感应式电磁驱动巡检机器人
文献发布时间:2023-06-19 11:34:14
技术领域
本公开属于巡检机器人技术领域,具体涉及一种感应式电磁驱动巡检机器人。
背景技术
目前轨道巡检机器人采用旋转电机通过机械传动结构驱动行走轮,这样的巡检机器人具有结构复杂、易磨损、速度慢、爬坡能力差等缺点。
发明内容
本公开旨在至少解决现有技术中存在的技术问题之一,提供一种感应式电磁驱动巡检机器人。
本公开提供一种感应式电磁驱动巡检机器人,所述巡检机器人包括机器人本体和轨道,所述机器人本体上设置有电磁线圈,所述轨道在对应所述电磁线圈的位置处设置有感应件,以驱动所述机器人本体沿所述轨道移动。
在一些实施方式中,所述轨道包括位于中央区域的安装部以及位于边缘区域的支撑部;
所述安装部设置有所述感应件,所述支撑部用以支撑所述机器人本体的行走轮。
在一些实施方式中,所述安装部设置有安装槽,所述安装槽用于容置所述感应件。
在一些实施方式中,所述感应件采用高导电率材料制作形成。
在一些实施方式中,所述感应件采用铜或铝材料制作形成。
在一些实施方式中,所述感应件的厚度范围为2mm~4mm。
在一些实施方式中,所述巡检机器人还包括导磁件,所述导磁件设置在所述感应件背离所述机器人本体的一侧。
在一些实施方式中,所述导磁件采用钢材料制作形成。
在一些实施方式中,所述导磁件的厚度范围为3mm~6mm。
在一些实施方式中,所述感应件和所述导磁件均呈板状结构。
本公开的巡检机器人,采用感应式电磁直驱方式,无需传统旋转电机以及机械传动结构。本公开的巡检机器人结构简单,避免了机械传动结构的磨损问题,速度更好,推力更大。
附图说明
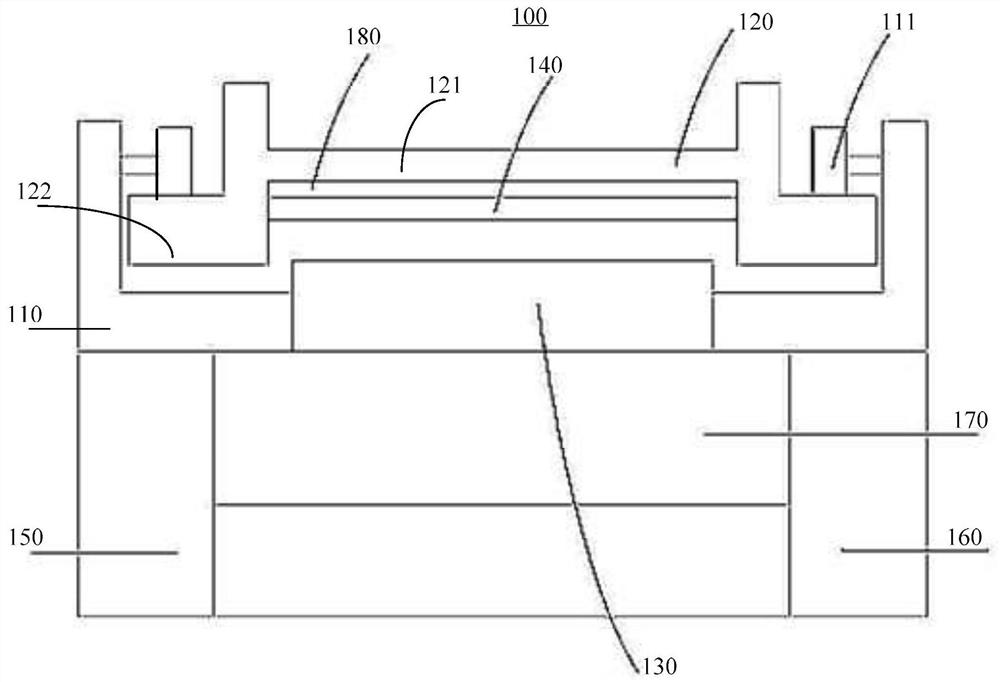
图1为本公开一实施例的感应式电磁驱动巡检机器人的结构示意图;
图2为本公开另一实施例的感应式电磁驱动巡检机器人的原理示意图。
具体实施方式
为使本领域技术人员更好地理解本公开的技术方案,下面结合附图和具体实施方式对本公开作进一步详细描述。
本实施例涉及一种感应式电磁驱动巡检机器人。如图1所示,所述巡检机器人100包括机器人本体110和轨道120,所述机器人本体110上设置有电磁线圈130,所述轨道120在对应所述电磁线圈130的位置处设置有感应件140。
具体地,如图1所示,在向所述机器人本体110上的所述电磁线圈130通入交流电时,会在所述机器人本体110与所述感应件140之间产生交变的电磁场,该电磁场在所述感应件140中产生感应电涡流,所述电磁场与感应电涡流产生排斥力,从而推动所述机器人本体110沿着轨道120做直线运动。
本实施例的巡检机器人,采用感应式电磁直驱方式,无需传统旋转电机以及机械传动结构。该实施例的巡检机器人结构简单,避免了机械传动结构的磨损问题,速度更好,推力更大。
需要说明的是,机器人本体上所设置的电磁线圈可以是一个整体,也可以是由多段子线圈构成,相应的,感应件也可以是一个整体,或者也可以是由多个子感应件构成,本领域技术人员可以根据实际需要确定,本实施例对此并不限制。
进一步需要说明的是,对于感应件的具体结构并没有作出限定,只要是能够满足交变的电磁场在该感应件中可以产生感应电流即可,本实施例对此并不限制。
不难理解,本实施例的巡检机器人除了包括上述提及的部件以外,巡检机器人还可以包括其他一些已知的部件。如图1所示,巡检机器人100还包括设置在机器人本体110中的控制单元150、传感器160以及电池170。电池170用于向所述控制单元150和传感器160供电。传感器160用于检测巡检机器人的实际运行参数并反馈至所述控制单元150。所述控制单元150根据实际运行参数对巡检机器人进行控制等。
示例性的,如图1所示,所述轨道120包括位于中央区域的安装部121以及位于边缘区域的支撑部122。所述安装部121设置有所述感应件140,所述支撑部122用以支撑所述机器人本体110的行走轮111。具体地,如图1所示,在轨道120两端对称设置有多个支撑部122,支撑部122的上表面用于与行走轮111接触。
示例性的,如图1所示,所述安装部121设置有安装槽,所述安装槽用于容置所述感应件140。
本实施例的巡检机器人,通过在安装部上设置内陷的安装槽以容置所述感应件,可以使得巡检机器人的结构更加紧凑,并且,设置在安装槽中的感应件可以使得产生感应电流更加集中,从而便于提供稳定且更大的电磁力推动巡检机器人移动。
示例性的,如图1所示,所述感应件140采用高导电率材料制作形成。例如,所述感应件140可以选用导电率在90%以上的材料制作形成,如铜或铝等,当然,除此以外,感应件也可以选用其他一些高导电率材料制作形成,本实施例对此并不限制。
本实施例的巡检机器人,感应件采用高导电率材料制作形成,如铝或铜等,从而可以在感应件中产生较强的感应电流,以更好地推动巡检机器人移动。
示例性的,如图1所示,所述感应件140可以呈板状结构,该板状结构的厚度范围可以为2mm~4mm,优选地为3mm。处于该厚度范围的感应件140,一方面可以使得巡检机器人的成本较低,另外一方面,交变的电磁场可以在感应件140中产生很强的感应电流,这样可以实现生产成本与驱动效果之间的平衡。当然,除此以外,本领域技术人员还可以根据实际需要,设计其他一些形状和厚度的感应件140,本实施例对此并不限制。
示例性的,如图1所示,所述巡检机器人100还包括导磁件180,所述导磁件180设置在所述感应件140背离所述机器人本体110的一侧。导磁件180选用导磁率较高的材料制作形成,例如,导磁件180可以采用钢材料制作形成等等,本实施例对此并不限制。
本实施例的巡检机器人,通过在感应件的背面设置导磁件,该导磁件的导磁率较高,有利于电磁场形成回路,从而提高磁场应用效率。
示例性的,如图1所述,导磁件180也可以设计成板状结构,导磁件180的厚度范围可以为3mm~6mm。
下面将结合图1和图2具体说明本公开的巡检机器人的工作原理。
如图1和图2所示,当机器人主体110上的电磁线圈130的三相绕组(AX、BY、CZ)通入对称正弦交流电流时,会产生气隙磁场。沿着直线方向按正弦规律分布。它是沿着直线平移,称为行波磁场,如图2中1曲线所示。
行波磁场切割感应件140,将在感应件140中产生感应电动势和感应电流,感应件140中的感应电流和气隙磁场相互作用,产生切向电磁力。感应件140固定不动,巡检机器人便在这个电磁力的作用下,顺着行波磁场的移动方向作直线运动。
可以理解的是,以上实施方式仅仅是为了说明本公开的原理而采用的示例性实施方式,然而本公开并不局限于此。对于本领域内的普通技术人员而言,在不脱离本公开的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本公开的保护范围。
- 感应式电磁驱动巡检机器人
- 巡检机器人、巡检机器人系统及巡检机器人巡检方法