一种半导体晶圆平整度检测设备
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及半导体生产设备,尤其涉及一种半导体晶圆平整度检测设备。
背景技术
在一种晶圆片的生产过程中,常需要采用平整度检测设备对其进行平整度检测,以检测其是否有缺陷,以保证产品质量。常用的晶圆平整度检测设备成本较高,并且使用不便,其检测效率还有待提升。因此,有必要对这种晶圆检测装置进行结构优化,以克服上述缺陷。
发明内容
本发明的目的是提供一种半导体晶圆平整度检测设备,以便于对晶圆进行平整度检测。
本发明为解决其技术问题所采用的技术方案是:
一种半导体晶圆平整度检测设备,包括:
支承装配组件,该支承装配组件中具有安装空间;
晶圆存储组件,该晶圆存储组件安装于支承装配组件上,其内部具有放置晶圆片的空间;
横向承载组件,该横向承载组件安装于支承装配组件上,并与晶圆存储组件位置对应;
晶圆移送组件,该晶圆移送组件安装于横向承载组件上,可在横向承载组件上沿横向移动,由晶圆移送组件对晶圆存储组件内的晶圆片进行抓取并移送;
对中调节组件,该对中调节组件安装于支承装配组件上,并与晶圆移送组件配合,由对中调节组件对晶圆移送组件携带的晶圆片进行对中调节;
距离检测组件,该距离检测组件安装于支承装配组件上,并与晶圆移送组件配合,由晶圆移送组件将晶圆片送至距离检测组件中进行检测。
支承装配组件包括:
支承框架,该支承框架内部具有装配台面,晶圆存储组件安装于支承框架外壁,横向承载组件、晶圆移送组件、对中调节组件及距离检测组件安装于装配台面上。
晶圆存储组件包括:
存储盒体,该存储盒体设有一组,各存储盒体分别安装于支承框架外壁,并沿横向顺次排布,各存储盒体内分别具有晶圆片定位结构,待检测晶圆片放置于存储盒体内,支承框架中开设有一组取放通口,各取放通口分别与存储盒体位置对应;
解锁装置,该解锁装置与存储盒体配合,由解锁装置对存储盒体进行解锁操作。
在一个实施例中,解锁装置包括:
解锁框架,该解锁框架中具有安装空间;
装配台面,该装配台面安装于解锁框架顶部;
转接背板,该转接背板安装于解锁框架的背部,其上段向支撑框架上方伸出,转接背板中开设有取片通口;
升降电机,该升降电机安装于解锁框架上,并位于装配台面下方;
传动丝杆,该传动丝杆位于装配台面下方,并沿竖向放置,升降电机的动力输出轴与传动丝杆连接;
导向滑轨,该导向滑轨设有一对,各导向滑轨分别安装于解锁框架上,并与传动丝杆相互平行;
转接架体,该转接架体位于装配台面下方,其两端分别通过导向滑块安装于导向滑轨上,其中部通过传动螺母与传动丝杆配合;
竖向立柱,该竖向立柱设有一组,各竖向立柱分别安装于转接架体上,并贯穿装配台面向上方伸出;
支承环圈,该支承环圈安装于竖向立柱顶部;
限位侧条,该限位侧条设有一对,各限位侧条安装于支承环圈上,并分列于支承环圈两端;
横移电机,该横移电机安装于装配台面上;
支承平台,该支承平台通过横向导向结构安装于装配台面上,并通过丝杆传动结构与横移电机的动力输出轴连接。
在另一个实施例中,解锁装置包括:
解锁架体,该解锁架体中具有安装空间;
装配面板,该装配面板安装于解锁架体前部,装配面板中开设有取放通口;
装配载板,该装配载板安装于解锁架体顶部,并位于装配面板后方;
定位平台,该定位平台通过滑动结构安装于装配载板上,可在装配载板上移动;
调节推杆,该调节推杆安装于装配载板上,并与定位平台衔接,由调节推杆带动定位平台移动,使定位平台靠近或远离装配面板;
定位拉簧,该定位拉簧安装于定位平台与装配载板之间,由定位拉簧带动定位平台向装配面板移动,使晶圆盒与取放通口配合;
竖向平台,该竖向平台通过竖向导轨安装于支承架体中,并与驱动结构衔接,可沿竖向导轨移动;
横向平台,该横向平台通过横向导轨安装于竖向平台上,并与驱动结构衔接,可沿横向导轨移动;
配接载架,该配接载架安装于横向平台上,可随横向平台一同移动,其形状与取放通口适配,可经取放通口与晶圆盒门体接合;
配接销柱,该配接销柱安装于配接载架上,并与开设于晶圆盒门体中的销孔适配,配接载架与晶圆盒门体接合时,配接销柱伸入销孔内;
吸附盘片,该吸附盘片安装于配接载架上,配接载架与晶圆盒门体接合时,吸附盘片吸住晶圆盒门体;
解锁钥匙,该解锁钥匙安装于配接载架上,并与晶圆盒门体中的锁孔适配,配接载架与晶圆盒门体接合时,解锁钥匙伸入锁孔内;
解锁电机,该解锁电机安装于配接载架上,并与解锁钥匙衔接,由解锁电机带动解锁钥匙运转,对晶圆盒进行解锁。
横向承载组件包括:
横向轨杆,该横向轨杆设有一对,各横向轨杆分别安装于装配台面上,并相互平行;
横向载板,该横向载板通过滑块安装于横向轨杆上;
横向电机,该横向电机安装于装配台面上,并通过传动结构与横向载板衔接,由横向电机带动横向载板沿横线轨杆移动。
晶圆移送组件包括:
支承底板;
支承顶板,该支承顶板位于支承底板上方;
支承侧板,该支承侧板位于支承底板与支承顶板之间,其两端分别与支承底板及支承顶板连接,在支承底板、支承顶板及支承侧板之间围护形成安装空间;
升降导轨,该升降导轨沿竖向放置,其两端分别与支承底板及支承顶板连接;
升降架体,该升降架体通过滑动结构安装于升降导轨上,可沿升降导轨升降;
升降电机,该升降电机安装于支承底板上,其动力输出轴通过传动结构与升降架体衔接,由升降电机带动升降架体沿升降导轨升降;
偏转筒体,该偏转筒体底部通过转动结构安装于升降架体上,可随升降架体一同升降,并可在升降架体上偏转,其顶部从支承顶板中伸出;
偏转电机,该偏转电机安装于升降架体上,可随升降架体一同升降,其动力输出轴通过传动结构与偏转筒体衔接,由偏转电机带动偏转筒体偏转;
抓取手臂,该抓取手臂设有一对,各抓取手臂分别安装于偏转筒体顶部,可随偏转筒体一同升降并偏转;
片体抓手,该片体抓手设有一对,并分别安装于抓取手臂末端,由片体抓手对晶圆片进行抓取,并由抓取手臂带动携带晶圆片的片体抓手移动。
对中调节组件包括:
调节座体,该调节座体安装于装配台面上;
纵向轨杆,该纵向轨杆安装于调节座体上,并与横向轨杆相互垂直;
旋转电机,该旋转电机通过滑块安装于纵向轨杆上,可沿纵向轨杆移动;
纵向电机,该纵向电机安装于调节座体上,并通过传动结构与旋转电机衔接,由纵向电机带动旋转电机沿纵向轨杆移动;
对中吸盘,该对中吸盘安装于旋转电机的动力输出轴末端,由旋转电机带动其旋转,并由对中吸盘对晶圆片进行吸附定位并携带其旋转。
距离检测组件包括:
检测框架,该检测框架中具有安装空间,检测框架顶部具有可放置晶圆片的工作台面,工作台面中开设有避位通口;
直线马达,该直线马达沿横向放置,其定子部件安装于检测框架中;
升降马达,该升降马达安装于直线马达的动子部件上;
旋转马达,该旋转马达通过传动结构与升降马达衔接;
旋转吸盘,该旋转吸盘安装于旋转马达上,由旋转马达带动其旋转,并通过气路与抽气系统连通;
电容距离传感器,该电容距离传感器安装于支承框架上,并与旋转吸盘位置对应。
本发明的优点在于:
该检测设备设置了一组存储盒体,并与横向载板位置对应,使得横向载板上的移送抓手可在各存储盒体中分别取放晶圆片,在送入距离检测组件中进行检测,通过电容距离传感器将晶圆片的距离转换成厚度高度等指标从而来计算晶圆片的平整度指标,具有检测精度高,稳定性好,检测效率高等优点,可提高晶圆检测速度和精度,降低人工成本,防止检测误判,从而提升产品质量。
附图说明
图1是本发明提出的半导体晶圆平整度检测设备的外部结构示意图;
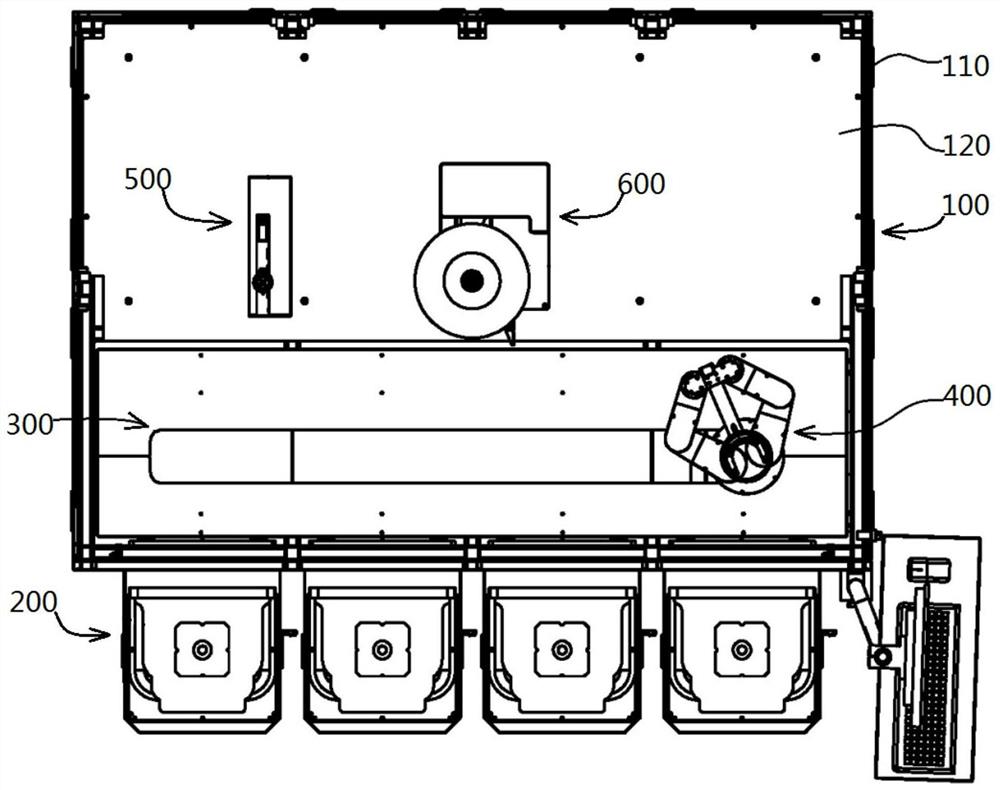
图2是该检测设备的内部结构示意图;
图3是8吋晶圆存储盒体的解锁装置的结构示意图;
图4是12吋晶圆存储盒体的解锁装置的结构示意图;
图5是横向承载组件的结构示意图;
图6是晶圆移送组件的结构示意图;
图7是对中调节组件的结构示意图;
图8是距离检测组件的结构示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1~图8所示,本发明提出的半导体晶圆平整度检测设备包括支承装配组件100、晶圆存储组件200、横向承载组件300、晶圆移送组件400、对中调节组件500及距离检测组件600,支承装配组件中具有安装空间,晶圆存储组件安装于支承装配组件上,其内部具有放置晶圆片的空间,横向承载组件安装于支承装配组件上,并与晶圆存储组件位置对应,晶圆移送组件安装于横向承载组件上,可在横向承载组件上沿横向移动,由晶圆移送组件对晶圆存储组件内的晶圆片进行抓取并移送,对中调节组件安装于支承装配组件上,并与晶圆移送组件配合,由对中调节组件对晶圆移送组件携带的晶圆片进行对中调节,距离检测组件安装于支承装配组件上,并与晶圆移送组件配合,由晶圆移送组件将晶圆片送至距离检测组件中进行检测。
支承装配组件包括:
支承框架110,该支承框架内部具有装配台面120,晶圆存储组件安装于支承框架外壁,横向承载组件、晶圆移送组件、对中调节组件及距离检测组件安装于装配台面上。
晶圆存储组件包括:
存储盒体210,该存储盒体设有一组,各存储盒体分别安装于支承框架外壁,并沿横向顺次排布,各存储盒体内分别具有晶圆片定位结构,待检测晶圆片放置于存储盒体内,支承框架中开设有一组取放通口,各取放通口分别与存储盒体位置对应;
解锁装置220,该解锁装置与存储盒体配合,由解锁装置对存储盒体进行解锁操作。
在图3所示的实施例中,存储盒体为8吋晶圆存储盒体,对应的解锁装置包括:
解锁框架221,该解锁框架中具有安装空间;
装配台面222,该装配台面安装于解锁框架顶部;
转接背板223,该转接背板安装于解锁框架的背部,其上段向支撑框架上方伸出,转接背板中开设有取片通口;
升降电机224,该升降电机安装于解锁框架上,并位于装配台面下方;
传动丝杆225,该传动丝杆位于装配台面下方,并沿竖向放置,升降电机的动力输出轴与传动丝杆连接;
导向滑轨226,该导向滑轨设有一对,各导向滑轨分别安装于解锁框架上,并与传动丝杆相互平行;
转接架体227,该转接架体位于装配台面下方,其两端分别通过导向滑块安装于导向滑轨上,其中部通过传动螺母与传动丝杆配合;
竖向立柱228,该竖向立柱设有一组,各竖向立柱分别安装于转接架体上,并贯穿装配台面向上方伸出;
支承环圈229,该支承环圈安装于竖向立柱顶部;
限位侧条2210,该限位侧条设有一对,各限位侧条安装于支承环圈上,并分列于支承环圈两端;
横移电机,该横移电机安装于装配台面上;
支承平台2211,该支承平台通过横向导向结构安装于装配台面上,并通过丝杆传动结构与横移电机的动力输出轴连接。
在图4所示的实施例中,存储盒体为12吋晶圆存储盒体,对应的解锁装置包括:
解锁架体231,该解锁架体中具有安装空间;
装配面板232,该装配面板安装于解锁架体前部,装配面板中开设有取放通口;
装配载板233,该装配载板安装于解锁架体顶部,并位于装配面板后方;
定位平台234,该定位平台通过滑动结构安装于装配载板上,可在装配载板上移动;
调节推杆,该调节推杆安装于装配载板上,并与定位平台衔接,由调节推杆带动定位平台移动,使定位平台靠近或远离装配面板;
定位拉簧235,该定位拉簧安装于定位平台与装配载板之间,由定位拉簧带动定位平台向装配面板移动,使晶圆盒与取放通口配合;
竖向平台236,该竖向平台通过竖向导轨安装于支承架体中,并与驱动结构衔接,可沿竖向导轨移动;
横向平台237,该横向平台通过横向导轨安装于竖向平台上,并与驱动结构衔接,可沿横向导轨移动;
配接载架238,该配接载架安装于横向平台上,可随横向平台一同移动,其形状与取放通口适配,可经取放通口与晶圆盒门体接合;
配接销柱239,该配接销柱安装于配接载架上,并与开设于晶圆盒门体中的销孔适配,配接载架与晶圆盒门体接合时,配接销柱伸入销孔内;
吸附盘片2310,该吸附盘片安装于配接载架上,配接载架与晶圆盒门体接合时,吸附盘片吸住晶圆盒门体;
解锁钥匙2311,该解锁钥匙安装于配接载架上,并与晶圆盒门体中的锁孔适配,配接载架与晶圆盒门体接合时,解锁钥匙伸入锁孔内;
解锁电机2312,该解锁电机安装于配接载架上,并与解锁钥匙衔接,由解锁电机带动解锁钥匙运转,对晶圆盒进行解锁。
横向承载组件包括:
横向轨杆310,该横向轨杆设有一对,各横向轨杆分别安装于装配台面上,并相互平行;
横向载板320,该横向载板通过滑块安装于横向轨杆上;
横向电机330,该横向电机安装于装配台面上,并通过传动结构与横向载板衔接,由横向电机带动横向载板沿横线轨杆移动。
晶圆移送组件包括:
支承底板410;
支承顶板420,该支承顶板位于支承底板上方;
支承侧板430,该支承侧板位于支承底板与支承顶板之间,其两端分别与支承底板及支承顶板连接,在支承底板、支承顶板及支承侧板之间围护形成安装空间;
升降导轨440,该升降导轨沿竖向放置,其两端分别与支承底板及支承顶板连接;
升降架体450,该升降架体通过滑动结构安装于升降导轨上,可沿升降导轨升降;
升降电机460,该升降电机安装于支承底板上,其动力输出轴通过传动结构与升降架体衔接,由升降电机带动升降架体沿升降导轨升降;
偏转筒体470,该偏转筒体底部通过转动结构安装于升降架体上,可随升降架体一同升降,并可在升降架体上偏转,其顶部从支承顶板中伸出;
偏转电机,该偏转电机安装于升降架体上,可随升降架体一同升降,其动力输出轴通过传动结构与偏转筒体衔接,由偏转电机带动偏转筒体偏转;
抓取手臂480,该抓取手臂设有一对,各抓取手臂分别安装于偏转筒体顶部,可随偏转筒体一同升降并偏转;
片体抓手490,该片体抓手设有一对,并分别安装于抓取手臂末端,由片体抓手对晶圆片进行抓取,并由抓取手臂带动携带晶圆片的片体抓手移动。
对中调节组件包括:
调节座体510,该调节座体安装于装配台面上;
纵向轨杆520,该纵向轨杆安装于调节座体上,并与横向轨杆相互垂直;
旋转电机530,该旋转电机通过滑块安装于纵向轨杆上,可沿纵向轨杆移动;
纵向电机540,该纵向电机安装于调节座体上,并通过传动结构与旋转电机衔接,由纵向电机带动旋转电机沿纵向轨杆移动;
对中吸盘550,该对中吸盘安装于旋转电机的动力输出轴末端,由旋转电机带动其旋转,并由对中吸盘对晶圆片进行吸附定位并携带其旋转。
距离检测组件包括:
检测框架610,该检测框架中具有安装空间,检测框架顶部具有可放置晶圆片的工作台面611,工作台面中开设有避位通口612;
直线马达620,该直线马达沿横向放置,其定子部件安装于检测框架中;
升降马达630,该升降马达安装于直线马达的动子部件上;
旋转马达640,该旋转马达通过传动结构与升降马达衔接;
旋转吸盘650,该旋转吸盘安装于旋转马达上,由旋转马达带动其旋转,并通过气路与抽气系统连通;
电容距离传感器660,该电容距离传感器安装于支承框架上,并与旋转吸盘位置对应。
该检测设备设置了一组存储盒体,并与横向载板位置对应,使得横向载板上的移送抓手可在各存储盒体中分别取放晶圆片,在送入距离检测组件中进行检测,通过电容距离传感器将晶圆片的距离转换成厚度高度等指标从而来计算晶圆片的平整度指标,具有检测精度高,稳定性好,检测效率高等优点,可提高晶圆检测速度和精度,降低人工成本,防止检测误判,从而提升产品质量。
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,“设置”、“连接”等术语应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接连接,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
- 一种半导体晶圆平整度检测设备
- 一种半导体晶圆移送装置及移送半导体晶圆的方法