燃料电池车的控制装置以及燃料电池车
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及燃料电池车的控制装置以及燃料电池车。
背景技术
存在发动机车牵引被牵引车而进行行驶的情况(例如参照日本特开2017-007442)。
可考虑燃料电池车与发动机车同样地牵引被牵引车而进行行驶。这里,若燃料电池被维持为高输出状态,则存在燃料电池的温度过度上升的可能性。在这样的情况下,为了使燃料电池的温度降低而限制其输出。这里,当燃料电池车一边牵引重量大的被牵引车一边在上坡坡度大的路径行驶时,存在燃料电池变为高温而限制输出、导致车速降低的可能性。
发明内容
本发明提供能够高精度地预测对被牵引车进行牵引的燃料电池车的车速的降低并在预测到车速的降低的情况下将该情况报告给驾驶员的燃料电池车的控制装置以及燃料电池车。
本发明的一个方式提供燃料电池车的控制装置。燃料电池车的控制装置是燃料电池为电源、马达为驱动源的燃料电池车的控制装置,其中,具备:输出限制部,构成为在与上述燃料电池的温度相关的温度相关值表示为上述温度是温度阈值以上的情况下,限制上述燃料电池的输出;计算部,构成为计算被上述燃料电池车牵引的被牵引车的重量;坡度取得部,构成为取得上述燃料电池车的行驶预定路径中的各地点处的上坡坡度;预测部,构成为基于上述被牵引车的重量和上述上坡坡度来对上述燃料电池车以牵引上述被牵引车而行驶的牵引行驶状态在上述行驶预定路径行驶时是否被上述输出限制部限制上述燃料电池的输出进行预测;以及控制部,构成为在由上述预测部预测为上述燃料电池的输出被限制的情况下,通过搭载于上述燃料电池车的报告部来报告当上述燃料电池车以上述牵引行驶状态在上述行驶预定路径行驶时存在上述燃料电池车的车速降低的可能性这一情况的警告。
通过基于被牵引车的重量和上坡坡度来对牵引被牵引车的燃料电池车的燃料电池的输出是否被限制进行预测,能够高精度地预测因输出的限制引起的车速的降低。另外,在预测到车速的降低的情况下,能够报告给驾驶员。此外,“报告当上述燃料电池车以上述牵引行驶状态在上述行驶预定路径行驶时存在上述燃料电池车的车速降低的可能性这一情况的警告”并不限定于必须输出这样的消息的显示、声音,例如也包括预先从扬声器向驾驶员输出表示上述的警告内容的蜂鸣声、以规定的点亮图案将点亮装置点亮、使显示器显示规定的符号等。
在上述方式中,上述预测部可以构成为在上述被牵引车的重量为重量阈值以上且各地点处的上述上坡坡度中的至少一个为坡度阈值以上的情况下,预测为上述燃料电池的输出被限制。
在上述方式中,可以具备构成为取得牵引行驶状态信息的信息取得部,该牵引行驶状态信息包括上述燃料电池车以上述牵引行驶状态行驶的路面的倾斜角度、以及上述燃料电池车以上述牵引行驶状态在上述倾斜角度的路面行驶时的上述马达的转矩,上述计算部构成为基于上述牵引行驶状态信息来计算上述被牵引车的重量。
在上述方式中,上述牵引行驶状态信息可以包括上述燃料电池车以上述牵引行驶状态在上述倾斜角度的路面行驶时的上述燃料电池车的车速。
在上述方式中,也可以具备存储部,该存储部储存有规定了上述转矩、上述倾斜角度、上述车速以及上述被牵引车的重量的关系的映射,上述计算部构成为参照上述映射来计算上述被牵引车的重量。
在上述方式中,上述牵引行驶状态信息可以包括上述燃料电池车的重量、和上述燃料电池车以上述牵引行驶状态在上述倾斜角度的路面行驶时的上述燃料电池车的空气阻力、上述燃料电池车的加速度以及上述燃料电池车的变速器的变速比。
在上述方式中,也可以具备存储部,该存储部存储有规定了上述转矩、上述倾斜角度、上述燃料电池车的重量、上述空气阻力、上述加速度、上述变速比以及上述被牵引车的重量的关系的运算式,上述计算部构成为基于上述运算式来计算上述被牵引车的重量。
在上述方式中,上述控制部可以构成为通过上述报告部来报告催促规避上述行驶预定路径的行驶的警告。
在上述方式中,上述控制部可以构成为上述被牵引车的重量越大则越通过上述报告部来强调报告警告。
在上述方式中,上述控制部可以构成为上述上坡坡度越大则越通过上述报告部来强调报告警告。
在上述方式中,上述坡度取得部可以构成为从设定有上述行驶预定路径的导航装置取得上述上坡坡度。
在上述方式中,上述控制部可以构成为在由上述预测部预测为上述燃料电池的输出被限制的情况下,通过上述报告部来报告催促对设定于上述导航装置的上述行驶预定路径进行变更的警告。
在上述方式中,上述燃料电池车可以为乘用车。
本发明的其他方式提供一种燃料电池车,具备:燃料电池、马达以及上述燃料电池车的控制装置。
根据本发明,能够提供高精度地预测牵引被牵引车的燃料电池车的车速的降低并在预测到车速降低的情况下能够将该情况报告给驾驶员的燃料电池车的控制装置以及燃料电池车。
附图说明
以下,参照附图对本发明的示例性实施例的特征、优点、技术及工业重要性进行说明,在附图中相同的附图标记表示相同的构成要素,其中,
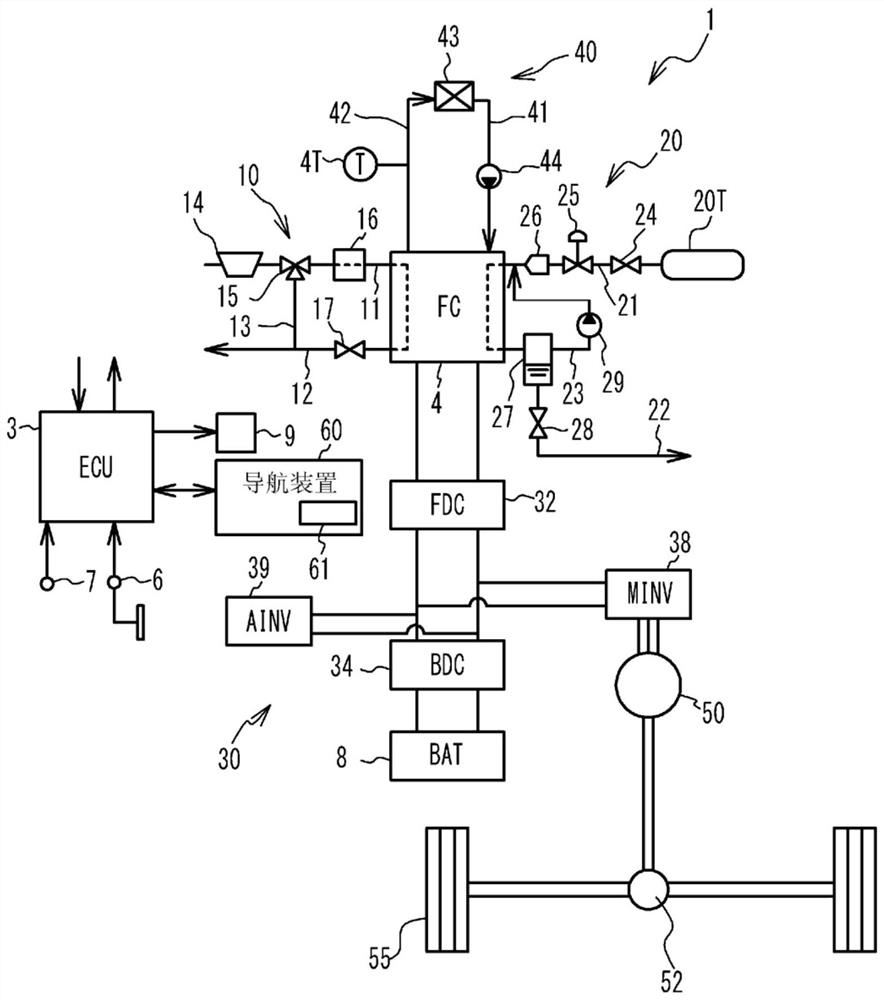
图1是燃料电池车的结构图。
图2是表示燃料电池车和被燃料电池车牵引的被牵引车的图。
图3是表示ECU所执行的控制的一个例子的流程图。
图4是表示警告处理的一个例子的流程图。
图5A是显示于仪表板显示器的图像的一个例子。
图5B是显示于仪表板显示器的图像的其他例子。
图5C是显示于仪表板显示器的图像的其他例子。
图5D是显示于仪表板显示器的图像的其他例子。
图5E是显示于仪表板显示器的图像的其他例子。
图6是在发现了新的引导路线的情况下显示于导航显示器的图像的一个例子的图。
图7A是表示警告处理的第1变形例的流程图。
图7B是表示警告处理的第2变形例的流程图。
图8A是显示于仪表板显示器的图像的其他例子。
图8B是显示于仪表板显示器的图像的其他例子。
图9是表示牵引重量的计算处理的一个例子的流程图。
图10是表示按路面的每个倾斜角度规定了马达的转矩、车速以及牵引重量的多个映射的一个例子的图。
具体实施方式
[燃料电池车1的简要结构]
图1是燃料电池车1的结构图。对于燃料电池车1而言,燃料电池(以下,称为FC)4是电源,马达50是驱动源。燃料电池车1包括ECU(Electronic Control Unit)3、FC4、二次电池(以下,称为BAT)8、氧化剂气体供给系统10、燃料气体供给系统20、电力控制系统30以及冷却系统40。另外,在燃料电池车1具备加速器开度传感器6、点火开关7、仪表板显示器9、行驶用的马达50、变速器52、车轮55以及导航装置60。仪表板显示器9设置于车厢内的由驾驶员能够操作的位置。导航装置60具有驾驶员能够操作的触摸面板式的导航显示器61。
FC4接受氧化剂气体与燃料气体的供给来进行发电。FC4层叠有多个固体高分子电解质型的单电池。单电池具备在电解质膜的两个面配置有电极的发电体亦即膜电极接合体和夹持膜电极接合体的一对隔板。电解质膜是由具有磺酸基的氟类树脂材料或者烃类树脂材料形成的固体高分子膜,在湿润状态下具有良好的质子传导性。电极构成为包括碳载体和作为具有磺酸基的固体高分子且在湿润状态下具有良好的质子传导性的离聚物。在碳载体担载有用于促进发电反应的催化剂(例如铂或者铂-钴合金等)。在各单电池设置用用于供反应气体、冷却水流动的歧管。在歧管中流动的反应气体经由设置于各单电池的气体流路而被供给至各单电池的发电区域。
氧化剂气体供给系统10将包含氧的空气作为氧化剂气体供给至FC4,并包括供给管11、排出管12、旁通管13、空气压缩机14、旁通阀15、中冷器16以及背压阀17。供给管11与FC4的阴极入口歧管连接。排出管12与FC4的阴极出口歧管连接。旁通管13将供给管11以及排出管12连通。旁通阀15设置于供给管11与旁通管13的连接部分。旁通阀15切换供给管11与旁通管13的连通状态。空气压缩机14、旁通阀15以及中冷器16从上游侧起被依次配置于供给管11上。背压阀17配置于排出管12上的比排出管12与旁通管13的连接部分靠上游侧的位置。空气压缩机14将包含氧的空气作为氧化剂气体经由供给管11供给至FC4。供给至FC4的氧化剂气体经由排出管12被排出。中冷器16对向FC4供给的氧化剂气体进行冷却。背压阀17调整FC4的阴极侧的背压。空气压缩机14、旁通阀15以及背压阀17的驱动由ECU3控制。ECU3通过控制空气压缩机14的旋转速度,能够调整向FC4供给的氧化剂气体的流量。另外,ECU3通过控制旁通阀15以及背压阀17的开度,能够调整供给至FC4的氧化剂气体的流量以及被旁通的氧化剂气体的流量。
燃料气体供给系统20将氢气作为燃料气体供给至FC4,并包括罐20T、供给管21、排出管22、循环管23、罐阀24、调压阀25、喷射器(以下,称为INJ)26、气液分离器27、排水阀28以及氢循环泵(以下,称为HP)29。罐20T与FC4的阳极入口歧管通过供给管21而连接。在罐20T中存积有作为燃料气体的氢气。排出管22与FC4的阳极出口歧管连接。循环管23将气液分离器27与供给管21连通。罐阀24、调压阀25以及INJ26从供给管21的上游侧起被依次配置。在罐阀24打开的状态下,调压阀25的开度被调整,INJ26喷射燃料气体。由此,向FC4供给燃料气体。在排出管22从上游侧起依次配置有气液分离器27以及排水阀28。气液分离器27从由FC4排出的燃料气体分离水分并存积。存积于气液分离器27的水因排水阀28打开而经由排出管22向燃料电池车1的外部排出。循环管23是用于使燃料气体向FC4回流的配管,上游侧的端部与气液分离器27连接,并配置有HP29。从FC4排出的燃料气体被HP29适度加压,向供给管21引导。罐阀24、调压阀25、INJ26、排水阀28以及HP29的驱动由ECU3控制。
电力控制系统30包括燃料电池DC/DC转换器(以下,称为FDC)32、电池DC/DC转换器(以下,称为BDC)34、马达逆变器(以下,称为MINV)38、辅机逆变器(以下,称为AINV)39。FDC32基于从ECU3发送的请求电流值来控制FC4的输出电流,并且调整来自FC4的直流电力而输出至MINV38、AINV39。BDC34调整来自BAT8的直流电力并输出至MINV38、AINV39。FC4的发电电力能够充电至BAT8。MINV38将被输入的直流电力变换成三相交流电力并向马达50供给。马达50经由变速器52使车轮55旋转,由此使得燃料电池车1行驶。FC4以及BAT8的电力能够经由AINV39供给至负载装置。负载装置包括FC4用的辅机与车辆用的辅机。FC4用的辅机包括上述的空气压缩机14、旁通阀15、背压阀17、罐阀24、调压阀25、INJ26、排水阀28以及HP29。车辆用的辅机例如包括空调设备、照明装置、危险警示灯等。
冷却系统40通过使冷却水经由规定的路径循环来冷却FC4。冷却系统40包括供给管41、排出管42、散热器43、水泵(以下,称为WP)44以及温度传感器4T。供给管41与FC4的冷却水供给歧管连接。排出管42与FC4的冷却水排出歧管连接。散热器43与供给管41和排出管42连接。WP44被配置于供给管41上。WP44使作为制冷剂的冷却水经由供给管41以及排出管42在FC4与散热器43之间循环。散热器43通过与外部空气进行热交换来冷却从FC4排出的冷却水。WP44的驱动由ECU3控制。
温度传感器4T设置于排出管42上,对从FC4排出并在散热器43中流动之前的冷却水的温度进行检测。ECU3取得该检测结果。对于温度传感器4T的检测温度而言,由于对从FC4排出并流动至散热器43之前的冷却水的温度进行检测,所以该检测温度越高,则表示FC4的温度也越高。温度传感器4T所检测的冷却水的温度是与FC4的温度相关的温度相关值的一个例子。此外,作为FC4的温度,虽然使用了由温度传感器4T检测的冷却水的温度,但并不局限于此,例如也可以设置直接检测FC4的温度的传感器,通过该传感器来检测FC4的温度。
ECU3包括CPU(Central Processing Unit)、ROM(Read Only Memory)以及RAM(Random Access Memory)。ECU3电连接有加速器开度传感器6、点火开关7、仪表板显示器9、空气压缩机14、旁通阀15、背压阀17、罐阀24、调压阀25、INJ26、排水阀28、HP29、FDC32以及BDC34。ECU3基于加速器开度传感器6的检测值、上述的车辆用的辅机及FC4用的辅机的驱动状态、以及BAT8的蓄电电力等来计算向FC4的请求输出,并基于该请求输出来计算向FC4的请求电流值。另外,ECU3根据向FC4的请求输出控制空气压缩机14、INJ26来控制向FC4供给的氧化剂气体以及燃料气体的流量,并基于FC4的请求电流值控制FDC32,由此控制FC4的输出电流。ECU3是统一控制燃料电池车1整体的燃料电池车1的控制装置的一个例子。ECU3具备输出限制部、计算部、坡度取得部、预测部以及控制部。另外,ECU3也可以具备信息取得部、存储部。
[牵引状态]
图2是表示燃料电池车1和被燃料电池车1牵引的被牵引车100的图。燃料电池车1在车身2的后端部设置有向后方突出的挂钩2a。挂钩2a例如具有在沿铅垂方向立设的柱状部件的上端部设置的球状的挂钩球2b。
被牵引车100亦被称为挂车,具备主体102、车轮105、连结部件106以及连接器108。连接器108设置于连结部件106的前端部。在连接器108形成有覆盖挂钩球2b的球状的凹部。通过连接器108覆盖挂钩球2b,使得被牵引车100相对于燃料电池车1连结为能够转弯。燃料电池车1能够以这样的状态下行驶。
[输出限制]
FC4如上所述被冷却水冷却,但若FC4被维持为高输出状态而冷却水从FC4接受的热量超过散热器43中的冷却水的散热能力,则冷却水的温度上升,FC4的温度也上升。若FC4过于高温,则存在FC4的电解质膜等熔损的可能性。因此,在温度传感器4T的检测温度成为预先决定的阈值以上的情况下,ECU3限制FC4的输出以使FC4的最大输出低于FC4的最大额定输出。该处理是在与FC4的温度相关的温度相关值表示为FC4的温度是温度阈值以上的情况下限制FC4的输出的输出限制部所执行的处理的一个例子。具体而言,ECU3通过使空气压缩机14的旋转速度降低并使INJ26的燃料气体喷射量降低等来使供给至FC4的氧化剂气体以及燃料气体比通常时减少,限制FC4的输出而使温度降低。
例如在燃料电池车1如上述那样牵引被牵引车100进行行驶时,根据被牵引车100的重量与行驶路面的上坡坡度,存在FC4的输出增大而变为高温、FC4的输出被限制的可能性。由此,存在燃料电池车1的车速比未限制FC4的输出的情况降低的可能性。本实施例中的ECU3执行用于使这样牵引被牵引车100的燃料电池车1的驾驶员预先认识到是存在车速降低的可能性的状况的控制。
[ECU3的控制]
图3是表示ECU3所执行的控制的一个例子的流程图。图4是表示后述的警告处理的一个例子的流程图。图5A~图5E分别是显示于仪表板显示器9的图像D1~D5的例子。其中,在仪表板显示器9显示有图像D1~D5的情况下,也可从燃料电池车1的车厢内的扬声器通过声音输出该图像内的消息。仪表板显示器9、车厢内的扬声器是报告部的一个例子。
首先,参照图3对ECU3所执行的控制进行说明。每隔规定时间便重复执行该控制。ECU3执行对预料为燃料电池车1正牵引的被牵引车的重量亦即牵引重量f进行计算的计算处理(步骤S1)。步骤S1的处理是计算部所执行的处理的一个例子。关于牵引重量f的具体的计算方法将后述。
接下来,ECU3基于牵引重量f的计算结果来对燃料电池车1是否正牵引被牵引车进行判定(步骤S2)。具体而言,若计算出的牵引重量f为规定值以上,则判定为燃料电池车1正牵引被牵引车,若牵引重量f小于规定值,则判定为燃料电池车1未牵引被牵引车。这里,规定值例如被设定为比燃料电池车1的最大装载量大的值。在步骤S2中为否的情况下,本控制结束。
在步骤S2中为是的情况下,ECU3使仪表板显示器9显示用于催促驾驶员确认被牵引车100的图像D1(步骤S3)。在图像D1显示“检测到挂车牵引。无错误么?”这一消息、和“是”、“否”、“取消”。ECU3对图像D1上的“是”的区域是否被操作进行判定(步骤S4)。在步骤S4中为否的情况下、即操作了“否”或者“取消”的区域的情况下,ECU3消除图像D1(步骤S5),结束本控制。
在步骤S4中为是的情况下,ECU3对是否已经对于导航装置60设定完引导路线进行判定(步骤S6)。在步骤S6中为否的情况下,ECU3将催促驾驶员安全驾驶的图像D5显示于仪表板显示器9(步骤S10)。例如在图像D5显示“请注意安全进行驾驶。”这一消息。图像D5在仪表板显示器9被显示规定时间之后消除。然后,本控制结束。
在步骤S6中为是的情况下,ECU3取得在导航装置60设定完毕的引导路线上的各地点处的上坡坡度r[%](步骤S7)。步骤S7的处理是坡度取得部所执行的处理的一个例子。
接下来,ECU3对牵引重量f是否为阈值α以上进行判定(步骤S8)。阈值α例如为2000kg。阈值α是重量阈值的一个例子。在步骤S8中为否的情况下,执行步骤S10的处理,本控制结束。
在步骤S8中为是的情况下,ECU3对在引导路线上是否存在上坡坡度r为阈值β以上的地点进行判定(步骤S9)。阈值β例如为8%。阈值β是坡度阈值的一个例子。这里,步骤S8以及S9中的阈值α以及β分别被设定为当燃料电池车1正牵引被牵引车在引导路线行驶时预测为FC4的温度上升而限制FC4的输出的牵引重量以及上坡坡度。例如基于实验结果来设定阈值α以及β。步骤S8以及S9的处理是对当正在引导路线行驶时是否通过输出限制部来限制FC4的输出进行预测的预测部所执行的处理的一个例子。在步骤S9中为否的情况下,执行步骤S10的处理,本控制结束。此外,步骤S8以及S9的顺序是任意的。
在步骤S9中为是的情况下,ECU3执行警告处理(步骤S11)。警告处理是用于向驾驶员报告存在车速降低的可能性这一情况的警告的处理。如以上那样,能够基于牵引重量f与引导路线上的上坡坡度r来高精度地预测存在FC4的输出被限制而导致车速降低的可能性,在预测到车速的降低的情况下,能够预先将该情况报告给驾驶员。以下,对具体的警告处理的内容详细进行说明。
[警告处理]
如图4所示,在警告处理中,ECU3使仪表板显示器9显示图像D2(步骤S21)。图像D2是将有在坡道车速降低的可能性报告给驾驶员并且催促驾驶员判断是否变更当前在导航装置60中设定的引导路线的图像。例如在图像D2中显示“有在坡道车速降低的可能性。变更引导路线么?”这一消息、和“是”、“否”以及“取消”。这样,由于能够使驾驶员预先认识到存在车速降低的可能性,所以即便在车速实际降低了的情况下也能够减少驾驶员的不协调感、不安感。步骤S21的处理是控制部所执行的处理的一个例子。图像D2是燃料电池车1以牵引行驶状态在行驶预定路径行驶时存在燃料电池车1的车速降低的可能性的情况的警告的一个例子,另外,也是催促对设定于导航装置60的行驶预定路径进行变更的警告的一个例子。
接下来,ECU3对是否存在变更引导路线的指示进行判定(步骤S22)。在步骤S22为否的情况下、即若图像D2的“否”或者“取消”的区域被操作,则ECU3使仪表板显示器9显示图像D5(步骤S29),结束本控制。
在步骤S22中为是的情况下、即若图像D2的“是”的区域被操作,则ECU3将重新检索不包括成为阈值β以上的坡度r的地点的新的引导路线的指示输出至导航装置60(步骤S23)。
接下来,ECU3通过与导航装置60的通信来对这样的导航装置60是否发现了引导路线进行判定(步骤S24)。在步骤S24中为否的情况下,ECU3使仪表板显示器9显示将无法发现新的引导路线报告给驾驶员的图像D3(步骤S25)。例如在图像D3显示“找不到引导路线。”这一消息。然后,ECU3执行步骤S29的处理,本控制结束。
在步骤S24中为是的情况下,ECU3使仪表板显示器9显示催促驾驶员向新的引导路线变更的图像D4(步骤S26)。例如在图像D4显示“新检索到引导路线。请触摸想要变更的引导路线。”这一消息和“取消”。步骤S26的处理是控制部所执行的处理的一个例子。图6是在发现了新的引导路线的情况下显示于导航显示器61的图像的一个例子的图。图6表示了已经设定完的引导路线R1和重新再次探索到的引导路线R2以及R3。驾驶员能够通过触摸引导路线R2以及R3中的任一个来变更引导路线。
接下来,ECU3对图像D4的“取消”的区域是否被操作进行判定(步骤S27)。在步骤S27中为是的情况下,ECU3执行步骤S29的处理,本控制结束。
在步骤S27中为否的情况下,ECU3基于来自导航装置60的信号来对是否变更了引导路线进行判定(步骤S28)。在步骤S28中为否的情况下,再次执行步骤S27的处理。在步骤S28中为是的情况下,ECU3执行步骤S29的处理,本控制结束。
[警告处理的变形例]
接下来,对警告处理的多个变形例进行说明。图7A是表示警告处理的第1变形例的流程图。图7B是表示警告处理的第2变形例的流程图。图8A以及图8B分别是显示于仪表板显示器9的图像D6以及D7的一个例子。此外,在仪表板显示器9显示有图像D6以及D7的情况下,也可从燃料电池车1的车厢内的扬声器通过声音输出该图像内的消息。
首先对警告处理的第1变形例进行说明。如图7A所示,ECU3对牵引重量f是否为阈值α1以上进行判定(步骤S31)。阈值α1是比上述的阈值α大规定值的值。阈值α1例如为3000kg。阈值α1是重量阈值的一个例子。在步骤S31中为是的情况下、即在牵引重量f比较重的情况下,ECU3使仪表板显示器9显示图像D6(步骤S32)。在步骤S31中为否的情况下、即在牵引重量f为阈值α以上但小于阈值α1的情况下,ECU3使仪表板显示器9显示图像D7(步骤S33)。在图像D6中,与图像D7相比,强调车速降低的可能性且也强调了引导路线的行驶的规避。例如在图像D6中,显示“在坡道存在大幅度的车速降低的可能性。请尽力避开引导路线的行驶。”这一消息。例如在图像D7中,显示“在坡道存在车速降低的可能性。推荐避开引导路线的行驶。”这一消息。这样,可以不催促变更已经设置于导航装置60的引导路线,而是牵引重量f越大则越强调报告警告。步骤S32的处理是控制部所执行的处理的一个例子。图像D6以及D7是燃料电池车1正以牵引行驶状态在行驶预定路径行驶时存在燃料电池车1的车速降低的可能性的情况的警告的一个例子,另外,也是催促规避行驶预定路径的行驶的警告的一个例子。
接下来,对警告处理的第2变形例进行说明。如图7B所示,ECU3对在已经设定于导航装置60的引导路线上是否存在坡度r成为阈值β1以上的地点进行判定(步骤S31a)。阈值β1是比上述的阈值β大规定值的值。阈值β1是坡度阈值的一个例子。阈值β1例如为12%。在步骤S31a中为是的情况下、即在引导路线上存在上坡坡度比较陡的地点的情况下,ECU3执行步骤S32的处理。在步骤S31a中为否的情况下、即在上坡坡度r为阈值β以上但小于阈值β1的情况下,ECU3执行步骤S33的处理。这样,可以不催促变更已经设定于导航装置60的引导路线,而是引导路线上的上坡坡度越陡、则越强调警告。
[牵引重量f的计算处理]
接下来,对牵引重量f的计算处理进行说明。图9是表示牵引重量f的计算处理的一个例子的流程图。ECU3对燃料电池车1是否处于在马达50的驱动下的前进行驶中进行判定(步骤S41)。这是因为在马达50停止的状态或马达50处于再生运转状态的情况下,无法取得后述的用于计算牵引重量f的牵引行驶状态信息。这里,再生运转是指在燃料电池车1的减速时、下坡时将马达50作为发电机来运转而获得燃料电池车1的制动力并且将所产生的再生电力的至少一部分充电至BAT8的运转。其中,步骤S41的处理具体基于车速传感器所表示的车速、马达50的消耗电力来对燃料电池车1是否处于在马达50的驱动下的前进行驶中进行判定。若车速传感器所表示的车速是大于零的值且马达50的消耗电力是大于零的值,则判定为燃料电池车1处于在马达50的驱动下的前进行驶中。能够基于马达50的驱动电流、旋转速度来计算马达50的消耗电力。在步骤S41中为否的情况下,结束本控制。
在步骤S41中为是的情况下,ECU3取得牵引行驶状态信息(步骤S42)。牵引行驶状态信息包括在燃料电池车1牵引被牵引车100行驶的牵引行驶状态下燃料电池车1所行驶的路面的倾斜角度、在牵引行驶状态燃料电池车1在该倾斜角度的路面行驶时的马达50的转矩以及燃料电池车1的车速。路面的倾斜角度[rad]能够从燃料电池车1的倾斜角传感器取得。马达50的转矩[N]例如能够通过将马达50的消耗电力[W]除以马达50的旋转速度[r/min]并乘以规定的系数来计算。如上所述,能够基于马达50的驱动电流、旋转速度来计算马达50的消耗电力。马达50的驱动电流可以从安装于马达50的电流传感器取得。马达50的旋转速度能够通过设置于马达50的旋转速度传感器来取得。车速[km/h]能够从燃料电池车1的车速传感器取得。步骤S42的处理是信息取得部所执行的处理的一个例子。
接下来,ECU3参照映射并基于牵引行驶状态信息来计算牵引重量f(步骤S43)。图10是表示按路面的每个倾斜角度θ1、θ2、θ3…规定了马达50的转矩、车速以及牵引重量f的多个映射的一个例子的图。这些映射被预先存储于ECU3的存储器。ECU3的存储器是存储部的一个例子。倾斜角度θ1、θ2、θ3…既包括上坡坡度的情况也包括下坡坡度的情况。在图10所示的映射中,倾斜角度θ1表示了上坡坡度的情况。
在各映射中示出了转矩等值线T1~T3。转矩等值线T1~T3中的转矩等值线T1表示最大的转矩,转矩等值线T3表示最小的转矩。倾斜角度不仅包括上坡坡度,还包括下坡坡度。对于倾斜角度为上坡坡度的映射而言,马达50的转矩越大、车速越慢、上坡坡度下的倾斜角度越小,则将牵引重量f规定为越大的值。这是因为存在如下趋势:牵引重量f越大,则为了牵引被牵引车100所需的马达50的转矩越增大。另外,因为存在牵引重量f越大则车速越降低的趋势。另外,因为在马达50的转矩以及车速相同的条件的情况下,上坡坡度下的倾斜角度越小,则表示为牵引重量f越大。另外,关于倾斜角度为缓和的下坡坡度的映射也同样,马达50的转矩越大、车速越慢、下坡坡度的倾斜角度越小,则将牵引重量f规定为越大的值。在倾斜角度为缓和的下坡坡度中,由于重力的作用对加速的影响小,滚动阻力也大,所以与倾斜角度为上坡坡度的情况同样。对于倾斜角度为陡峭的下坡坡度的映射而言,马达50的转矩越小、车速越快、下坡坡度的倾斜角度越小,则将牵引重量f规定为越大的值。这是因为此时,由于重力的作用带来的加速变大,滚动阻力变小,所以即便马达50的转矩小也能够牵引被牵引车100。通过使用这样的映射来计算牵引重量f,能够减少ECU3的处理负荷。
[牵引重量f的计算处理的变形例]
另外,也可以使用以下的运算式(1)来计算牵引重量f。
f={(T×Gr÷D-Ra)/(g(μ+sinθ)+a)}-F…(1)
在ECU3的存储器中存储有运算式(1)。θ[rad]表示燃料电池车1在当前时刻所行驶的路面的倾斜角度。如上所述,路面的倾斜角度能够从燃料电池车1的倾斜角传感器取得。T[N·m]表示在牵引行驶状态下燃料电池车1正在该倾斜角度的路面行驶时的马达50的转矩。Gr[-]表示在牵引行驶状态下燃料电池车1正在该倾斜角度的路面行驶时的变速器52的变速比。若变速器52的变速比固定,则变速比总是作为恒定的值被预先存储于ECU3的存储器。若变速器52是能够切换为多个变速比的多级变速器,则从传感器等检测变速比。D[m]是车轮55的外径,作为燃料电池车1的固有值被预先存储于ECU3的存储器。Ra[N]表示在牵引行驶状态下燃料电池车1正在该倾斜角度的路面行驶时的燃料电池车1的空气阻力。车速越增大,则空气阻力越指数函数地增大。在ECU3的存储器中存储有规定了空气阻力与车速的关系的映射,能够参照该映射而从当前时刻的车速计算空气阻力。
g[m/s
[其他]
虽然使用了仪表板显示器9作为报告部来显示图像D1~D7,但并不限定于此。例如也可以通过使用导航显示器61作为报告部显示图像D1~D7来报告警告。另外,也可以使用设置于车厢内的扬声器或者设置于导航装置60的扬声器作为报告部,通过该扬声器来声音输出显示于图像D1~D7的消息,由此来报告警告。也可以仅通过图像显示或者声音输出的一方来报告警告。另外,也可以通过使仪表板显示器9等显示规定的符号、图形、标记等来报告警告。另外,也可以使用设置于车厢内的LED等点亮装置作为报告部,使该点亮装置点亮、或者使点亮装置闪烁等变更点亮图案,由此来报告上述的警告。另外,也可以通过扬声器而借助蜂鸣声来报告上述的警告。另外,在强调报告警告的情况下,可以将显示于仪表板显示器9等的符号放大显示、或者使之闪烁,也可以增大蜂鸣声、或者变更蜂鸣器的种类、或者变更LED的点亮图案。
虽然如步骤S1以及S2那样计算牵引重量f并根据牵引重量f的大小对燃料电池车1是否正牵引被牵引车进行了判定,但并不限定于此。例如,在燃料电池车1搭载了拍摄燃料电池车1的后方的照相机的情况下,可以通过对该照相机的拍摄图像进行图像识别处理来判定燃料电池车1是否正牵引被牵引车。另外,也可以在挂钩球2b周边的挂钩2a设置对挂钩球2b与连接器108卡合这一情况进行检测的传感器,并通过该传感器来对燃料电池车1是否正牵引被牵引车进行判定。在任一情况下,均需要与燃料电池车1是否正牵引被牵引车的判定独立地计算牵引重量f。
上述的阈值α、α1、β以及β1为固定值,但并不限定于此。例如也可以是牵引重量f越大、则越减小阈值β以及β1中的至少任一个。这是因为牵引重量f越大,则即便上坡坡度小,FC4的输出也越增大而越高温化,存在FC4的输出被限制的可能性。另外,也可以是外部空气温越低、则越增大阈值α、α1、β以及β1中的至少任一个。这是因为外部空气温度越低,则越能促进散热器43中的冷却水的散热而抑制FC4的高温化,FC4的输出被限制的可能性减少。
ECU3可以使导航显示器61例如闪烁等对上坡坡度成为阈值α或者α1以上的地点进行强调显示。由此,驾驶员容易规避该地点的行驶。
ECU3可以使仪表板显示器9等显示计算出的牵引重量f。
燃料电池车1为乘用车,可以为大型乘用车、中型乘用车、小型乘用车中的任一个。另外,如果是未设置直接检测牵引重量的传感器等的燃料电池车,则也可以为乘用车以外的车辆。
以上,对本发明的实施例进行了详述,但本发明并不限定于上述特定的实施例,在技术方案所记载的本发明主旨的范围内能够实现各种变形/变更。
- 燃料电池车的控制装置以及燃料电池车
- 燃料电池车测试系统和燃料电池车测试方法