一种连续的GNSS载波相位时间和频率传递方法
文献发布时间:2023-06-19 11:08:20
技术领域
本发明属于高精度时间同步技术领域,具体涉及一种时间传递方法。
背景技术
时间是物理学的基本参量之一。高精度的时间和频率已成为现代高新技术发展的必要条件,高精度时间和频率在国民经济、国防建设、基础研究等领域发挥着重要的作用,如电力电网、移动通信、轨道交通、大力测量、深空探测、火箭发射、武器试验等都需要高精度的时间作为基础保障。尤其是精准统一的时间,是实现卫星导航、定位的基础,而卫星导航系统的出现又推动了远程高精度时间传递技术的发展。远程时间传递是实现高精度时间和频率服务的重要手段。
目前,远程高精度时间传递技术主要有卫星双向时间频率传递(TWSTFT)、基于全球卫星导航系统(GNSS)的时间和频率传递、光纤时间频率传递法和激光时间频率传递法等,这些方法各有优劣,适用于对时间传递精密度要求不同的场合。基于GNSS的时间频率传递相比其它方法具有设备简单、成本低等优点,已成为国际权度局(BIPM)推荐的国际时间比对方法之一。而现有基于GNSS的远程高精度时间和频率传递技术主要有卫星共视法(GNSS CV)、卫星全视法(GNSS AV)和精密单点定位时间传递法(GNSS PPP)。GNSS CV和GNSSAV以码伪距为观测量,相比于采用载波相位测量的GNSS PPP时间传递法精密度较低。但是,传统的GNSS PPP载波相位时间传递法以“1天”为数据批处理单元,测站钟差在“天”与“天”边界历元处出现“时间跳变”,即日界不连续误差。日界不连续误差的量值在某些测站甚至大于1ns,成为GNSS PPP时间传递的主要误差源,导致两地时钟比对结果出现不连续现象,频率传递出现漂移,影响了两地时钟的长期频率稳定性。日界不连续误差的影响因素很多,传统的认为是受码伪距观测噪声(包括多径误差、测站温度变化等)的影响,导致相位模糊度估计出现偏差;另外还由于GNSS PPP依赖IGS提供的GNSS精密轨道和钟差产品,而由于不同IGS分析中心精密产品产生策略不同,导致不同分析中心精密产品本身就存在不连续误差,这些不连续误差被PPP在测站钟差解算过程中继承,所以使传统PPP时间传递日界不连续误差增大。
为消除传统GNSS PPP时间传递日边界不连续误差,多年来国内外相继出现了多种方法,例如更长时长批处理单元法、载波相位单独解算钟差法、滑动重叠法和模糊度固定法,这些方法虽都一定程度减小边界不连续误差,但是也存在很多缺点。例如更长时长批处理单元法,这种方法虽然采用多天代替1天作为一次PPP解算的批处理单元,可一定程度减小批处理单元内“天”与“天”间的不连续误差,但相邻批处理单元间的不连续误差仍存在且量值基本是日边界不连续误差的累积。载波相位单独解算钟差法,虽然可避免码伪距对载波相位的影响,但是这种方法像传统方法一样依然高度依赖外部GNSS精密产品,而且同时受测站坐标的影响,所以日界不连续误差仍然存在。滑动重叠法虽可减小日界不连续误差,却引入新的噪声,使传统PPP时间传递准确度降低。固定模糊度法消除边界不连续误差效果虽很显著,但是高度依赖外部GNSS精密产品和卫星宽巷相位偏差产品,目前只适用于GPS系统,而不适用于新的GNSS系统,如BDS、Galileo系统,更无法适用于多系统组合PPP时间传递。
发明内容
为了克服现有技术的不足,本发明提供一种连续的GNSS载波相位时间和频率传递方法,采用移位重叠的最小二乘批处理非差网解,采用更长时长的批处理单元,测站接收机钟差解算方法与传统PPP相似,但不依赖外部GNSS精密产品,能够消除日(边)界不连续误差,获得连续的GNSS载波相位时间传递,时间传递更准确、稳健,优势明显,适用于两地时钟的长期频率稳定性比较。
本发明解决其技术问题所采用的技术方案包括以下步骤:
步骤1,选取若干个测站组成一个网络,测站外接原子钟或UTC时间尺度,获取各测站接收机的双频码伪距和载波相位观测数据;
步骤2,在测站中选取一个作为固定参考站;
步骤3,解算固定参考站接收机的钟差、对流层时延、相位模糊度以及站星间几何距离;
步骤4,以固定参考测站钟差估计结果为基准,建立其它测站相对参考测站的双频无电离层码伪距和载波相位组合观测模型;
步骤5,以N天作为一个批处理单元,解算批处理单元中每个历元的测站接收机钟差,N为大于1的自然数;
步骤6,将既定的批处理单元向后顺序移位,重复步骤5继续下一个解算批处理单元所有历元的测站接收机钟差,依次循环,直到解算完成所有数据时长的测站接收机钟差;
步骤7,提取每个批处理单元前N-1天的接收机钟差估计值,用来重构所有数据时长的测站接收机钟差序列;
步骤8,对重构钟差序列的相邻两个批处理单元边界历元处的测站接收机钟差进行平滑,消除移位重叠残余的边界不连续误差;
步骤9,对固定参考站两测站接收机钟差在数据时长内对应历元处作差,获得两测站时钟的差异,即时间传递或比对结果;
步骤10,通过时间比对结果计算两地时钟的频率稳定度及相对频率偏差。
所述的步骤1选取全球均匀分布的多个测站,所选测站数量不低于10个。
所述的步骤2在多个测站中选取一个外接氢原子钟或时间尺度的测站作为固定参考站。
所述的步骤3采用PPP法解算固定参考站接收机的钟差、对流层时延、相位模糊度以及站星间几何距离。
所述的步骤4建立其它测站相对参考测站的双频无电离层码伪距和载波相位组合观测模型,组合码伪距的残差
所述的步骤6将既定的批处理单元向后顺序移位,并与上一个批处理单元重叠1天,依次循环,最后一个批处理单元无论是否满足N天,都以此为一个批处理单元。
所述的步骤8采用加权平均对重构的测站钟差在重叠日边界历元处进行平滑对接。
所述的步骤10通过时间比对结果计算两地时钟比对的修正阿伦方差
本发明的有益效果是:
1.与已有消除PPP时间传递不同日(边)界不连续误差不同,本发明无需高度依赖外部IGS或MGEX精密钟差产品,所有测站接收机钟差和卫星钟差都可独立解算,可避免由于外部GNSS精密钟差产品不连续误差对时间传递边界不连续误差的影响;
2.本发明以外接高稳定时钟的测站为参考时钟,参考时钟是稳定连续的,避免了传统PPP时间传递中参考时间尺度的不连续性,而且单个测站接收机钟差解算可从所有测站接收机钟差解算中受益,所以测站钟差解算更精确、更连续,频率传递稳定性和鲁棒性更好;
3.相对于传统PPP时间和频率传递,本发明以多天代替1天为批处理单元,批处理单元内每日间的不连续误差减小;
表1本发明、传统PPP及TAIPPP的日界不连续误差统计结果
4.由于采用移位重叠法,并避免了外部精密产品的影响,本发明估计出的每个批处理单元间的相位模糊度不确定度很小,接收机钟差更连续。
附图说明
图1为移位重叠原理图;
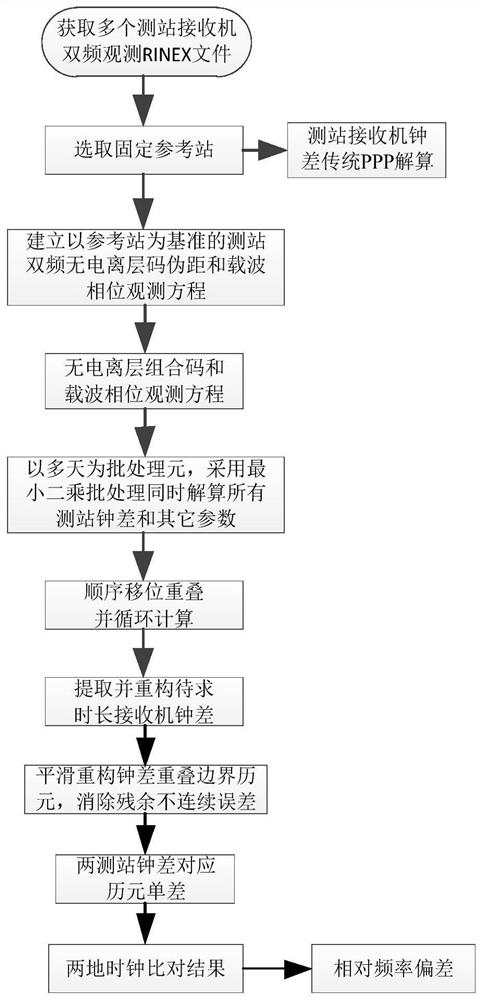
图2为移位重叠最小二乘批处理非差网解时间传递数据处理流程图;
图3为移位重叠最小二乘批处理的连续GNSS载波相位时间传递效果图;
图4为两地时钟的频率稳定度对比图;
图5为两地时钟的相对频率偏差图。
具体实施方式
下面结合附图和实施例对本发明进一步说明,本发明包括但不仅限于下述实施例。
本发明通过移位重叠最小二乘批处理非差网解法消除GNSS载波相位边界不连续误差,包括以下步骤:
步骤1:选取全球均匀分布的多个测站,所选测站数量不应低于10个,测站外接高性能原子钟或UTC时间尺度,以所选测站组成一个网络,获取多个测站接收机的双频码伪距和载波相位观测数据;
步骤2:在多个测站中选取一个外接氢原子钟或时间尺度的测站作为固定参考站;
步骤3:采用PPP法解算固定参考站接收机的钟差、对流层时延、相位模糊度以及站星间几何距离;
步骤4:以固定参考测站钟差估计结果为基准,建立其它测站相对参考测站的双频无电离层码伪距和载波相位组合观测模型,如下列公式所示:
式中,k和S分别代表待求测站接收机和观测卫星;
dT
dt
dt
d
c代表真空中光的传播速度,单位为米/秒;
λ代表载波相位波长,单位为米/周;
步骤5:以多天(例如N=6)代替1天作为一个批处理单元,采用最小二乘批处理算法一次解算批处理单元中每个历元(数据采样间隔是30s,1天内就有2880个历元;采样间隔是5分钟,天内就有288个数据)的测站接收机钟差;
步骤6:将既定的批处理单元向后顺序移位,并与上一个批处理单元重叠1天,然后按照步骤5中方法继续下一个解算批处理单元所有历元的测站接收机钟差,依次循环,直到解算完成所有数据时长(例如11天)的测站接收机钟差(最后一个批处理单元无论是否满足N=6,都以此为一个批处理单元);
步骤7:逐次提取每个批处理单元前N-1天的接收机钟差估计值,用来重构所有数据时长的测站接收机钟差序列;
步骤8:对重构钟差序列的相邻两个批处理单元边界历元处的测站接收机钟差进行平滑,消除移位重叠残余的边界不连续误差;
步骤9:对两测站接收机钟差(相对固定参考站)在数据时长内对应历元处作差,即可获得两测站时钟的差异,即时间传递或比对结果。
步骤10:通过时间比对结果计算两地时钟的频率稳定度及相对频率偏差。
本发明实施例提供的移位重叠最小二乘批处理的连续GNSS载波相位时间传递方法技术,包含以下步骤:
步骤1:获取需要进行时间比对的多个时间实验室测站接收机的GNSS双频码伪距和载波相位观测数据;
步骤2:在多个测站中选取一个外接氢原子钟或UTC时间尺度的测站作为固定参考测站;
步骤3:以参考测站的观测数据建立双频无电离层码伪距和载波相位观测模型,对双频码伪距和载波相位组合观测数据进行预处理,包括剔除粗差、平滑码伪距观测噪声、周跳探测与修复等,获得“干净”的组合观测数据;按照传统PPP测站钟差解算方法,采用IGS或MGEX分析中心提供的精密轨道、钟差、差分码偏差(DCB)产品以及Wu模型等误差改正模型,消除相关误差后,采用最小二乘法估计参考测站接收机钟差、位置坐标等参数;
步骤4:以参考测站钟差解算结果为基准,建立待求测站相对参考测站的类似传统PPP的双频无电离层码伪距和载波相位组合观测模型,表达如下:
式中,k和S分别代表待求测站接收机和观测卫星;
dT
dt
dt
d
c代表真空中光的传播速度,单位为米/秒;
λ代表载波相位波长,单位为米/周。
步骤5:对所有测站双频无电离层码伪距和载波相位观测方程进行线性化后,改正码伪距和载波相位观测值中各种时延误差。定轨时卫星和地球动力学模型(包括地球重力模型,太阳,月亮和行星吸引力,固体地球潮汐,海洋负荷和太阳辐射压力等)采用IERS最新模型,地球自转参数(ERP)从IERS服务器下载,所有测站坐标可采用传统PPP解算获得的结果或IGS给出结果,采用Wu模型对卫星天线和接收机天线相位缠绕误差进行改正;
步骤6:以多天为一个批处理单元,采用最小二乘批处理进行非差网解,估计批处理单元时长内所有测站相对于参考测站的接收机钟差,同时估算所有卫星钟差。
步骤7:向后顺序移位并与上一个批处理单元重叠1天,采用同样的参数估计算法重新进行新的批处理单元时长内接收机钟差的解算。移位重叠原理如图1所示。
步骤8:按照步骤7,依次循环计算,直到遍历所有时长;
步骤9:提取批处理单元内特定日的接收机钟差,连续重构待求测站接收机钟差序列;
步骤10:采用加权平均对重构的测站钟差在重叠日边界历元处进行平滑对接,消除重叠日边界历元处残余边界不连续误差;
步骤11:两测站接收机钟差在对应历元处作差,即获得两地时钟的时间传递结果;
步骤12:通过时间比对结果计算两地时钟比对的修正阿伦方差,如下列公式:
式中,x
N为钟差数据总数;
τ为钟差数据采样间隔,单位为30s;
m为重叠数据长度,m=1时修正阿伦方差即为阿伦方差。
步骤13:对时间比对结果进行历元间差分,计算两地时钟的相对频率偏差,如下列公式:
式中,y(τ
ΔT
τ
在时间比对时长内共有M+1个ΔT
- 一种连续的GNSS载波相位时间和频率传递方法
- 一种多模共频GNSS载波相位时间传递方法及系统