螺旋线从预装位置到装配位置的调整方法
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及真空电子产品的调整方法,尤其涉及螺旋线从预装位置到装配位置的调整方法。
背景技术
行波管是在国防和国民经济中广泛应用的电子器件,其具有良好的功率、频带和增益性能。行波管内的高频结构是其中的核心器件,起到降低电磁波的相速度的作用,使电子和电磁波发生有效的相互作用。
目前的高频结构一般包括管壳、夹持杆及螺旋线。在螺旋线装配到夹持杆和管壳之前,需要对螺旋线进行调整,使螺旋线端部满足装配条件,满足装配条件之后,才能对螺旋线进行装配。目前调整螺旋线端部位置方法,是通过取线针从螺旋线中穿过,然后电机带动取线针绕自身轴线旋转,从而带动螺旋线转动,这种调整方法在螺旋线和取线针之间很容易发生相对滑动,使得螺旋线不跟随取线针的转动而转动,产生失效操作,操作可靠性低。
发明内容
本发明提供了一种螺旋线从预装位置到装配位置的调整方法,将螺旋线调整分为两部分,若螺旋线未到达调整位置,则将螺旋线调整至调整位置,通过沿螺旋线侧面的切线方向提供摩擦力使得螺旋线转动,使螺旋线到达调整位置,到达调整位置后,若螺旋线未达到装配位置,则再使螺旋线到达装配位置。在使螺旋线到达调整位置过程中,通过施加一个沿螺旋线切线方向的摩擦力,使螺旋线不会发生相对滑动,避免失效操作,提高操作的可靠性。
本发明为解决上述技术问题所采用的技术方案是:
提供一种螺旋线从预装位置到装配位置的调整方法,包括:通过视觉传感器对处于预装位置的螺旋线成像;确定成像图像中螺旋线的中心线位置;确定成像图像中螺旋线的线头第一位置;若视觉传感器监测到线头位于靠近视觉传感器一侧并且成像图像中线头第一位置到达中心线位置,则判断螺旋线达到调整位置;否则,沿螺旋线侧面的切线方向提供摩擦力使得螺旋线转动,直至监测到螺旋线达到调整位置;确定成像图像处于调整位置的线头第二位置与一预设基准线的距离,基准线垂直于中心线;若视觉传感器监测到线头第二位置距离基准线的距离符合一预设距离,则判断螺旋线达到装配位置;否则,沿中心线延伸方向改变螺旋线在成像图像中的位置,直至监测到螺旋线达到装配位置。
本申请将螺旋线的调整方法分为两部分,一部分为螺旋线的线头第一位置与螺旋线的中心线位置的调整,使螺旋线符合调整位置,另一部分为螺旋线的线头第二位置与一预设基准线的距离的调整,使螺旋线符合装配位置,在螺旋线符合调整位置之后再使螺旋线符合装配位置,在螺旋线不符合调整位置时,通过沿螺旋线侧面的切线方向提供摩擦力使得螺旋线转动,使得螺旋线符合调整位置,通过侧面的切线方向给螺旋线摩擦力使螺旋线转动,可以避免螺旋线和提供摩擦力的部件产生相对滑动,减少失效操作,更有效的将螺旋线调整至调整位置,提高操作的可靠性。
进一步的,在成像图像中取螺旋线的两段;在所取一段和另一段中各分别选取螺旋线的旋出成像图像处的多个旋出顶点,通过多个旋出顶点分别在所取一段和另一段中各拟合一条直线,以该两条直线确定为螺旋线的两条旋出线;在所取一段和另一段中各分别选取螺旋线的旋入成像图像处的多个旋入顶点,通过多个旋入顶点分别在所取一段和另一段中各拟合一条直线,以该两条直线确定为螺旋线的两条旋入线;在所取一段中的旋出线和旋入线各取一点,并确定所取两点间的中点为第一中点;在所取另一段中的旋出线和旋入线各取一点,并确定所取两点间的中点为第二中点;确定过第一中点和第二中点的直线为中心线。取螺旋线的两段,并分别在两段中选取多个旋出/旋入顶点,拟合出一条旋出线/旋入线,通过选取多点,拟合出直线的方式可以使得所拟合出的直线更精确,然后在一段中选取旋入线和旋出线上各一点,并取两点间的中点,在另一段中同样选取旋入线和旋出线上各一点,并取两点间的中点,并通过所选取的两个中点确定螺旋线的中心线;相较之选取一段图像,做中心线更加准确。
进一步的,在垂直于中心线方向取螺旋线的线头一点,以该线头一点位置确定为线头第一位置。在垂直于中心线方向取线头一点,在转动螺旋线时,线头一点在成像图像中沿垂直于中心线方形运动,方便判断螺旋线的线头第一位置是否和中心线重合,即方便判断螺旋线是否到达调整位置。
进一步的,确定所述成像图像中垂直于所述中心线的直线为所述基准线。基准线垂直于中心线,在调整螺旋线的线头第二位置到装配位置只需沿中心线延伸方向移动螺旋线,易于调整操作。
进一步的,在平行于中心线方向取螺旋线的线头一点,以该线头一点位置确定为线头第二位置。在平行于中心线方向取线头一点,在改变螺旋线在成像中的位置时,线头一点在成像图像中沿平行于中心线方形运动,方便判断螺旋线线头第二位置与基准线的距离,即方便判断螺旋线是否到达装配位置。
进一步的,若线头第二位置未达到装配位置,则沿中心线延伸方向移动螺旋线,从而改变螺旋线在成像图像中的位置。
进一步的,若线头第二位置未达到装配位置,则沿中心线延伸方向移动视觉传感器,从而改变螺旋线在成像图像中的位置。
在螺旋线未达到装配位置时,沿中心线方向改变螺旋线在成像图像中的位置,可以沿中心线延伸方向移动视觉传感器,也可以沿中心线延伸方向移动螺旋线,调整螺旋线使其到达装配位置的方式更加灵活。
附图说明
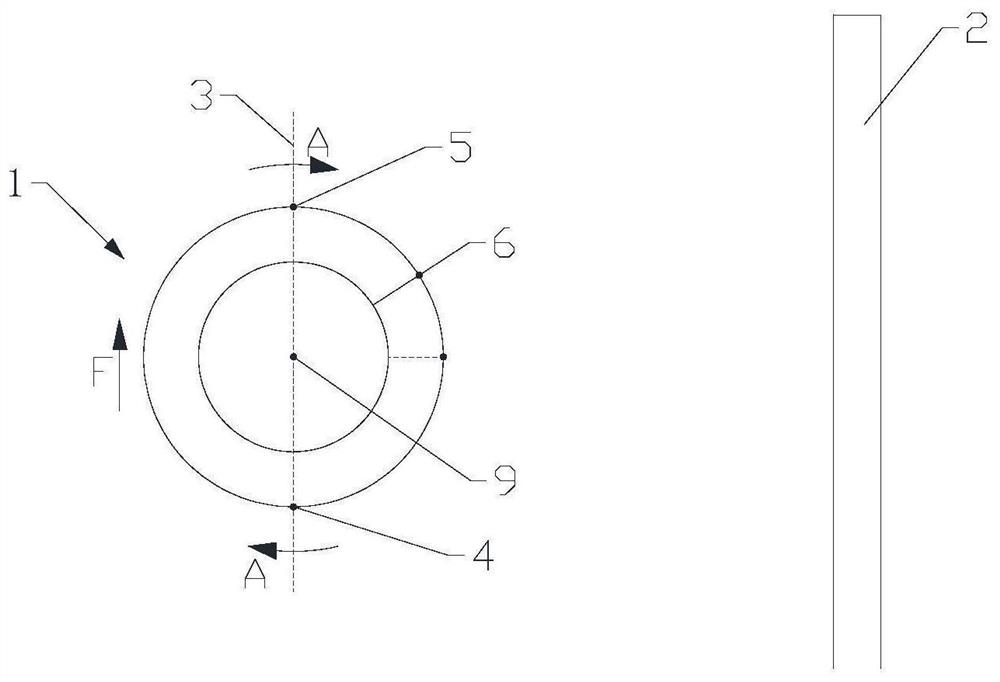
图1为本发明螺旋线与视觉传感器位置侧视图。
图2为本发明螺旋线中心线示意图。
图3为本发明螺旋线处于预装位置情形之一。
图4为本发明螺旋线达到调整位置的示意图。
图5为本发明螺旋线调整位置示意图。
图6为本发明螺旋线达到装配位置的示意图。
图7为本发明一种实施例示意图。
图中,1、螺旋线;2、视觉传感器;3、成像平面;4、旋入顶点;5、旋出顶点;6、线头第一位置;7、旋入线;8、旋出线;9、中心线;10、线头第二位置;11、基准线。
具体实施方式
为能清楚说明本方案的技术特点,下面通过具体实施方式,并结合其附图,对本发明进行详细阐述。
在下面的描述中阐述了很多具体细节以便于充分理解本申请,但是,本申请还可以采用其他不同于在此描述的其他方式来实施,因此,本申请的保护范围并不受下面公开的具体实施例的限制。
另外,在本申请的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。在本申请的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
如图1、图2所示,螺旋线1的螺旋方向为箭头A所示的方向,螺旋线1一侧有一视觉传感器2,视觉传感器2能够监测螺旋线1侧面在成像平面3上的成像。螺旋线1沿箭头A方向螺旋,并穿过成像平面3,向靠近视觉传感器2所在一侧穿过为旋出,向远离视觉传感器2所在一侧穿过为旋入。螺旋线1旋入处与成像平面3相交的外侧顶点为旋入顶点4,螺旋线1旋出处与成像平面3相交的外侧顶点为旋出顶点5。另外,螺旋线1的螺旋方向也可以为箭头A的相反方向。
如图7所示,S11,将螺旋线1送入到如图3所示的预装位置,当螺旋线1到达预装位置后,视觉传感器2对处于预装位置的螺旋线1进行成像。
S12,视觉传感器2对处于预装位置的螺旋线1成像后,确定成像图像中螺旋线1的中心线9位置,如图2所示,在螺旋线1成像图像中沿螺旋线1长度方向选取图像中的X和Y两段,在所选取的X段和Y段中,分别取多个旋出顶点5,然后分别拟合一条旋出线8,再分别取多个旋入顶点4,然后分别作出一条旋入线7,然后在所取X段中的旋出线8取点M1,在旋入线7上取点N1,通过所取的M1和N1两点,确定该两点间的中点C1为第一中点,在所取Y段中的旋出线8取点M2,在旋入线7上取点N2,通过所取的M2和N2两点,确定该两点间的中点C2为第二中点,然后过第一中点C1和第二中点C2做一条直线,该直线为螺旋线1的中心线9。另外,确定中位线的方式不限于前述,还可以如,在螺旋线1成像图像中沿螺旋线1长度方向选取图像中的X和Y两段;在所选取X段中取成像图像中的多个旋出顶点5,通过多个旋出顶点5拟合出一条旋出线8,在该X段中取成像图像中的多个旋入顶点4,通过多个旋入顶点4拟合出一条旋入线7,在该X段中的旋出线8上取点M1,旋入线7上取点N1,通过M1和N1两点,确定该两点间的中点C1为第一中点;在所选取Y段中取成像图像中的多个旋出顶点5,通过多个旋出顶点5拟合出一条旋出线8,在该Y段中取成像图像中的多个旋入顶点4,通过多个旋入顶点4拟合出一条旋入线7,在该Y段中的旋出线8上取点M2,旋入线7上取点N2,通过M2和N2两点,确定该两点间的中点C2为第一中点;然后过第一中点C1和第二中点C2做一条直线,该直线为螺旋线1的中心线9。在成像图像中取两段,在每一段中取多个旋出顶点5/旋入顶点4拟合旋出线8/旋入线7,可以使旋出线8/旋入线7更加准确,更加贴合螺旋线1的平行于中心线9的边缘,取得的旋出/旋入顶点4越多,所确定的中心线9越准确。
S13,在视觉传感器2确定螺旋线1的中心线9位置后,视觉传感器2在螺旋线1的线头上选取一点作为螺旋线1的线头第一位置6,视觉传感器2在螺旋线1的线头上选取的一点可以为线头的端面上一点,优选为线头在成像图像中的平行于中心线9方向的中点或者顶点,选取线头在成像图像中的平行于中心线9方向的中点或者顶点,便于点的选取和位置的确定,如图2、图3、图4中线头在成像图像中的平行于中心线9方向的中点。线头第一位置6的点的选取,可以在垂直于中心线9方向上选取,也可以在平行于中心线9方向上选取,优选为在垂直于中心线9方向上选取。
S14,在确定螺旋线1的中心线9位置和螺旋线1的线头第一位置6后,视觉传感器2进行螺旋线1是否到达如图4所示的调整位置的判断,若视觉传感器2监测到线头位于靠近视觉传感器2的一侧并且在成像图像中线头第一位置6到达螺旋线1的中心线9位置,线头第一位置6和螺旋线1中心线9重叠,如图1中线头第一位置6沿箭头A方向旋转至虚线的位置,则视觉传感器2判断螺旋线1已经到达如图4所示的调整位置;若视觉传感器2没有监测到线头位于靠近视觉传感器2的一侧并且在成像图像中线头第一位置6到达螺旋线1的中心线9位置,则视觉传感器2判断螺旋线1未到达如图4所示的调整位置,此时则沿螺旋线1侧面的切线方向给螺旋线1施加如图1中所示的摩擦力F,使得螺旋线1在摩擦力F的作用下转动,使得螺旋线1的线头第一位置6在成像图像中沿垂直于中心线9方向运动,直至视觉传感器2判断螺旋线1已经到达如图4所示的调整位置。沿螺旋线1侧面的切线方向提供摩擦力F所述螺旋线1转动,可以通过一柔性材料覆盖的平板进行,也可以通过其他可以提供摩擦力的方式进行。另外,摩擦力F施加于螺旋线1的位置可以是便于视觉传感器2成像的、在螺旋线1侧面的任何合适的位置。
S15,如图5所示,在视觉传感器2判断螺旋线1已经到达调整位置后,则在成像图像中处于调整位置的螺旋线1线头确定线头第二位置10和线头第二位置10与一垂直于中心线9的预设基线的距离d;在确定线头第二位置10时,可以在垂直于中心线9方向上选取,也可以在平行于中心线9方向上选取,优选为在平行于中心线9方向上选取。S13和S15中线头第一位置6的点和线头第二位置10的点可以为同一点,也可以为不同点,二者在选取方式上有所不同,图5中线头第二位置10的点为螺旋线沿箭头B方向上的顶点。中心线9的延伸方向为箭头B所示的方向,也可以为箭头B所示方向的相反方向。
S16,确定螺旋线1线头第二位置10和螺旋线1线头第二位置10与一预设基准线11的距离d后,若视觉传感器2监测到线头第二位置10和基准线11的距离符合预设距离d,则视觉传感器2判断螺旋线1到达如图6所示的装配位置,监测结束;若视觉传感器2未监测到线头第二位置10和基准线11的距离符合预设距离d,即螺旋线1未到达如图6所示的装配位置,则沿箭头B方向,即中心线9的延伸方向,改变螺旋线1在成像图像中的位置,直至视觉传感器2监测到螺旋线1到达如图6所示的装配位置。在螺旋线1线头第二位置10未达到装配位置时,可以沿中心线9延伸方向移动螺旋线1,也可以沿中心线9延伸方向移动视觉传感器2,从而改变螺旋线1在成像图像中的位置。
本发明的另一种实施例,其与图7所示的实施例的区别在于,图7中先确定中心线9,再确定线头第一位置6,另一种实施例为先确定线头第一位置6,再确定中心线9。
本申请将螺旋线1的调整分为两部分,一部分为螺旋线1的线头第一位置6与螺旋线1的中心线9位置的调整,另一部分为螺旋线1的线头第二位置10与一预设基准线11的距离的调整,在螺旋线1符合调整位置之后再使螺旋线1符合装配位置,在螺旋线1不符合调整位置时,通过沿螺旋线1侧面的切线方向提供摩擦力使得螺旋线1转动,使得螺旋线1符合调整位置,通过侧面的切线方向给螺旋线1摩擦力使螺旋线1转动,提供一个稳定的摩擦力,可以避免螺旋线1和提供摩擦力的设备产生相对滑动,减少失效操作,提高操作的可靠性。在确定螺旋线1的中心线9位置时,在成像图像中选取螺旋线1的两段,在一段和另一段中分别取多个旋出顶点5和多个旋入顶点4,并在两段中分别拟合出旋出线8和旋入线7,然后在两段中各取旋出线8上一点与旋入线7上一点确定两点的中点,然后过成像图像中两段的中点的直线为螺旋线1的中心线9,通过两段确定中心线9,选取的旋入顶点4/旋出顶点5多,从而确定中心线9精度更加准确。在调整螺旋线1线头第一位置6与中心线9位置时,在成像图像中,螺旋线1线头一点沿垂直于中心线9方向运动,在垂直于中心线9方向上选取螺旋线1线头一点为线头第一位置6,可以更加便捷直观的判断线头第一位置6是否到达调整位置。在调整螺旋线1线头第二位置10与一预设基准线11的距离时,在成像图像中,螺旋线1线头一点沿平行于中心线9方向运动,在平行于中心线9方向上选取螺旋线1线头一点为线头第二位置10,可以更加便于观察判断线头第二位置10与一预设基准线11的距离是否符合预设距离,即便于判断螺旋线1是否到达装配位置。
上述具体实施方式不能作为对本发明保护范围的限制,对于本技术领域的技术人员来说,对本发明实施方式所做出的任何替代改进或变换均落在本发明的保护范围内。
本发明未详述之处,均为本技术领域技术领域技术人员的公知技术。
- 螺旋线从预装位置到装配位置的调整方法
- 光检测器装配位置调整方法及设备