发射和接收开关来代替。接收信号(例如,来自车辆100在其视线内的节点150)由接收部件502处理。去往和来自波束控制单元600的信号是RF信号610。波束控制单元600用于移动RF信号610的振幅和相位,以执行波束成形,并将参考图6进一步讨论。
接收部件502包括低噪声放大器(LNA)565,其后是带通滤波器550。带通滤波器550的输出被提供给下变频器(down-converter)570。下变频器570包括也由振荡器545提供的混频器540、低通滤波器535和VGA 530。下变频器570的输出被提供给模数转换器(ADC)575。所得数字信号被提供给数字下变频单元580。无线毫米波系统110的其他已知元件和方面不再详述。
图6是详细说明图5所示波束控制单元600的各个方面的框图。继续参考前面的附图。波束控制单元600可以用作RF链420的一部分,以利用适应性配置的天线阵列310执行波束成形。来自RF链420的发射部件501的RF信号610被提供给移相器620。产生的相移RF信号被发射到开关630,开关630分离波束操纵单元600的发射侧501和接收侧502。例如,开关630可以是单刀双掷开关。在发射侧501,PA 640放大相移RF信号,并将其提供给另一个开关650,以输出到开关矩阵430。当接收信号450通过开关矩阵430到达开关650时,使用RF链420的接收侧502。限制器660后面是LNA 670。LNA 670的输出被提供给开关630,开关630将其导向移相器620。移相器将所得到的射频信号610提供给双工器560。
图7是根据一个或多个实施例的在车辆无线毫米波系统110中适应性配置天线阵列310的方法700的过程流程。继续参考前面的图中所示的过程。图7所示的处理过程可以由控制器120、无线毫米波系统控制器410或两者的组合来执行。在框710,可以在车辆100中的无线毫米波系统110的操作期间的任何时间确定期望链路的方向和定位。例如,所有天线元件115可以单独用于扫描(例如,从无线毫米波系统10的视线内的节点150接收广播)。然后,不同天线元件115的接收信号450的相对强度可用于定位一个或多个感兴趣的节点150。相对于每个节点150的方向和定位定义了每个期望的链路。
在框720,计算天线元件115的组合以生成一个或多个辐射样式(radiationpattern)指的是,确定一个或多个天线阵列310形成期望的一个或多个链路所需的天线元件115。在框730,该过程包括配置一个或多个天线阵列310的天线元件115,并为每个天线元件115分配幅值和相位,以实现一个或多个链路所需的一个或多个辐射样式。当车辆100正在移动时,可以连续执行框710、720和730处的过程,因为一个或多个期望的链接的方向和定位可以改变。结果,可能需要重新配置天线阵列310来维持链路。当一个节点150脱离无线毫米波系统110的视线,而另一个节点150进入视线时,期望的链路和相应的天线元件115可以相应地改变。给每个天线阵列310中的每个天线元件115分配特定的幅值和相位是生成期望的辐射样式的过程的一部分。
当两个或更多天线阵列310被配置(在框730)为与同一节点150通信时(例如为了增加数据传输的吞吐量),来自不同天线阵列310的指向相同节点150的辐射样式被生成为不相关的。这意味着,例如,由每个天线阵列310发射的辐射样式以确保辐射样式不重叠的方式指向节点150的不同天线。不重叠意味着由天线阵列310发射的辐射样式之间没有干扰。作为另一个例子,正交极化(orthogonal polarization)被用于每个天线阵列310,以消除天线阵列310发射的辐射样式之间的干扰。在给定的天线阵列310内,天线元件115同时发射和接收。在被配置(在框730)用于两个或更多链路的两个或更多天线阵列310中,天线阵列310可以同时地或依次地发射辐射样式。
虽然已经参考示例性实施例描述了上述公开,但是本领域技术人员将理解,在不脱离本发明的范围的情况下,可以进行各种改变,并且等同物可以替代其元件。此外,在不脱离本公开的基本范围的情况下,可以进行许多修改以使特定情况或材料适应本公开的教导。因此,意图是本公开不限于所公开的特定实施例,而是将包括落入其范围内的所有实施例。
- 车辆中无线毫米波系统的适应性天线阵结构
- 基于毫米波雷达的网络监控系统及毫米波天线阵列结构